
Fターム[2B076EA05]の内容
収穫機本体(機枠、駆動) (12,770) | 駆動機構の自動制御 (620) | 制御の優先順位 (74)
Fターム[2B076EA05]に分類される特許
41 - 60 / 74
コンバインの変速制御装置
【課題】走行装置が走行しているのにも拘わらず故障等により実走行速度検出手段が零を出力することがあっても、走行連係変速処理によって刈取処理装置を駆動することが可能なコンバインの変速制御装置を提供する点にある。
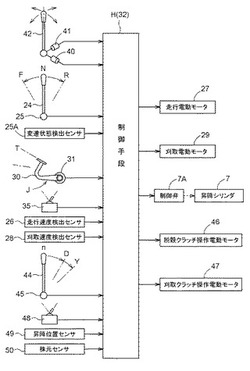
【解決手段】走行装置と一体回転する回転体に検出作用して前記走行装置の走行速度を検出する実走行速度検出手段26の検出情報に基づいて、刈取処理装置の駆動速度を走行装置の走行速度が高速となるほど高速にする関係にて定めた設定関係速度にするように変速手段を変速操作する走行連係変速処理を実行する変速制御手段Hが、実走行速度検出手段26にて検出される走行速度が零のときには、走行変速操作具24にて指令されて目標速度検出手段25にて検出される目標走行速度を走行速度として、走行連係変速処理を実行するように構成されている。
(もっと読む)
作業機等の油圧制御回路

【課題】油圧制御ブロックを小さなブロックで分離可能にしてメンテナンスの能率を高める。
【解決手段】左側走行装置の駆動と制動を左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lで制御し、右側走行装置の駆動と制動を右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rで制御する回路であって、左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lを制御する左クラッチ切換電磁弁14Lと左パイロット圧切換電磁弁16Lと左電磁比例弁17Lを一体に組み込んだ左油圧制御ブロック35Lと、右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rを制御する右クラッチ切換電磁弁14Rと右パイロット圧切換電磁弁16Rと右電磁比例弁17Rを一体に組み込んだ右油圧制御ブロック35Rを各別の回路にする。
(もっと読む)
コンバイン
【課題】燃料消費量の節減、エンジン停止による騒音の低減、排気ガスの減少による雰囲気の清浄化によって、住環境の保全に寄与すると共に、穀粒排出作業の中断をなくして収穫作業全体の能率を高める。
【解決手段】蓄電池(109)の電圧を検出する電圧検出手段を設け、該電圧検出手段によって設定電圧よりも高い電圧が検出されている状態で駆動源自動切換式排出スイッチ(114)が入り操作された場合に、排出クラッチ(95)を遮断状態に維持したまま電動モータ(83)を駆動して穀粒排出装置(5a)を駆動させ、電圧検出手段によって設定電圧よりも低い電圧が検出されている状態で駆動源自動切換式排出スイッチ(114)が入り操作された場合には、電動モータ(83)を停止させたまま排出クラッチ(95)を自動的に接続してエンジン(68)の駆動力で穀粒排出装置(5a)を駆動する制御装置(111)を設ける。
(もっと読む)
コンバイン
【課題】刈取部への同調させる走行速度と、移動速度との切替等の走行操作の不便性、作業性の低下。
【解決手段】無段階に変速可能な走行装置3の前方に刈取部4を設け、走行装置3の上方に脱穀装置2を設ける。刈取部4は、走行装置3の無段変速装置12の油圧ポンプ14のポンプ斜板15の傾斜角度を調節する主変速レバー13の傾倒操作により、走行速度に同調して変速駆動する構成とする。前記無段変速装置12の油圧モータ16のモータ斜板17の傾斜角度は通常走行側と高速走行側とへ切替可能に構成する。モータ斜板17の傾斜角度が低速走行側に切替えられた状態で、前記主変速レバー13が最高速位置に操作されたときの車速を変更調節する速度調整ダイヤル51を設ける。
(もっと読む)
作業車の操作制御装置
【課題】作業クラッチを誤って入り操作することを抑制して、エンジンの始動を良好に行えるようにし、しかも、エンジンを起動しない状態でのメンテナンス作業を良好に行える作業車の操作制御装置を提供する。
【解決手段】操作制御手段Cが、作業指令手段25にて作業開始指令が指令されたときに、起動状態検出手段100にてエンジン起動状態が検出されていると、作業クラッチを入り状態に操作する作業モードに切り換り、かつ、起動状態検出手段100にてエンジン起動状態が検出されていないと、作業モードに切り換らないように構成され、且つ、起動状態検出手段100にてエンジン起動状態が検出されていないときに、補助指令手段50による補助作業指令が指令されると、作業モードに切り換るように構成されている作業車の操作制御装置。
(もっと読む)
コンバイン
【課題】作業中における騒音及び燃料の削減を図る。
【解決手段】少なくとも走行部7及び脱穀部3をエンジンEの動力で動作させるコンバイン1であって、エンジンEの回転数を調整するエンジン回転調整手段32と、脱穀部3に伝動するエンジン動力を無段階に変速する脱穀用無段変速装置25と、エンジン回転調整手段32及び脱穀用無段変速装置25を電気的に制御する制御装置33とを備え、該制御装置33は、作業中であっても、車速の増減に応じてエンジン回転数を増減させると共に、エンジン回転数の増減に拘わらず脱穀部回転数が一定となるように脱穀用無段変速装置25を制御する。
(もっと読む)
コンバインの姿勢制御装置
【課題】機体の左右姿勢を制御する姿勢制御装置を備えたコンバインにおいて、姿勢制御装置の目標傾斜角を設定する設定器であるダイヤルを他部品の兼用化により廃止してコストの低減を図る。
【解決手段】機体の左右姿勢が設定傾斜となるようにクローラ走行装置16L,16Rを昇降制御する自動傾斜制御と、該自動傾斜制御に優先して手動操作具65によりクローラ走行装置16L,16Rを昇降制御する手動傾斜制御とを可能にする制御手段41,61とを備え、前記自動傾斜制御での作業走行中に手動操作具65の操作を行った時は、その操作を終了した時点における機体の左右姿勢を設定傾斜とする傾斜設定モードとして自動傾斜制御に復帰せしめると共に、前記傾斜設定モードでの作業走行中に自動傾斜制御の起動手段62を操作すると、傾斜設定モードから機体の水平姿勢を設定傾斜とする水平設定モードへ自動的に切換えて自動傾斜制御を継続するように構成した。
(もっと読む)
脱穀機
【課題】穀粒の選別精度の向上とロス量の低減との調和を図り、また穀粒を検出する手段に不具合が発生した場合でも、穀粒及び塵埃の選別をするフィン同士の間隔及び唐箕の風量の調節を継続して行うことができる脱穀機を提供する。
【解決手段】コンバインの速度及び許容ロス量の関係を示す複数の関数から一の関数を選択するためのボリュームスイッチを設け、選択された関数を参照して、ロスセンサにより検出されたロス量が前記許容ロス量以上であるか否か判断し、ロス量が前記許容ロス量以上である場合に、前記サーボモータ70を動作させて、ロス量を減少させる。またサーボモータ70が動作しない場合には、排桿の押圧による排ワラガイド棒51、ばね体54及び回動レバー52等の動作により、フィン18a同士の間隔及び唐箕の風量の調節を継続する構成とした。
(もっと読む)
コンバイン
【課題】刈取部の各駆動部を個別に駆動することができるコンバインを提供する。
【解決手段】
刈取部の各駆動部は、それぞれ駆動軸に電動モータをそれぞれ配設しているので、各駆動部を電動モータにより個別に駆動することができ、部品数を少なくして駆動系を簡単化することができる。また、電動モータから直に各駆動部に動力を伝達しているので、動力の伝達効率が向上する。さらに、各駆動部を個別に駆動することができるので、各駆動部に個別にメンテナンスしたい場合などの作業性が向上する。
(もっと読む)
脱穀機
【課題】刈取部にて刈取った穀桿を脱穀部に搬送している状態にあるのか(刈取モード)、手刈りした穀桿を搬送している状態にあるのか(手扱モードという)、又は穀桿の脱穀部への搬送を行っていない状態にあるのか(待機モード)を判断し、各モードに応じて、穀桿から分離した穀粒及び塵埃を選別する選別部での選別精度を機械的及び自動的に調整し、ロス量を低減させる。
【解決手段】排桿量に応じて機械的に回動する回動レバー52に、サーボモータ70を連結する。刈取スイッチ、脱穀スイッチ、穀桿センサ及び速度センサから出力された信号をコントローラに入力して、入力された信号に基づいて、刈取モード、手扱モード又は待機モードを判断する。コントローラは、各モードに応じてサーボモータ70を作動させて、機械的及び自動的に回動レバー52を回動させる構成とした。
(もっと読む)
脱穀機
【課題】品種及び圃場条件に対応した脱穀作業を行い、穀粒の選別精度の向上と、塵埃と共に排出される穀粒量(ロス量)の低減との調和を図ることができる脱穀機を提供する。
【解決手段】コンバインの速度及び最低限確保されるべきフィン角の関係を示す複数の関数から一の関数を選択するためのボリュームスイッチを設け、ユーザがボリュームスイッチを操作して、品種及び圃場条件に対応した一の関数を選択する。選択された関数を参照して、コンバインの速度に基づいて回動レバー52を動作させ、フィン角rを調整し、吸気口55を開閉するシャッタ57の動作を調整する構成とした。
(もっと読む)
コンバイン
【課題】従来のコンバインは、自動的に刈取部が地面に追従して接地可能となっていると、刈取作業を行っていない場合においてまでも、刈取部が意図せず下降する、という問題があった。
【解決手段】刈取部6が地面に接地しているか否かを検知する接地検知センサ57と、刈取部6を昇降操作する上昇・下降操作スイッチ51・52と、を備え、制御部60は、刈取作業時に、接地検知センサ57によって刈取部6が地面に接地していないことを検知すると、刈取部6が下降する自動制御モードと、刈取作業時に、上昇・下降操作スイッチ51・52の昇降操作によって刈取部6が昇降する手動制御モードと、を切替可能に備え、自動制御モードである場合に、コンバインのエンジン10から刈取部6への動力を断接する刈取クラッチ37が切状態になると、手動制御モードに切り替わる。
(もっと読む)
芝管理用車両全輪駆動システム
【課題】芝管理用車両の全輪駆動牽引制御システムで、タイヤのスリップを防止するシステム。
【解決手段】芝管理用車両10の全輪駆動牽引制御システム110が、車両を推進させる主輪を含む。第1モータが、主輪34,34’を回転させる。牽引制御システムは、第1モータ80電流要求または主輪もしくは第1モータの回転速度のいずれかを監視する第1モータと通信する第1部分を有し、牽引制御値を生成する。第2モータ90によって回転させられる副輪28は、車両を、車両非スリップ状態で操舵する。牽引制御システムの第2部分が、副輪の操舵角αの値を決定する。牽引制御値と比較され、牽引制御システムに記憶される速度限界値が、主輪牽引力損失事象を示すスリップ発生メッセージを生成する。操舵角の値とスリップ発生メッセージとを比較することによって生成された第2モータ駆動信号が、牽引力損失事象中、第2モータに電力供給する。
(もっと読む)
収穫機
【課題】圃場の作物の性状等に適応した速度で作物搬送手段(穀稈搬送装置)を作動でき、作物搬送手段の搬送性能を向上できるようにした収穫機を提供するものである。
【解決手段】エンジン14によって作動する走行部を備えた走行機体と、圃場に植立した作物の株元を切断する刈刃装置と、刈刃装置によって株元が切断された前記作物を搬送する作物搬送手段とを備えてなる収穫機において、作物搬送手段を作動する搬送駆動用電動モータ92と、刈刃装置等への入力回転数を検出する回転センサ288と、搬送駆動用電動モータ92の回転数を変更可能な搬送速度設定器262とを備え、回転センサ288の検出結果に基づき搬送駆動用電動モータ92の回転数を制御中、オペレータが搬送速度設定器262を手動操作し、搬送駆動用電動モータ92の出力回転数を変更して作物搬送手段の搬送速度を調整可能に構成したものである。
(もっと読む)
収穫機
【課題】作物搬送手段の作動負荷に適応した車速で走行機体を移動でき、作物搬送手段の搬送性能を維持して、作物の搬送姿勢が乱れたり、作物が詰るのを未然に防止できるようにした収穫機を提供するものである。
【解決手段】エンジン14によって作動する走行部を備えた走行機体と、圃場に植立した作物の株元を切断する刈刃装置と、刈刃装置によって株元が切断された前記作物を搬送する作物搬送手段と、走行機体の移動速度を検出する車速センサ285と、走行機体の移動速度を変更する車速変更手段112とを備えてなる収穫機において、作物搬送手段を作動する搬送駆動用電動モータ92と、作物搬送手段の作動負荷を検出する負荷センサ313とを備え、作物搬送手段224の作動負荷が設定負荷以上に増加したときに、負荷センサ313の検出結果に基づき、車速変更手段112を制御して、走行機体の移動速度を減速するように構成したものである。
(もっと読む)
収穫機
【課題】作物搬送手段の作業速度(車速)や圃場の作物の性状等に適応した速度で刈刃装置を作動でき、刈刃装置の切断性能を向上できるようにした収穫機を提供するものである。
【解決手段】エンジン14によって作動する走行部を備えた走行機体と、圃場に植立した作物の株元を切断する刈刃装置と、刈刃装置によって株元が切断された前記作物を搬送する作物搬送手段とを備えてなる収穫機において、刈刃装置を作動する刈刃駆動用電動モータ91と、作物搬送手段への入力回転数を検出する回転センサとを備え、回転センサの検出結果に基づき刈刃駆動用電動モータ91の回転数を制御中、切断性能を維持可能な所定の速度で刈刃装置を作動させるように構成したものである。
(もっと読む)
刈取収穫機
【課題】 走行機体の水平基準面に対する前後傾斜角を設定傾斜角に維持しながら刈取作業を行うことが可能なものでありながら、刈取部が地面に突っ込むおそれを少なくすることが可能な刈取収穫機を提供する。
【解決手段】 刈取部10の対地高さが制御目標高さになるように刈取シリンダC1の作動を制御する刈取昇降制御並びに走行機体Vの水平基準面に対する前後傾斜角が設定傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段が、刈取部10が地面に近付く形態で走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させているときは、目標対地高さ設定手段にて設定される目標対地高さに対応させて定めた基準対地高さよりも前傾斜操作用設定量だけ高い値を制御目標高さとして定め、走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させていないときは基準対地高さを制御目標高さとして定める。
(もっと読む)
コンバイン
【課題】手扱作業部近傍で機体を左下がり傾斜させることで、手扱作業の能率を向上する。
【解決手段】機体に対して左右のクローラ走行装置(5,5)を独立して昇降するクローラ昇降装置(31,32)と、機体の左右傾斜角度を検出する傾斜角度検出手段(44)の検出または運転操作部(4)に設けた手動傾斜操作手段(48)の検出に基づき、クローラ昇降装置(31,32)を昇降制御して機体の左右傾斜または車高を制御する傾斜制御手段(41)を備え、脱穀部(3)に手扱作業部(11)を備えたコンバインにおいて、前記手扱作業部(11)の近傍に左傾斜操作手段(15)を設け、左傾斜操作手段(15)を操作すると機体が左下がり傾斜姿勢となるように、左傾斜操作手段(15)と前記傾斜制御手段(41)とを連係させると共に、機体が左下がり傾斜姿勢となる時に前処理部(2)の下部が地面に突っ込むのを防止する突っ込み防止手段を設けた。
(もっと読む)
コンバイン
【課題】穀粒の排出装置を備えて成るコンバインにおいて,穀粒の排出の際における燃料の節減を図る。
【解決手段】走行装置2と刈取装置3と脱穀装置5とを駆動しての走行刈取脱穀作業,脱穀装置5のみを駆動しての脱穀作業,及び,走行装置2のみを駆動して走行作業のときには,エンジン14の出力を,エンジンコントローラ14aにて,走行装置2,刈取装置3及び脱穀装置5の各々を最適回転数で駆動するという定格回転数に維持するように制御しているが,エンジンコントローラ14aは,排出装置8のみを駆動して排出作業を行うときにおいて,前記エンジン14の出力を,前記定格回転数に維持するときにおけるエンジン出力よりも低くするように制御する機能を備えている。
(もっと読む)
作業車の姿勢制御装置
【課題】 車体が旋回走行している状態において走行安定性が低下するおそれを少ないものにしながら、精度よく車体の前後傾斜角を検出して、姿勢変更操作手段による車体の前後傾斜方向での作動制御を良好に行えるようにする。
【解決手段】 前後傾斜角センサ24の検出値のうちの高周波数成分を除去した後の検出値と角速度センサ25の検出値を積分した積分値のうちの低周波数成分を除去した後の積分値とを加算して車体Vの前後傾斜角を求める傾斜角算出手段300を備えて構成され、車体Vが旋回走行状態であることが検出されると、下降傾斜作動を実行し且つ上昇傾斜作動を実行しない形態で、車体Vの水平基準面に対する前後傾斜角が前記設定傾斜角になるように姿勢変更操作手段の作動を制御する下降操作限定処理を実行する。
(もっと読む)
41 - 60 / 74
[ Back to top ]