
Fターム[2B062CA15]の内容
移植機(田植機の要素) (4,646) | 制御 (808) | 連動制御 (503) | 速度←→位置 (64)
Fターム[2B062CA15]に分類される特許
1 - 20 / 64
作業車の変速操作構造
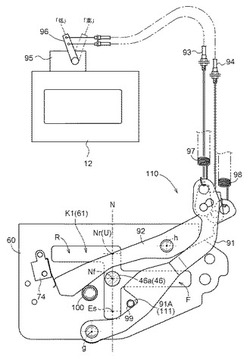
【課題】エンジン停止を叶える上での不具合を解決できるようにする。
【解決手段】走行機体の走行速度を変速する変速装置の変速操作具46が、中立エリアNを介して前進変速用操作径路Fと後進変速用操作径路Rとに亘った一連の変速用操作経路K1を移動操作可能に設けられ、変速用操作経路K1に沿って変速操作具46を操作するに伴ってアクセル95を連動させる連動手段110が設けられている作業車の変速操作構造であって、変速操作具46をこの位置に操作することでエンジン12が停止されるエンジン停止用操作位置ESが、変速用操作経路K1に分岐する状態に備えられ、エンジン停止用操作位置ESに変速操作具46を位置させることによるエンジン停止時には、変速操作具46の操作がアクセル95に連動しないようにする非連動手段111が設けられている。
(もっと読む)
苗移植機

【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
水田作業機
【課題】変速レバーに多くの機能を与えることによって、水田作業機における操作性の向上を図る。
【解決手段】変速レバーを後進変速操作経路の中立位置Nrに操作した状態でのエンジンの回転速度と、変速レバーを後進変速操作経路の後進1速r1に対応した位置に操作した状態でのエンジンの回転速度とが同じになるように構成する。変速レバーを後進変速操作径路の最高速位置に操作した状態でのエンジンの回転速度が、変速レバーを前進変速操作径路の最高速位置に操作した状態でのエンジンの回転速度よりも小さくなるように構成する。
(もっと読む)
作業車両
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
田植機
【課題】苗継ぎ作業時に、エンジンの回転数をアイドル回転数よりも低下させた場合でも、植付部を設定角度に維持することができる田植機を提供する。
【解決手段】エンジン14が搭載された走行部10の後方に植付部40を左右傾斜可能に装着した田植機1において、制御装置100は、苗継ぎ位置検出スイッチ23aのON信号を検出すると、エンジン14の回転数がアイドル回転数より低い設定回転数となるように第一アクチュエータ71を制御して、かつ、角速度センサ61の検出値Bを静止状態の検出値Bで置き換えて前記第二アクチュエータ72を制御する。
(もっと読む)
作業車両
【課題】土質の柔らかい圃場での旋回走行が円滑に行える作業車両を提供すること。
【解決手段】前輪3と後輪4を有する機体2と、前輪へのデファレンシャル機構を切り替えるデフロック機構170と、デフロック機構170を制御するデフロック制御機構200aと、後輪の上下位置を変更するための圧縮スプリングと後輪伝動ケース111と回動軸部112等とを備えた苗移植装置1であって、圧縮スプリング及び後輪伝動ケース111等を作動させる後輪車高調整用シリンダーモーター110と、デフロック機構170の作動を検出する前輪デフロックペダル操作検出スイッチ150と、そのスイッチ150が前記作動を検出した場合、後輪車高調整用シリンダーモーター110を作動させて機体2の車高を変更する車高変更制御機構200bとを備えた作業車両である。
(もっと読む)
作業車両
【課題】走行停止状態での待機時間を不要としつつ、後進走行中に従来より短時間に作業機を上昇できる作業車両を提供すること。
【解決手段】機体2の後部に苗移植装置7を装着するためのリンク機構8と、リンク機構を昇降させる昇降装置30と、機体2に設けられたエンジン6と、エンジン6の動力を変速して出力する変速装置5と、前進走行域、停止域、及び後進走行域の何れかの位置に切り替えることにより、変速装置の出力を変化させて走行速度を操作する走行操作レバー10と、走行操作レバー10が少なくとも後進走行域にある場合に苗移植装置7の上昇速度をエンジン回転数に基づいて制御する第1の制御を行う制御部200とを備え、第1の制御は、走行操作レバー10が、後進走行域の内、走行速度を最高に設定する最高速位置にあるときのエンジン回転数よりも、最高速位置より手前の位置にあるときのエンジン回転数の方を高くする制御である、作業車両。
(もっと読む)
苗移植機
【課題】
苗載せ台を畦際側とは反対側へ移動させるときは、苗植機の走行を直ちに停止して、植付装置の植付操作を停止して、苗タンクを目的の方向へ大きく移動させて、苗移植機の旋回操作等を行わせる。又、この一旦横端へ移動させていた苗タンクを移動前の苗植付停止位置に戻してから、苗移植機の植付動作を行わせる必要があり、煩雑で正確な操作を要し、相当の時間と熟練を要する。
【解決手段】
植付装置3の伝動を停止した状態で苗タンク2を横端へ移動させるときの、摺動軸1の横送回転数をタンク送りセンサ6で検出し、この苗タンク2が横端に移動した後に前記苗植作用を開始するときは、前記タンク送りセンサ6が検出した横送回転数に基づいて摺動軸1を伝動回転して、前回苗植停止位置に苗タンク2を移動復帰する構成とする。
(もっと読む)
作業機
【課題】 本発明は、種々の条件に対応して原動機の駆動回転数を適正に設定し、良好な走行性能及び作業性能を得ることを課題とする。
【解決手段】 走行推進体と原動機を備える走行車体を設け、走行車体の後側に昇降リンク装置を介して作業部を昇降可能に設け、昇降リンク装置を昇降させる昇降用アクチュエータを設け、原動機は走行推進体と昇降用アクチュエータを駆動する構成とし、該昇降用アクチュエータを駆動させて作業部を昇降操作する昇降操作具を設けた作業機において、昇降用アクチュエータが作業部を上昇作動させるとき、走行推進体が停止する状態であれば原動機の駆動回転数を上昇用の設定回転数まで上昇させる構成とした。
(もっと読む)
苗移植機の畦際代掻装置
【課題】
土質が硬い畦際でも土壌面を均平にすることができ、畦際に植え付けられる苗の植付深さを安定させると共に、ロータの回転により発生する泥水流の発生を抑えられる苗移植機を提供する。
【解決手段】
畦際クラッチレバー13の操作で一部の苗植付条域の植付装置5の伝動を停止した状態で畦際植付行程を苗植すると共に、代掻ロータ12のうち畦際植付条域Aの代掻ロータ12Aの伝動回転速を、他の植付条域Bの代掻ロータ12Bの伝動回転速に対して変速可能に構成すると共に、サイドロータ12Sの回転内周部にサイドロータ軸16の周りに回転自在、またはセンタロータ12Cとは異なる回転の抵抗ロータ19を設ける構成とする。
(もっと読む)
苗移植機
【課題】ぬかるみやすい圃場における安定走行の確保とともに、ぬかるみにくい圃場における燃費向上および排ガス低減を可能とする苗移植機を提供する。
【解決手段】苗移植機は、エンジン(5)の動力を変速して走行装置(2,3)および苗移植装置(6)に伝動する変速伝動装置(4)、変速レバー(4a)の指示に応じてエンジン(5)および変速伝動装置(4)を動作制御する制御装置(11a)等を設けて植付け走行可能に構成され、上記制御装置(11a)は、変速レバー(4a)の指示に対するエンジン回転の動力特性が、低燃費走行用の低回転モード(L)と、通常の回転による標準モード(M)と、ぬかるみ走行用の高回転モード(H)のいずれかを選択可能に構成するとともに、変速レバー(4a)の指示が停車時の停止速および発進直後の低速域の範囲について高回転モード(H)を適用するものである。
(もっと読む)
水田作業機
【課題】無段変速装置の変速レバーに多くの機能を与えることによって、走行変速操作に関連して他の操作をレバーの持ち替えなく軽快かつ速やかに行えるようにして、水田作業機における操作性の向上を図る。
【解決手段】変速レバー11を前進変速操作径路Fにおいて中立位置Nから高速位置側へ操作するに連れて調速機構25を高回転側に作動させるよう、変速レバー11と調速機構25を連係し、前進変速操作径路Fと後進変速操作径路Rにを、互いに平行、かつ、段違い状に偏位させて接続するとともに、後進変速操作径路Rの中立位置N(r)から引き続く前進方向への直線移動操作によって移行可能な副前進変速操作径路F’を、前進変速操作径路Fにおける低速域部分の横側に連設してある。
(もっと読む)
苗移植機
【課題】作業者が労力を費やすことなく「展開状態」と「収納状態」との切り替えを行うことができ、切替作業中であっても他の作業を中断せずにすみ、作業能率を向上することが可能な苗移植機を提供する。
【解決手段】第1〜3予備苗載台38a〜38cが前後一列に並んだ「展開状態」と、上下多段に並んだ「収納状態」とを第1〜3移動リンク部材39a〜39cにより切替可能な予備苗載台と、駆動力が与えられると、回動軸ax1,ax2を中心に第1〜3移動リンク部材39a〜39cを回動させる回動ギア300gと、回動ギア300gに駆動力を与える切替モータ300mとを設けた。
(もっと読む)
田植機
【課題】変速ペダルの踏み込み操作により加減速する際に、変速ペダルの踏み込み量に対応して緩急をつけた加減速が可能となり、変速フィーリングの向上に貢献可能な田植機を提供する。
【解決手段】田植機1は、エンジン14と、モータ71と、モータ用ポテンショメータ71aと、変速ペダル67と、ペダル用ポテンショメータ67aと、を備え、ペダル用ポテンショメータ67aが出力するペダル信号に基づいてモータ71の目標駆動量を算出して、モータ用ポテンショメータ71aの検出値が前記目標駆動量になるようにモータ71を駆動して、車速をモータ71の目標駆動量に対応した大きさに変更する田植機1であって、変速ペダル67の操作範囲を複数の変速領域に分割して、前記複数の変速領域毎に、変速ペダル67の踏み込み量の変化に対するモータ71の目標駆動量の変化の割合を設定する。
(もっと読む)
移植機
【課題】油圧式無段変速装置を利用する走行停止機能や降車走行操作機能を併せ持つ。
【解決手段】機体停止ペダル35の操作に応じて、油圧式無段変速装置14を強制的にニュートラル状態に復帰させ、かつ、機体停止ブレーキ装置30を制動状態にする乗用型田植機1において、機体停止ペダル35の操作に応じて、油圧式無段変速装置14をニュートラルに位置決めする位置決め部材49と、該位置決め部材49と油圧式無段変速装置14との連繋を解除可能な連繋解除部材50と、降車位置から操作可能な畔越えハンドル12と、機体停止操作状態における畔越えハンドル12の操作に応じて、機体停止ブレーキ装置30の制動状態を解除すると共に、位置決め部材49と油圧式無段変速装置14との連繋を解除して、油圧式無段変速装置14を微速前進状態に操作する微速前進操作手段と、を備える。
(もっと読む)
苗移植機
【課題】
走行車体が左右方向に傾斜すると、苗植装置が圃場面に対して略左右水平姿勢となるようにローリング駆動させ、苗の植付姿勢を安定させる苗移植機を提供する。
【解決手段】
圃場を走行する走行車体2の後部に苗を積載する苗載せ台4と、苗載せ台4の下部に苗載せ台4から苗を取って圃場に植える植付装置5からなる苗植装置6を設け、苗植装置6の傾斜量を検出する傾斜検知部材53を設け、傾斜検知部材53の検知に合わせて苗植装置6を左右方向に回動させるローリング機構Rを設けた苗移植機において、走行車体2に圃場の凹凸に対応して上下回動するローリング機構R2を設け、走行ローリング機構R2に所定量以上の回動を検知する走行ローリング検知部材49L,49Rを設け、走行ローリング検知部材49L,49Rが所定量以上の回動を検知したとき、ローリング機構Rの作動速度を減速させる構成とする。
(もっと読む)
作業機
【課題】凹凸の多い荒れた圃場面を作らないようにした整地装置と苗植付装置を備えた苗移植機を提供すること。
【解決手段】 整地ロータ27a,27bを支持する平行リンク6と該平行リンク6を昇降させる整地ロータ昇降モータ7と、該昇降モータ7の作動を検知する作動検知手センサ80を苗植付部4に設け、植付部昇降操作レバー78を操作して昇降シリンダ46を作動させると、該昇降シリンダ46の作動に連動して昇降モータ7の作動検知センサ80が昇降シリンダ46を作動を検知すると昇降操作レバー78を操作して苗植付部4が昇降することにより、整地昇降モータ7が連動して動作するため、苗植付部4にある整地ロータ27a,27bの上下動を植付部昇降操作レバー78を操作するだけで行うことができるので、作業者は走行車体2の直進操作や旋回操作に集中することができ、苗の植付精度が向上する。
(もっと読む)
移動農機
【課題】使用頻度の高いエンジンの高回転域で、安定した作業速度を確保して作業の高能率化を図ることができるようにした移動農機を提供しようとするものである。
【解決手段】エンジン2の出力回転数を変更するアクセルペダル87と、前記アクセルペダル87の操作位置を検出するアクセルセンサ92を備え、前記アクセルセンサ92の出力に基づき、アクセルセンサ92の出力に対応するエンジン2回転数が、エンジン2の出力回転数として得られるように、前記出力回転数を制御するように構成する移動農機において、前記出力回転数の上限を設定する上限設定手段30,99,100を備え、前記アクセルセンサ92の出力に対応するエンジン2回転数が、前記上限設定手段30,99,100により設定した上限回転数よりも高い場合には、前記上限回転数が前記出力回転数として得られように、前記出力回転数を制御するように構成したものである。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
1 - 20 / 64
[ Back to top ]