
Fターム[2B063CA16]の内容
移植機(田植機の接地部) (1,596) | 連動制御 (163) | 自動昇降制御 (150) | 植付装置の上下動を検出して所望の機構を制御 (13)
Fターム[2B063CA16]に分類される特許
1 - 13 / 13
乗用型水田作業機
【課題】センサーフロートの前部を下方に付勢する付勢機構及び付勢力変更機構、昇降制御手段を備えた場合、付勢力変更機構の操作が行い易くなるように構成する。
【解決手段】作業装置におけるセンサーフロート9の上方の部分に高さセンサー68を備え、センサーフロート9の前部と高さセンサー68とに亘って連係部材55を接続して、作業装置に対するセンサーフロート9の上下位置を高さセンサー68により検出する。高さセンサー68の検出値に基づいて、田面Gから作業装置までの高さが設定高さに維持されるようにする昇降制御手段を備える。作業装置におけるセンサーフロート9の上側で且つ連係部材55の前側の部分に、連係部材55を下方側に付勢する付勢機構57と、付勢機構57の付勢力を変更する付勢力変更機構56とを備える。
(もっと読む)
作業機

【課題】凹凸の多い荒れた圃場面を作らないようにした整地装置と苗植付装置を備えた苗移植機を提供すること。
【解決手段】 整地ロータ27a,27bを支持する平行リンク6と該平行リンク6を昇降させる整地ロータ昇降モータ7と、該昇降モータ7の作動を検知する作動検知手センサ80を苗植付部4に設け、植付部昇降操作レバー78を操作して昇降シリンダ46を作動させると、該昇降シリンダ46の作動に連動して昇降モータ7の作動検知センサ80が昇降シリンダ46を作動を検知すると昇降操作レバー78を操作して苗植付部4が昇降することにより、整地昇降モータ7が連動して動作するため、苗植付部4にある整地ロータ27a,27bの上下動を植付部昇降操作レバー78を操作するだけで行うことができるので、作業者は走行車体2の直進操作や旋回操作に集中することができ、苗の植付精度が向上する。
(もっと読む)
苗植機
【課題】
圃場の土壌面は、場所によって肥料分の濃度が異なり、植付けた苗の生育度を大きく異にすることが多く、甚だしきは、苗の生育障害や、病虫害を招き易い部分を生じて、局部的な育生被害を受けることが多い。
【解決手段】
車体1の後部に施肥装置2を設け、昇降リンク3を介して昇降しながら土壌面を滑走均平するフロート4を有した苗植装置5を連結する苗植機において、フロート4の底部にフロート4の滑走する土壌面に介入して肥料濃度を検出する肥料センサ6を設け、肥料センサ6の検出結果に対応させて施肥装置2の施肥量を調節可能に構成する。
(もっと読む)
苗移植機
【課題】 本発明の課題は、接地検出センサとして、地表面に接触することにより発生する歪、衝撃が検出できる圧電セラミックス素子を用いることによって、低コストで地表面の変化を的確に検出でき、シンプルな制御が可能な制御手段を具現することにある。
【解決手段】 本発明は、苗植付部(2)の前側に地表面を整地する整地ロータ(4)を備えてある苗移植機において、圃場の地表面に対する接触により発生する歪、衝撃が検出できる圧電セラミックスプレートからなる接触検出センサ(3)を苗植付部(2)の適所に配置して設け、該接地検出センサ(3)は、この接地面が地表面に沿うように対設すると共に、地表面の変化検出結果に基づき苗植付部の植付姿勢を自動制御する。
(もっと読む)
乗用田植機
【課題】本発明の課題は、車速の変化に応じて整地ロータ、特に中央のセンタロータを昇降制御することによって、ロータの地中への潜り込みを防止し、整地作業が的確に行えるようにする。
【解決手段】この発明は、苗植付部(4)の前側に植付直前の圃場面を均平化する前位のセンタロータ(27b)と後位のサイドロータ(27a)からなる整地ロータ(27)を設置し、該整地ロータ(27)は、車速の変化に応じて上下動可能に構成すると共に、車速の所定以上の増速に伴い前位のセンタロータが上昇変位すべく関連構成する。
(もっと読む)
田植機
【課題】走行部が傾斜しても整地装置を適切な位置で整地作業をすることができる田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を昇降自在に取り付けた田植機において、走行部の前後方向の傾斜角度を検出する傾斜角度検出手段と、植付部の植付深さ位置を検出する植付深さ位置検出手段と、両検出手段の検出結果に基づいて整地装置の整地高さを算出補正する制御部と、同制御部により制御されて整地装置を昇降させる昇降用アクチュエータとを具備するようにしている。
(もっと読む)
水田作業機
【課題】水田作業装置と機体との間に整地装置を備えた水田作業機において、水田作業装置を昇降自在及び整地装置の高さを上下に変更自在に構成した場合、整地装置と水田作業装置や機体との干渉を回避する。
【解決手段】機体の後部にリンク機構3を介して水田作業装置5を昇降自在に支持し、水田作業装置5と機体との間に整地装置53を昇降自在に支持する。水田作業装置5又は機体に対する整地装置53の高さを上下に変更自在な変更手段56を備える。機体に対する水田作業装置5の高さに応じて、変更手段56による整地装置53の高さ変更に制限を加える制限手段を備える。
(もっと読む)
苗移植機
【課題】ロータの上下の変動を勘案して圃場に苗を植え付けることができる苗移植機を提供すること。
【解決手段】油圧シリンダ46によりリンク装置3を介してフロート55を上下動させ、苗植付部4に対して昇降自在に配置され、走行車体2の進行方向を横断する横幅方向に向けて複数個配置されるロータ27a,27bをモータ63で上下動させる。フロート55の前後傾斜角度の複数の設定角度にそれぞれ対応させてフロート55の上下動の感度を敏感側から鈍感側までの複数段階に分けて制御感度変更ダイヤルで制御感度として設定し、モータ63の駆動量の設定に応じてロータ27a,27bの設定高さを調節し、接地圧変動によるフロート55の姿勢変化に基づいて苗植装置4の上下位置を制御し、モータ63によるロータ27a,27bの設定高さを低く設定すればする程、フロート55の制御感度を鈍感側に補正する制御をする制御装置100を設けている。
(もっと読む)
移植機
【課題】感知体の土圧感知に基づいて植付作業機の対地高さを制御するものにおいて、構成がシンプルで且つハンチングの発生を効率的に抑制できる移植機を提供することを課題とする。
【解決手段】走行機体3と、走行機体3に昇降自在に連結された植付作業機7と、植付作業機7を昇降駆動させる油圧式の昇降シリンダー9と、前記昇降シリンダー9を伸縮作動させる昇降バルブ18と、植付作業機7に設けられ圃場面からの土圧を感知する感知体12と、感知体12の土圧感知に昇降バルブ18の開閉を連動させる連係手段32とを備えた移植機において、非接地高さにある植付作業機7を下降作動させ、植付作業機7が圃場に接地すると、それ以降、感知体12の土圧感知に基づく対地高さ制御中に昇降バルブ18の植付作業機7下降側の開度が全開にならないように規制する規制手段33を設け、植付作業機7の下降スピードを制限する。
(もっと読む)
移植機
【課題】植付に係る複数の作業装置を統括的に操作し、オペレータの負担を軽減し得るようにした移植機を提供する。
【解決手段】乗用田植機に対し、圃場端である枕地における作業にあっては、植付部、油圧制御装置、整地装置、或いはマーカ等の複数の作業部が同時に、枕地での制御状態となるように設定又は警報する1個の枕地スイッチ63を備えさせた。これにより、枕地での植付作業時に生じる複数の作業部の操作を1個の枕地スイッチ63によって統括的に行うことができる。
(もっと読む)
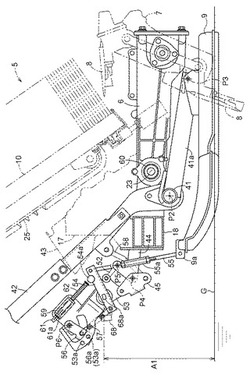
移植機
【課題】整地ロータを油圧モータの駆動力で回転させる移植機において、油圧ポンプの兼用化によりコストダウンを図る。また、同一の油圧ポンプが用いられる複数の油圧回路を効率良く作動させることにより、油圧回路の複雑化や油圧ポンプの容量アップを回避する。
【解決手段】油圧モータ22の駆動力で回転する整地ロータ14を備える乗用型田植機において、整地ロータ用油圧回路26を、整地ロータ14と同時作動しないパワーステアリング用油圧回路25と同一の油圧回路に組み込み、パワーステアリング用油圧ポンプ31を整地ロータ用油圧ポンプに兼用する。
(もっと読む)
乗用型田植機
【課題】 乗用型田植機において、苗植付装置の前部に整地装置を支持した場合、植付設定高さを変更しても(設定深さを変更しても)、田面から整地装置までの高さ(整地深さ)が変化しないように構成する。
【解決手段】 整地装置53を苗植付装置の前部に昇降自在に支持し、整地装置53を苗植付装置に対して昇降駆動するアクチュエータ56を備える。苗植付装置の植付設定高さA1の変更に基づいて、整地装置53が田面Gから整地設定高さA2に維持されるようにアクチュエータ56を作動させる。
(もっと読む)
植え付け作業機の昇降制御構造
【課題】 部品レイアウトに苦慮することなく、又、コストの高騰並びに組み付け性やメンテナンス性の低下を招くことなく、植え付け深さ調節にかかわらず、自動昇降制御において、苗植付装置を予め設定した接地高さ位置に精度良く維持できるようにする。
【解決手段】 操作手段51により、植付機構16に対する接地体17の高さ位置を変更することで植え付け深さが調節され、制御手段40が、揺動角度検出手段54で検出される接地体17の検出角度θbが予め設定した制御目標角度θoと一致するように、苗植付装置昇降用のアクチュエータ2の作動を制御することで、苗植付装置4が予め設定した接地高さ位置に維持されるように構成した植え付け作業機の昇降制御構造おいて、植え付け深さ調節に連動して、揺動角度検出手段54の検出角度θbを補正する補正手段64を備えてある。
(もっと読む)
1 - 13 / 13
[ Back to top ]