
Fターム[2B076EA05]の内容
収穫機本体(機枠、駆動) (12,770) | 駆動機構の自動制御 (620) | 制御の優先順位 (74)
Fターム[2B076EA05]に分類される特許
61 - 74 / 74
作業車の姿勢制御装置
【課題】 車体が旋回走行している状態において走行安定性が低下するおそれを少ないものにしながら、精度よく車体の前後傾斜角を検出して、姿勢変更操作手段による車体の前後傾斜方向での作動制御を良好に行えるようにする。
【解決手段】 前後傾斜角センサ24の検出値のうちの高周波数成分を除去した後の検出値と角速度センサ25の検出値を積分した積分値のうちの低周波数成分を除去した後の積分値とを加算して車体Vの前後傾斜角を求める傾斜角算出手段300を備えて構成され、車体Vが旋回走行状態であることが検出されると、下降傾斜作動を実行し且つ上昇傾斜作動を実行しない形態で、車体Vの水平基準面に対する前後傾斜角が前記設定傾斜角になるように姿勢変更操作手段の作動を制御する下降操作限定処理を実行する。
(もっと読む)
作業車の姿勢制御装置

【課題】 目標傾斜角を所望の傾斜角に調整する操作を煩わしさの少ない状態で容易に行うことが可能となる作業車の姿勢制御装置を提供する。
【解決手段】 走行装置に対する車体Vの傾斜姿勢を変更操作自在な姿勢変更操作手段100が備えられ、姿勢変更制御の実行中において、姿勢変更指令手段60,61にて姿勢変更指令が指令され、その指令が終了すると、指令が終了してから設定待機時間が経過するまでの間車体Vの傾斜姿勢の変更操作を停止させたのち姿勢変更制御を再開するように姿勢変更操作手段100の作動を制御し、且つ、姿勢変更指令の指令が終了したときから設定待機時間よりも短い時間に設定された出力安定化時間が経過したのち設定待機時間が経過するまでの間において、傾斜角検出手段23の検出情報に基づいて目標傾斜角を設定する。
(もっと読む)
作業車の操作制御装置
【課題】 エンジンの始動状態から作業を行うときの操作の簡略化を図ることができる作業車の操作制御装置を提供する。
【解決手段】 操作制御手段Cが、作業指令手段25にて作業開始指令が指令されると、アクセル手段63を前記定格回転状態に操作し且つ作業クラッチ14を前記入り状態に操作するように構成されている作業車の操作制御装置。
(もっと読む)
作業機のモニタ表示装置
【課題】モニタ表示器の表示内容を把握しやすくして作業機の操作性を向上させると共に、コストの低減を図る。
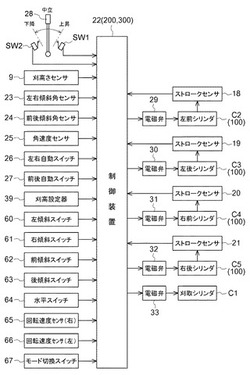
【解決手段】モニタ表示器(12)の表示制御を行なうモニタ表示制御コントローラ(C1)と作業機の作動部を制御する複数の制御コントローラ(C2)とを通信回線によって接続する。そして、表示切換スイッチ(SW1)を操作する毎に、複数の制御コントローラ(C2)からモニタ表示制御コントローラ(C1)へ送信される表示情報を設定された順位に従ってモニタ表示器(12)へ切換表示可能に構成する。更に、表示切換スイッチ(SW1)の操作にもかかわらず、モニタ表示制御コントローラ(C1)へ表示情報が送信されない場合には、当該設定順位の表示情報の表示をとばして次の順位の表示情報の表示へスキップさせる。
(もっと読む)
コンバイン
【課題】ドアの開閉用の専用の操作スイッチがないため、開閉操作とドアのロック・アンロックの操作とを誤認する。
【解決手段】操縦部7の周囲を包囲するキャビン10の一側に乗降口11を形成し、乗降口11のドア15を開閉する駆動源25を、グレンタンク5内の穀粒を排出させる排出オーガ31を操作する遠隔操作器30により操作しうるように構成し、前記キャビン10の所定位置には、前記キャビン10の乗降口11を撮影するカメラ45を設け、該カメラ45による撮影によって前記乗降口11にドア15の閉鎖方向への作動に対する障害物があることが判定された場合には、前記遠隔操作器30が前記ドア15を閉鎖する方向へ前記ドア15を閉扉しないように構成したことを特徴とするコンバイン。
(もっと読む)
コンバイン
【課題】自動方向制御中の自動方向制御の中断および再開のための操作の煩雑化。
【解決手段】操向レバー15により走行方向が操作される左右一対の走行装置2と、該走行装置2の前方に設けられる刈取部5とを有し、走行装置2は刈取部5の各分草体30が互いに隣接する穀稈列の間の株間を通過できるように、植立穀稈を感知する穀稈感知センサ35の信号により自動方向制御され、該自動方向制御は、該自動方向制御実行中に、前記操向レバー15が操向操作されると前記自動方向制御を無効にし、その後、一定時間以上に亘って前記操向レバー15が操向操作されずに刈取作業が行われると、他の手動スイッチ操作をすることなく、自動的に前記自動方向制御が有効となるように構成したコンバイン。
(もっと読む)
穀粒排出装置
【課題】排出オーガを詰まらせることなく、かつ穀粒を損傷せずに排出する穀粒排出装置を提供する。
【解決手段】制御部50は穀粒排出スイッチ51と、エンジン回転センサ52からの信号が入力し、穀粒排出スイッチ51の立ち上がりエッジの際にはエンジン回転センサ52の検出したエンジン回転数が規定回転数以上で穀粒排出用切換え電磁バルブ43を開き、オーガ駆動装置を駆動する。排出オーガの駆動が一旦開始されると、エンジン回転数が低下しても、排出オーガの駆動は維持される。
(もっと読む)
作業機のエンジン制御装置
【課題】 目標回転速度指令手段により目標回転速度を指令することができない異常状態であっても、点検修理を行うまでの間に一時的に作業機を駆動することを可能にして使い勝手を向上することが可能となる作業機のエンジン制御装置を提供する。
【解決手段】 エンジンEの目標回転速度を指令する手動操作式の目標回転速度指令手段40と、エンジンEの回転速度を検出する回転速度検出手段S6と、エンジンEの回転速度を変更調整自在な回転速度調整手段42と、回転速度検出手段S6の検出情報に基づいてエンジンEの回転速度が目標回転速度になるように回転速度調整手段42を制御する制御手段Hとが備えられ、制御手段Hが、目標回転速度指令手段40により目標回転速度を指令することができない異常状態であることを判別すると、エンジンEの回転速度が予め設定された作業用の設定回転速度になるように回転速度調整手段42を制御する異常用代替処理を実行する。
(もっと読む)
コンバイン
【課題】刈取作業工程の終端において扱深調節搬送装置を所定深扱位置に設定することにより、刈り終わり時に穀稈の株元寄りを挟持して稈こぼれを防止したスムーズな搬送を行うコンバインを提供する。
【解決手段】刈取穀稈を前処理部2に備えた扱深調節搬送装置55で扱深調節しながら脱穀装置に搬送供給するコンバインにおいて、前記扱深調節搬送装置55を設定スイッチの操作に基づき、現在の扱深位置を基準として所定量深扱側へ移動する構成とし、上記設定スイッチの操作により所定量深扱側へ移動したのちに、再度設定スイッチを操作しても、扱深調節搬送装置55が所定量深扱側へ移動しないように規制する規制手段を設けると共に、前処理部2に搬送穀稈を検出する搬送穀稈検出センサ70を設け、前記搬送穀稈検出センサ70がOFFからONになると、前記規制手段による規制を解除させる構成とした。
(もっと読む)
コンバインの前処理駆動構造
【課題】前処理部の搬送速度を機体の走行速度に連係させて円滑な刈取収穫作業を行えるものでありながら、機体が停止した状態でも前処理部を駆動可能とし、前処理部に残った穀稈を搬送処理できるコンバインの前処理駆動構造を提供する。
【解決手段】前処理部の搬送速度を、機体の走行速度に連係させて、走行が停止すると前処理部の搬送も停止すると共に、走行速度が速くなるほど前処理部の搬送速度も速くなるように変速する車速同調駆動手段を設けたコンバインの前処理駆動構造において、前処理部の搬送速度を、機体の走行速度に関係なく一定に保持する定速駆動手段を設けると共に、運転操作部に操作具と設定具を設け、前記操作具をON操作すると前処理部が前記定速駆動手段により一定の搬送速度で駆動される一方、前記設定具がONの状態で、且つ機体の走行が停止すると前処理部が前記定速駆動手段により一定の搬送速度で駆動されるように構成した。
(もっと読む)
コンバイン
【課題】回転式の操向操作具に設けた進路変更手段によって進路変更操作を容易・確実にすると共に、立ち作業時の操作性を向上させる。
【解決手段】旋回用の油圧式無段変速装置(40)の回転出力を操向操作具(16)の操作によって調節できるように構成する。そして、操向操作具(16)を左右いずれかに回転操作すると回転操作方向側のホイル軸(30)を減速させて旋回し、該操向操作具(16)を更に回転操作すると左右のホイル軸(30,30)を互いに逆回転させてスピン旋回する構成とする。更に、操向操作具(16)の回転操作によらずに機体を左右に方向修正することのできる進路変更手段(17)を設け、該進路変更手段(17)よりも操向操作具(16)を優先させる。
(もっと読む)
コンバイン
【課題】操向操作具の操作中に進路変更手段を誤操作しても、該進路変更手段の操作よりも操向操作具の操作を優先して進路変更するものとして、操作性を向上させる。
【解決手段】操向操作具(16)を左右いずれかに操作すると片側のホイル軸(30)を減速させて旋回し、更に回転操作すると左右のホイル軸(30,30)を互いに逆回転させてスピン旋回し、操向操作具(16)から手を離すと直進するように構成する。更に、操向操作具(16)の操作中に進路変更手段(17)が操作されても、操向操作具(16)の操作を優先して進路変更することができるように構成する。
(もっと読む)
リモコン操作式コンバインの制御装置
【課題】遠隔操作装置である無線リモコンにより機体の外からその前後進走行を操作する場合について、無線リモコンによる不測の事態を回避して搭乗者の安全を確保することができるリモコン操作式コンバインの制御装置を提供することにある。
【解決手段】リモコン操作式コンバインの制御装置は、操縦席fに配置された機体機器操作用の本体操作具による本体操作具信号および無線リモコン1によるリモコン操作信号に応じて機体の前後進走行動作を制御する制御部11を備えて構成され、上記機体には、搭乗者の不在を検出する無人センサを設け、この無人センサの検出信号を上記制御部11に受けるとともに、同制御部11によりその検出信号を条件に上記リモコン操作信号に対応して機体走行動作を制御するものである。
(もっと読む)
刈高さ制御装置を有するコンバイン
【課題】刈高さセンサの検出値が安定しない圃場において、刈取りオートクラッチ、オートリフト及びオートセット機能が安定して機能し、刈取前処理装置の昇降駆動制御が正常に作動するコンバインを提供する。
【解決手段】スタートに続き、刈高さ自動スイッチがONかOFFかを判別するS1。刈高さ自動スイッチがONの場合S1:ONには、前記刈高さセンサのセンサデータに基づき刈取前処理装置の昇降駆動制御を実行するS2。また、刈高さ自動スイッチがOFFの場合S1:ONには、刈取り位置センサによる昇降駆動制御を実行するS3。刈高さセンサの検出に不都合が生じた場合には、その不作動を判別して、刈取り位置センサの検出信号に基づいて刈取前処理装置の昇降駆動制御が可能になり、刈取りオートクラッチ、オートリフト及びオートセット機能が安定して使うことができる。
(もっと読む)
61 - 74 / 74
[ Back to top ]