
Fターム[2B304MC14]の内容
Fターム[2B304MC14]に分類される特許
1 - 20 / 20
乗用移植機
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
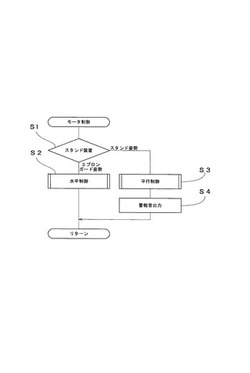
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
トラクタ作業機の制御装置

【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
対地作業部付き作業車両
【課題】手動昇降用のポジションレバーおよび自動昇降用の操作パネルに起因する対地作業部の予期せぬ昇降動作を回避して安全な昇降制御を可能とする対地作業部付き作業車両を提供する。
【解決手段】対地作業部付き作業車両は、手動昇降用のポジションレバー(21a)と自動昇降用の操作パネル(22)のそれぞれの指示に沿って対地作業部(41)の保持高さを昇降制御する作業機制御部(C1)と、車両起動当初における対地作業部(41)の昇降制御を規制するセフティ機構と、このセフティ機構による規制をポジションレバー(21a)の所定の予備操作によって解除する解除手段とを備えて構成され、上記作業機制御部(C1)は、車両起動時に操作パネル(22)の信号の異常があった場合に、ポジションレバー(21a)の指示に沿って対地作業部(41)の保持高さを昇降制御する制御処理を備えたものである。
(もっと読む)
トラクタ
【課題】エンジン始動時の傾斜自動制御を禁止すると共に、複雑な禁止解除操作を行うことなく傾斜自動制御を有効にし、速やかな作業再開を可能にする。
【解決手段】制御装置32に、昇降スイッチレバー23の操作に応じて電動モータ25を駆動制御することにより、作業機を所定の上昇位置及び下降位置まで昇降作動させる昇降スイッチ制御手段と、走行機体1又は作業機の左右傾斜に応じて傾斜制御バルブ14を切り換え制御することにより、作業機を自動的に傾斜作動させる傾斜自動制御手段とを設けたトラクタにおいて、昇降スイッチ制御手段は、電動モータ25から出力されるパルスに基づいてモータ作動体の位置を特定可能であって、エンジン始動時に傾斜自動制御を禁止する傾斜自動禁止手段と、所定の作業機昇降操作に応じて傾斜自動制御の禁止を解除する傾斜自動禁止解除手段とを備える。
(もっと読む)
苗移植機
【課題】畦越えなどしようとして、苗植付装置を上昇させるときにエンストを起こさないようにすることができる苗移植機を提供すること。
【解決手段】車体の後側に昇降リンク装置2を介して昇降可能に装着された苗植付装置3を接地する作業位置まで下降させる操作と対地浮上する所定の非作業位置まで上昇させる操作が行える昇降操作装置110bと苗植付装置を任意の高さに上昇させることができる任意上昇操作装置110cを設け、任意上昇操作装置110cを操作すると、その上昇操作量に応じてエンストさせないようにエンジン12のアイドリング回転数を上昇させ、昇降操作装置110bを操作するとエンジンのアイドリング回転数を上昇させる作動状態であると、それを解除してアイドリング回転から元の通常回転に戻るようにしたので、畦越えしながらの植付時、エンジン12のアイドリング回転数が上昇するので、走行負荷に対処でき、エンストを防止できる。
(もっと読む)
作業車
【課題】作業装置の作動形態を設定しての制御を終了した後、再び元の作動形態での制御を行う際や、作業装置の作動形態の設定を行ってから、再度の作動形態の設定を行う際の操作を簡便に行えるようにする。
【解決手段】制御手段101,102,103,104,105による制御作動の入り状態と切り状態とを択一選択可能な切換スイッチ67による制御作動の切り操作に基づいて、制御手段101,102,103,104,105による制御の終了時点における作動形態を不揮発性メモリに記憶する記憶手段106を備え、かつ、切換スイッチ67による制御作動の入り操作に基づいて、各作業装置5,11,30,31を記憶手段106に記憶された作動形態に復元させる。
(もっと読む)
移植機
【課題】植付作業機の上昇操作を行う上昇操作具を変速レバーの把持部に設けて操作性を向上させた移植機において、オペレータの意図しない植付作業機の上昇を防止することを課題とする。
【解決手段】本発明は、走行機体3の後部に昇降可能に連結された植付作業機7と、植付作業機7の昇降制御を行う制御部23と、走行変速操作を行う変速レバー18の把持部18aに設けられて植付作業機7の上昇操作を行う上昇操作具24とを備えた移植機において、走行速度を検出する速度検出手段41を設け、制御部23が、上昇操作具24の植付作業機7上昇操作による植付作業機7の上昇作動を規制する規制モードを有し、速度検出手段41によって走行速度が所定速度以上になったことが検出されると、上記規制モードから、上昇操作具24の植付作業機7上昇操作による植付作業機7の上昇作動を許容する許容モードに移行する。
(もっと読む)
作業車のリフトアーム昇降構造
【課題】作業車のリフトアーム昇降構造において、キースイッチのOFF位置からON位置への操作後で且つエンジンの始動操作前の状態で、昇降操作具が誤って上昇側又は下降側に操作されてしまった場合、作業者の誤解を招かないように構成する。
【解決手段】キースイッチ43のOFF位置からON位置への操作後で、且つエンジンの始動操作前において、昇降操作具23が上昇側に操作されても、制御手段36による制御弁11の上昇側への操作が阻止される。エンジンの始動操作後において、昇降操作具23が上昇側に操作されると、制御手段36による制御弁11の上昇側への操作が許容される。
(もっと読む)
作業車
【課題】複数の制御手段を備えた作業車において、各種の作業に対応するように制御手段を選択する場合、制御手段の選択が容易に行えるように構成する。
【解決手段】複数の制御手段と、制御手段の状態を人為的に変更可能な設定操作具とを備える。複数の制御モードM1,M2を備え、制御モードM1,M2の各々において制御手段の状態を記憶可能に構成し、制御モードM1,M2に記憶された状態を設定操作具により変更可能に構成する。複数の制御モードM1,M2のうちの一つを人為的に選択する選択手段67を備え、選択手段67により選択された制御モードM1,M2の状態に基づいて制御手段が作動するように構成する。
(もっと読む)
作業車輌
【課題】各種昇降制御及び駆動制御が停止された走行モードにあっても、駆動制御の一部を変更し得る変更手段を備えた作業車輌を提供する。
【解決手段】トラクタ1は、作業機10の各種昇降制御及び走行機体5の各種駆動制御をそれぞれ各別に変更設定する設定手段(スイッチ)と、該設定手段により設定された状態で一括作動する作業モードとこれら各種昇降制御及び駆動制御を停止する走行モードとに切換えるおまかせスイッチとを備える。制御モードが走行モードに選択された状態であっても、四駆切換えスイッチによって、二輪駆動から四輪駆動に切換えることができるように構成する。これにより、走行状況に応じた適正な制御に変更できる。
(もっと読む)
農作業機
【課題】走行機体に動力を供給する動力源の駆動及び走行機体に連結してある作業機の作動を制御する複数の制御方法を適宜選択し、操作性及び利便性を向上させることができる農作業機を提供する。
【解決手段】耕耘機制御装置は前記作業モード切替スイッチが押下されたことを示す信号が入力され(ステップS1)該スイッチにより選択された作業モードが通常モードであるときは(ステップS2)所定のランプを点灯させて通常モードでの制御を行う(ステップS3、S4、S5)。選択された作業モードが枕地モードであるときは(ステップS6)所定のランプを点灯させて枕地モードでの制御を行う(ステップS7、S8、S9)。選択された作業モードが走行モードであるときは(ステップS6)所定のランプを消灯させて走行モードでの制御を行う(ステップS10、S11、S12)。
(もっと読む)
作業車のPTOクラッチ操作構造
【課題】 作業車のPTOクラッチ操作構造において、昇降レバー及びポジション制御手段を備えた場合、作業装置の昇降駆動に応じてPTOクラッチを適切に伝動及び遮断状態に操作することができるように構成する。
【解決手段】 所定範囲A1に亘って人為的に操作される昇降レバー12を備えて、ポジション制御手段を備える。所定範囲A1の上限位置A3よりも少し下降側にPTO切換位置A4,A5を設定する。昇降レバー12がPTO切換位置A4,A5よりも下降側に位置すると、PTOクラッチ29を伝動状態に操作し、昇降レバー12がPTO切換位置A4,A5よりも上昇側に位置すると、PTOクラッチ29を遮断状態に操作する。昇降レバー12がPTO切換位置A4,A5を越えて下降側に操作される際の操作速度が、設定操作速度よりも低速であると、PTOクラッチ29の伝動状態への操作を阻止する。
(もっと読む)
移植機
【課題】植付に係る複数の作業装置を統括的に操作し、オペレータの負担を軽減し得るようにした移植機を提供する。
【解決手段】乗用田植機に対し、圃場端である枕地における作業にあっては、植付部、油圧制御装置、整地装置、或いはマーカ等の複数の作業部が同時に、枕地での制御状態となるように設定又は警報する1個の枕地スイッチ63を備えさせた。これにより、枕地での植付作業時に生じる複数の作業部の操作を1個の枕地スイッチ63によって統括的に行うことができる。
(もっと読む)
トラクタ
【課題】デフロック自動モードと手動モード切替の容易化を図る。
【解決手段】対地作業機(2R,2P)の昇降操作に連動してデフロック機構(85,89)のアクチュエータ(86,90)を作動させてデフロック状態とデフ機構(85,89)による連動状態とに切替える自動モードと、手動の選択操作によってデフロック状態とデフ機構(85,89)による連動状態とに切替える手動モードとを、作業機(2R,2P)下降中にデフロック設定手段(30)によってデフロック状態を選択するときは作業機(2R,2P)昇降に基づく自動モードに切り替え、作業機(2R,2P)上昇中にデフロック設定手段(30)によってデフロック状態を選択するときは手動モードに設定する。
(もっと読む)
乗用型苗移植機
【課題】旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】左右前輪6を所定角度以上に操向操作すると苗移植作業装置3を上昇させる指令を出力して苗移植作業装置3を上昇させ、且つ、走行距離算出手段にて走行距離を算出して、該走行距離に応じて苗移植作業装置3が下降する指令を出力する自動旋回制御を行なうと共に、マーカ作動操作具220の左右線引きマーカ195の作動を停止させる操作にて該自動旋回制御を行わない状態に切り替える制御装置170を設けた乗用型苗移植機。
(もっと読む)
作業車の前輪増速駆動装置
【課題】前輪増速装置を装備した作業車において、旋回時に作業機上昇と前輪増速が同時に作動してしまい、圃場端の耕耘の終了部が斜めになることがあった。
【解決手段】ステアリングハンドル57の回動角を検知する手段と、作業機昇降制御手段と、前輪増速切換手段と、これらの制御手段を備え、ステアリングハンドル57を直進位置から設定角度以上切ると、作業機を上昇させ、前輪を増速駆動するようにした作業車において、前記作業機の上昇動作と前輪を増速駆動する動作との間に所定の時間差を設けた。
(もっと読む)
農作業機の耕耘制御装置
【課題】耕耘機の耕耘作業を簡単にできるものでありながら、耕耘爪の耕耘深さを略一定に維持する耕耘深さ自動制御において、前記リヤカバーの均平性能を向上できる農作業機の耕耘制御装置を提供するものである。
【解決手段】前車輪及び後車輪にて走行自在に支持された作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、前記耕耘機を昇降動する昇降制御アクチュエータと、前記耕耘機のリヤカバーの回動角度を検出するリヤカバーセンサと、前記耕耘機の耕耘深さを設定する耕耘深さ設定器と、前記昇降制御アクチュエータを作動させる耕耘制御手段とを備えてなる農作業機の耕耘制御装置において、前記リヤカバーの閉動側の回動限度を決定するリヤカバー閉動制限機構と、前記リヤカバーの閉動側の回動限度の角度を調整する閉動制限アクチュエータとを備えたものである。
(もっと読む)
乗用型苗移植機
【課題】旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、旋回操作性の点において課題があった。
【解決手段】操向用の左右前輪6を設けた走行車両1に苗移植作業装置3を昇降自在に装着した乗用型苗移植機において、左右前輪6を所定角度以上に操向操作すると苗移植作業装置3を上昇させる指令を出力して苗移植作業装置3を上昇させ、且つ、走行距離算出手段にて走行距離を算出して、該走行距離に応じて苗移植作業装置3が下降する指令を出力する自動旋回モード中に、機体に設けた車両傾斜センサS4が機体の所定角以上の傾斜検出をすると、該自動旋回モードを中止する制御装置170を設けた乗用型苗移植機。
(もっと読む)
圃場走行作業用農作業車
【課題】圃場の往復作業走行の折返し部に来た際に、作業部の取扱いを要することなく機体を旋回することができるとともに、その旋回過程においてハンドル戻し等の再度の旋回操作をした場合であっても、作業部の上昇動作を招くことなく一連の動作を継続することができる圃場走行作業用農作業車を提供する。
【解決手段】圃場走行作業用農作業車は、圃場を旋回走行しうる機体と、作業位置まで下降して圃場走行作業をする作業部7と、その制御部21とを備えて構成され、上記制御部21は、機体走行中の旋回操作の検出に応じて作業部7の停止から、非作業位置への上昇、作業位置への下降、稼動までの一連の動作を制御する旋回連動制御を行うとともに、この旋回連動制御における作業部7の稼動動作に到る前の作業位置への下降動作から所定の旋回走行範囲について、作業部7を作業位置に維持するように制御する。
(もっと読む)
作業車両に於けるポジション制御装置
【課題】 車体のエンジン始動時に作業機昇降用のアクチュエータの駆動を禁止する牽制装置を設けた作業車両に於いて、牽制装置の作動を解除するタイミングを改善して確実な牽制解除を実行する。
【解決手段】 ポジションセンサの計測値とリフトアーム角センサの計測値が一致する設定点(A)を中心として、その上方に所定範囲の上部制限領域(+B)を設けるとともに、その下方に上部制限領域と同一幅の下部制限領域(−B)を設けておく。牽制装置が作動しているときに、リフトアーム角センサの計測値が設定点(A)にあり、ポジションセンサの計測値(C1)が上部制限領域(+B)の外にある場合、または下部制限領域(−B)の外にある場合は、この制限領域の外から一方の制限領域を通り抜けて他方の制限領域に入ったときに、牽制装置の作動を解除する。
(もっと読む)
1 - 20 / 20
[ Back to top ]