
Fターム[2B076EA05]の内容
収穫機本体(機枠、駆動) (12,770) | 駆動機構の自動制御 (620) | 制御の優先順位 (74)
Fターム[2B076EA05]に分類される特許
21 - 40 / 74
コンバイン
【課題】走行機体1の傾斜姿勢が自動的に修正されることを利用して、穀物タン7ク内の穀粒の質量を高精度で計測でき、穀粒の質量の計測誤差を簡単に低減できるようにしたコンバインを提供するものである。
【解決手段】刈取装置3及び脱穀装置5及び穀物タンク7を装設した走行機体1と、走行機体1の左右方向又は前後方向の傾斜姿勢を修正する傾斜姿勢アクチュエータとしての車高調節油圧シリンダ38又は前後傾斜用油圧シリンダ177と、穀物タンク7の質量を計測する計量手段としての計量器399を備えるコンバインにおいて、走行機体1の左右方向又は前後方向の傾斜姿勢が自動的に修正されることによって、走行機体1が水平姿勢に維持されているときに、計量器399によって穀物タンク7の質量が計測されるように構成したことを特徴とする。
(もっと読む)
コンバイン

【課題】車速が高速になるほど刈取部の駆動速度を高速にする一方で、走行停止が検出された場合には刈取部の駆動を停止する車速連動制御を行うコンバインにおいて、穀稈の押倒しを効率的に防止可能なコンバインを提供することを課題とする。
【解決手段】本発明は、走行機体3に連結された刈取部4と、刈取部4への動力を変速する変速装置46と、変速装置46を介して車速検出手段により検出された車速に刈取部4の駆動速度を連動させて、車速が高速になるほど刈取部4の駆動速度を高速にする一方で、走行停止が検出された場合には刈取部4の駆動を停止する車速連動制御を行う制御部58とを備え、傾斜角検知手段61により走行機体3の所定角以上の前傾斜が検出された場合には、車速検出手段により走行停止が検出された際にも、刈取部4が駆動するように制御部58を構成する。
(もっと読む)
コンバイン
【課題】安価で、しかも刈取部の高さの制御が容易な掻込リールを装着したコンバインを提供することである。
【解決手段】機体の前側に配置した穀稈を刈り取る刈取部4の底部に設けた接地を検出する接地センサ40と刈取部4の対機体高さを検出する刈取高さセンサ66と刈取部4を機体に対して昇降自在に装着する昇降シリンダを備え、刈取部4の機体に対する高さを設定する刈取高さ設定ダイヤル52により設定された刈取部4の機体に対する高さに応じて接地センサ40と刈取高さセンサ66による検出値のいずれか一方に基づいて刈取部4の機体に対する高さの制御を行う制御装置60を設けたコンバインであり、刈取部4の機体に対する高さに応じて2つの高さセンサ40,66を使い分けることで制御操作が簡単となり、刈取部4の高さ制御のための部品点数が従来より少なくて済む。
(もっと読む)
コンバインの刈高さ制御装置
【課題】コンバインの刈高さ制御装置において、穀稈の刈高さの変動を少なくし、刈取搬送部の地面への突込みを防止する。
【解決手段】接地センサSE1と刈高さポジションセンサSE2とで刈取搬送部の刈高さを設定機体高さに昇降制御する刈取搬送部昇降制御手段を備え、接地センサSE1が刈取搬送部の地面への接地を検出すると、接地センサSE1が接地検出をしなくなるまで刈取搬送部を所定高さに上昇させる。次いで、上昇後所定時間あるいは所定距離走行した後に、刈取搬送部を設定対機体高さまで低速で下降させるコントローラ20を備える。
(もっと読む)
コンバイン
【課題】低速走行での刈取作業における制御精度のばらつき低減、高速走行での刈取作業におけるハンチング・追従遅れの低減。
【解決手段】走行用静油圧式無段変速装置12と走行速度に同調して刈取装置4を変速駆動する刈取搬送用静油圧式無段変速装置21を設ける。刈取搬送用静油圧式無段変速装置21の回転制御は、車速が所定走行速度より低速のときには、低速モードとして刈取装置4を走行速度に同調させて変速し、車速が所定走行速度より高速のときには、高速モードとして刈取装置4を走行速度に同調させて変速するように制御出力するコントローラ60を設けたことを特徴とするコンバイン。
(もっと読む)
コンバイン
【課題】脱穀部における負荷にかかわらず、脱穀性能および選別性能を維持して、脱穀作業および選別作業の作業効率が低下するのを防止することができるコンバインを提供する。
【解決手段】エンジン27の動力を脱穀部5の扱胴32に伝達するとともに、選別部6に伝達する構成において、脱穀部における負荷を検出し(S1)、その検出した負荷が閾値以上であるか否かを判定する(S2)。検出した負荷が閾値未満であるとき、エンジン27の回転数を第一設定回転数とする(S3)。検出した負荷が閾値以上であるとき、エンジン27の回転数を第一設定回転数よりも大きな第二設定回転数とする(S4)。次に、選別部6の回転数をエンジン27の回転数が第一設定回転数である場合における回転数で保たれるように制御する。
(もっと読む)
コンバイン
【課題】圃場の枕地での方向転換又は手扱ぎ作業等において、脱穀装置の駆動によってエンジンの出力が無駄に消費されるのを防止でき、エンジンを大型化することなく走行駆動力を確保できるようにしたコンバインを提供する。
【解決手段】走行部2を有する走行機体と走行機体に搭載したエンジン20と刈取装置3と扱胴226及び選別機構227,228を有する脱穀装置5を備え、エンジンの動力を扱胴に伝達する駆動経路中に扱胴調速手段74を設けたコンバインにおいて、脱穀装置から排出される排藁を検出する排藁センサ106を備える構造であって、排藁がなくなったことを排藁センサ106が検出したときに、排藁センサ106の検出結果に基づき扱胴と選別機構をそれぞれ停止制御するように構成した。
(もっと読む)
コンバイン
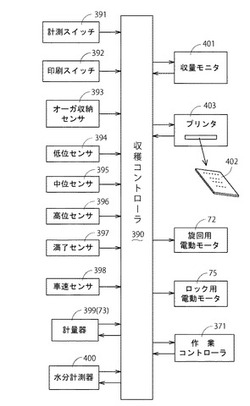
【課題】穀稈を刈取る刈取部及び刈り取った穀稈を脱穀する扱胴の作動状態に基づいて、刈取モードにあるのか、手扱モードにあるのか又は待機モードにあるのかを判定し、穀粒タンクへ搬送される穀粒量に応じて閾値を設定し、各モード及び設定した閾値に基づいて、送塵口等から排出される穀粒量を制御するコンバインを提供する。
【解決手段】刈取スイッチ82、脱穀スイッチ81、穀桿センサ9及び速度センサ43からの出力をコントローラ90へ入力して、刈取モード、手扱モード又は待機モードを判断する。また穀粒タンクへ穀粒を送出する投口に投口センサ23bを設け、排塵口及び排気通路に排出量センサ34を設け、コントローラ90は刈取モード時に投口センサ23bの出力に基づいて閾値を設定し、排出量センサ34にて検出された穀粒量と閾値とを比較し、比較結果に基づいて排塵口及び排気通路から排出される穀粒量を低減させる制御を行う。
(もっと読む)
コンバイン
【課題】変速または操向操作検出手段と、これらの操作に基づいて油圧式無段変速装置を制御する制御装置と、に関わる何らかの異常が生じた場合は、走行を即座に停止することができるコンバインを提供することを目的とする。
【解決手段】第一変速操作検出手段141aと第一操向操作検出手段151aの検出情報に基づく入力情報に応じて制御情報を生成して、走行用の油圧式無段変速装置40と操向用の油圧式無段変速装置50とを制御可能とする第一制御装置200と、第二変速操作検出手段141bと第二操向操作検出手段151bの検出情報に基づく入力情報に応じて制御情報を生成する第二制御装置300とを備え、それぞれの入力情報と制御情報とを互いに比較するとともに、それぞれの作動状態を判定し、一致しない場合は、前記走行用の油圧式無段変速装置40ならびに前記操向用の油圧式無段変速装置50を制御して走行を停止するようにした。
(もっと読む)
コンバイン
【課題】走行用HSTが可変容積型ポンプ及び可変容積型モータを備え、前記モータが小容積状態及び大容積状態間で切替可能とされたコンバインの傾斜地での走行安全性を向上させる。
【解決手段】制御装置は、傾斜センサからの信号に基づき機体の傾斜角度が所定値を越えていると判断する場合には、走行モード切替操作部材からの人為操作信号、好ましくは、高速モード選択信号のみを無視するように構成される。他態様においては、制御装置は、傾斜センサからの信号に基づき機体の傾斜角度が所定値を越えていると判断する場合には、走行モード切替操作部材からの人為操作信号に拘わらず、前記モータが大容積状態となるように走行モード切替作動機構を強制的に作動させる。
(もっと読む)
刈取収穫機
【課題】走行機体に刈取部が上昇非作業高さと下降作業高さとに昇降操作自在に連結され、走行機体の走行装置を変速駆動する走行変速装置を備えた刈取収穫機において、刈取部の接地トラブルを回避しながら高速移動されるようにする。
【解決手段】刈取部の走行機体に対する連結高さを検出する連結高さセンサ61、走行変速装置7が設定低速位置から増速操作されることを牽制する牽制作用状態と、走行変速装置が設定低速位置から増速操作されることを許容する牽制解除状態とに切り換え自在な変速牽制手段77を備えてある。刈取部が設定連結高さより高い連結高さに位置する状態において変速牽制手段77が牽制解除状態に切り換わり、刈取部が設定連結高さ以下に位置する状態において変速牽制手段77が牽制作用状態に切り換わる。
(もっと読む)
コンバイン
【課題】手扱ぎ作業時に、機体の操作を行うことが可能であるとともに、誤操作を防止することができるコンバインを提供する。
【解決手段】コンバインは、エンジンを搭載した走行機体と、刈取部と、脱穀装置と、リモートコントローラ90と、コントローラ装着部91と、機能切替スイッチ98と、を備える。リモートコントローラ90は、走行機体の前進操作及び後進操作が少なくとも可能である。コントローラ装着部91は、リモートコントローラ90を着脱可能に装着可能である。機能切替スイッチ98は、リモートコントローラ90がコントローラ装着部91に装着されたことを検出する。そして、リモートコントローラ90による操作は、当該リモートコントローラ90がコントローラ装着部91に装着されたことを機能切替スイッチ98が押されることで検出した場合にのみ有効となる。
(もっと読む)
刈取収穫機
【課題】走行機体に刈取部が上昇非作業高さと下降作業高さとに昇降操作自在に連結され、刈取部に対する伝動を入り切りする刈取クラッチ、走行機体の走行装置を変速駆動する走行変速装置を備えた刈取収穫機において、移動走行を行なう作業形態を採用して作業を行うに当たり、能率よくかつ操作簡単に行なうことができるようにする。
【解決手段】刈取クラッチ17と走行変速装置7とを連係させた連係手段71を備えてある。連係手段71は、刈取クラッチ17を入り状態に切り換える操作によって走行変速装置7を設定高速位置から減速操作させる。
(もっと読む)
コンバインのクラッチ操作装置
【課題】刈取系のクラッチと穀粒搬出用クラッチとを備えるコンバインにおける各クラッチの入り切り制御を誤操作少なく、かつ迅速に行えるようにする。
【解決手段】刈取クラッチ30が入り状態であると前記穀粒搬出用クラッチ50の入りを阻止し、前記穀粒搬出用クラッチ50の入り状態で前記刈取クラッチ30が入り操作されると、これに伴って前記穀粒搬出用クラッチ50を切り状態に切換操作する制御手段101を備えた。
(もっと読む)
脱穀機
【課題】ストローラックへ多量の穀粒が送出され、ストローラックから穀粒が飛散して、送塵口から排出されることを防ぐと共に、ストローラックから漏下した穀粒が二番スクリューを介して処理ロータに送出され、処理ロータに送出された穀粒が再びストローラックに漏下するという循環をコンバインの機内で繰り返すことを防ぐ。
【解決手段】クリンプ網15の後端部下方に穀粒量検出センサ34を設け、該穀粒量検出センサ34にて検出された検出結果に基づいて、送塵弁10a及びチャフシーブ18の動作を制御して、チャフシーブ18から漏下する穀粒量を増加させて、チャフシーブ18からストローラック19へ送出される穀粒の量を低減させる構成とした。
(もっと読む)
脱穀機
【課題】排塵口から排出される穀粒量が、排塵口から排出されることが許容される穀粒量を超過することを未然に防ぐ。
【解決手段】扱室10から排塵口33に至る穀粒の通流経路において、排塵口33よりも上流に位置する処理室13の排出口13eに穀粒量検出センサ34を設け、該穀粒量検出センサ34にて検出された検出結果に基づいて、送塵弁10a及び処理胴弁13aの動作を制御し、前記処理室13への稈及び穀粒の送出量及び排出口13eから排出される穀粒量を低減させる構成とした。
(もっと読む)
脱穀機
【課題】グレンシーブから多量の穀粒が横溢し、横溢した穀粒が二番スクリューを介して処理ロータに送出され、処理ロータに送出された穀粒が再びグレンシーブに漏下するという循環をコンバインの機内で繰り返すことを防ぐ。
【解決手段】グレンシーブ20の後端下方に穀粒量検出センサ34を設け、該穀粒量検出センサ34にて検出された検出結果に基づいて、送塵弁10a及び調整網94の動作を制御し、またシーブ板の動作を制御して、グレンシーブ20から漏下する穀粒量を増加させ、グレンシーブ20の後端から多量の穀粒が横溢することを防ぐ構成とした。
(もっと読む)
コンバイン
【課題】クローラ走行跡に水が溜まり難くして、クローラ走行跡の土壌の軟弱化を防止し、圃場の走行性を向上させる。
【解決手段】左右一対のクローラ走行装置17を備えるコンバイン1において、各クローラ走行装置17の後方に、圃場のクローラ走行跡に排水用の溝を形成する溝切装置24を設ける。これにより、クローラ走行跡に確実に排水用の溝を形成することができ、その結果、クローラ走行跡に水が溜まり難くなる。また、溝切装置24は、機体に対して昇降可能に設けると共に、前処理部2の昇降に連動して自動的に昇降制御される。これにより、オペレータの操作負担を軽減できるだけでなく、圃場端で機体を回行するときに溝切装置24が破損する不都合も回避できる。
(もっと読む)
コンバイン
【課題】燃料消費量の節減、エンジンによる騒音の低減、排気ガスの減少による雰囲気の清浄化によって、住環境の保全に寄与すると共に、穀粒排出作業の能率を高め、収穫作業全体の能率を向上させる。
【解決手段】排出クラッチ(95)を介して入力されるエンジン(68)の駆動力と排出クラッチ(95)を介することなく入力される電動モータ(83)の駆動力とのうち、他方よりも高速回転となった側の駆動力を穀粒排出装置(5a)側へ出力する伝動切換装置(69)を設け、電動モータ(83)の駆動力による穀粒排出装置(5a)の駆動を起動操作した場合に、エンジン(68)を自動的に停止させる制御装置(111)を設ける。また、電動モータ(83)の駆動力による穀粒排出装置(5a)の駆動を停止操作した場合に、エンジン(68)を自動的に始動させる制御装置(111)を設ける。
(もっと読む)
コンバイン
【課題】燃料消費量の節減、エンジン停止による騒音の低減、排気ガスの減少による雰囲気の清浄化によって、住環境の保全に寄与すると共に、穀粒排出作業の中断をなくして収穫作業全体の能率を高める。
【解決手段】排出クラッチ(95)を介して入力されるエンジン(68)の駆動力と排出クラッチ(95)を介することなく入力される電動モータ(83)の駆動力とのうち、他方よりも高速回転となった側の駆動力を穀粒排出装置(5a)側へ出力する伝動切換装置(69)を設け、蓄電池(109)の電圧を検出する電圧検出手段を設け、電動モータ(83)の駆動力によって穀粒排出装置(5a)を駆動している状態で、電圧検出手段によって設定電圧よりも低い電圧が検出された場合に、排出クラッチ(95)を自動的に接続してエンジン(68)の駆動力で穀粒排出装置(5a)を駆動する制御装置(111)を設ける。
(もっと読む)
21 - 40 / 74
[ Back to top ]