
Fターム[2B304PA11]の内容
Fターム[2B304PA11]に分類される特許
1 - 20 / 56
移動農機
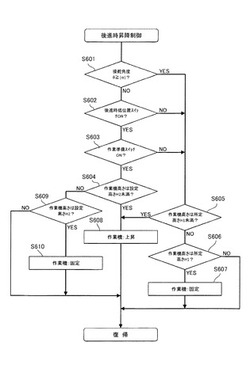
【課題】移動農機である乗用田植機による圃場での植付作業において、乗用田植機で畔際を後進する際に、乗用田植機の作業機である植付作業機と畔とが接触することを防止する移動農機を提供する。
【解決手段】乗用田植機1の後進操作の検出時に、後進操作前に操舵角センサより検出されたステアリングハンドルの操舵角が旋回領域に位置する場合には(S601)、植付作業機の高さ位置が設定されている場合であっても、植付作業機を第1位置(H1)にまで上昇させる(S608)。
(もっと読む)
作業車両

【課題】本発明の課題は、前後進レバーによる面倒な前後進切替操作をなくし、単純なスイッチ操作のみで前後進の切り替えが行え、作業位置の位置合わせが容易に行える装置を具現することにある。
【解決手段】本発明は、走行車体(1)の後部に装着した作業機(10)を昇降可能に設け、この作業機(10)を昇降操作する昇降レバー(12)のグリップ部(12a)に押し込み操作時にのみ作動可能なスイッチ(13)を設け、該スイッチ(13)は現在の機体の進行方向を変更するように構成してあることを特徴とする作業車両とする。また、スイッチ(13)のスイッチ押し込み時は、車速を予め設定されたコントローラ設定値まで下げる構成とする。また、スイッチ(13)の押し込み操作時には、後進時における車速を段階的に下げる構成とする。
(もっと読む)
作業車両
【課題】作業者が設定した所望の溝を圃場に精度よく形成することが可能な作業車両を提供する。
【解決手段】
トラクタは、圃場に自動制御によって溝を形成するに際し、まず、溝掘り作業機と圃場面との接地位置を検出する(S3)。そして、この接地位置を基準点として、溝掘り作業機を下降させることによって、溝の始端部において、設定された初期深さまで正確に溝を形成し、この始端部から所定の勾配で圃場に溝を形成する(S4)。
(もっと読む)
薬剤散布車の散布制御装置
【課題】左右のブームをそれぞれ昇降可能に備えて薬剤散布する際の機体旋回後の散布再開に伴う作業者の負荷軽減を可能とする薬剤散布車の散布制御装置を提供する。
【解決手段】薬剤散布車の散布制御装置は、直線散布走行から旋回走行により隣接域に移行して逆方向の直線散布走行を開始する薬剤散布車に薬剤散布用の左右のブーム(9b,9b)を昇降可能に備え、これら左右のブーム(9b,9b)を低位散布のための作業位置と高位待避のための非作業位置にそれぞれ切替え可能に構成され、直線散布走行中に所定の旋回判定舵角以上となる1回目の舵角検出によってその旋回外側のブーム(9b)を非作業位置に切替え制御し、これに続く同側の旋回判定舵角以上となる2回目の舵角検出によって旋回終了と判定し、この旋回終了の判定によって上記ブーム(9b)を作業位置に切替える制御処理を設けたものである。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
トラクタの作業機上限規制装置
【課題】作業機をトラクタの後部にリンク機構を介して昇降自在に装着したものにおいて、作業機の上昇上限位置をトラクタ近接位置に容易に設定することができるトラクタの作業機上限規制装置を提供する。
【解決手段】作業機8をトラクタ1の後部に昇降自在に装着するリンク機構9を備え、このリンク機構9を駆動して作業機8を上昇させる昇降シリンダ22を備え、作業機8が上昇してトラクタ1に近接した位置であるトラクタ近接位置に達したことを検出する上限検出センサ47を設け、この上限検出センサ47の検出信号によって昇降シリンダ22の作業機上昇動作を停止させるように構成する。
(もっと読む)
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
作業車両
【課題】機体後部に支持した作業機のローリング角度調節について、最小限の操作スイッチ構成と簡易な調節操作を確保した上で、傾斜センサによる一定傾斜の作業機による安定的な作業走行を可能とする作業車両を提供する。
【解決手段】作業車両は、ヒッチ(10)を介して支持した作業機(18)のローリング角度について、機体に備えた傾斜センサ(14)によって水平状態に維持する自動水平制御の適用の当否を水平切換スイッチ(43)の操作により切替え、自動水平制御の非適用時は、自動復帰構成の手動傾斜スイッチ(42a,42b)の左右の傾斜操作に応じてローリング角度を調節する制御部(35)を備えて構成され、上記制御部(35)は、自動水平制御の適用時に限り、所定時間を超える手動傾斜スイッチ(42a,42b)の継続操作に応じてローリング角度を調節するものである。
(もっと読む)
トラクタの作業機昇降制御装置
【課題】負荷率に応じて目標耕深を補正するにあたり、耕耘深さの急激な変化を回避すると共に、負荷率の回復を早めて耕深制御への復帰を促す。
【解決手段】耕深自動制御中に、エンジンENGの負荷率Lが所定値Iを超えたとき、目標耕深を補正してエンジンストールを防止する目標耕深補正手段を備えるトラクタの制御部20において、エンジンENGの負荷率Lが所定値Iを超えたとき、目標とする負荷率Hと現在の負荷率Lとの偏差に比例する比例制御量Tを算出すると共に、該比例制御量Tと前回の補正値Eとの差分Dを積分して目標耕深の補正値Eを決定するにあたり、負荷率Lの減少が見られないときは、それまでの積分値Kに差分Dを加算して補正値Eを決定し、負荷率Lの減少が見られるときは、それまでの積分値Kから差分Dを減算して補正値Eを決定する。
(もっと読む)
農作業機のリモコン装置
【課題】作業者に合うオフセット位置に作業部を容易に移動可能な農作業機のリモコン装置を提供する。
【解決手段】リモコン装置100は、作業部のオフセット位置を記憶する指令信号を送る作業位置記憶スイッチ101aと、農作業機の各種作動を制御する指令信号を送る指令スイッチと、各種作動を制御する指令信号データを記憶する記憶部111と、スイッチ101aや指令スイッチのオン時に指令信号データを記憶部111から読み込んで通信部112に送る制御部110を備える。制御部110は、スイッチ101aとスイッチ101bのオン時に、作業部のオフセット位置を記憶させる指令信号データを記憶部111から読み込み、その後のスイッチ101bのオン時に、作業部を現位置から記憶されるオフセット位置に移動させる指令信号データを記憶部111から読み込む指令信号データ選択部112aを有する。
(もっと読む)
トラクタ
【課題】耕耘作業時に急な車速変化が行われた場合や、枕地の耕耘作業を開始する場合に、圃場面の仕上がりが悪くなることを抑制するトラクタを提供することを目的とする。
【解決手段】ロータリ耕耘装置30を昇降させて耕深を予め設定した目標耕深に追従させる耕深制御により耕耘作業を行うトラクタ1において、車速が規定値以上変化した場合は、規定距離A又は規定時間Bが経過するまでは、前記耕深制御による前記ロータリ耕耘装置30の昇降を制限するものである。詳細には、ロータリ耕耘装置30の昇降を禁止する、または、耕深制御のゲインを小さくする、または、耕深制御の不感帯を大きくする、または、耕深制御の目標耕深を耕深側に補正するものである。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のためのリモコンの操作ボックスを部品の交換なしに異なる作業機に対応できる農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機と、操作パネル100、101、102上の操作スイッチを操作する操作ボックス10とを備え、作業機は、当該作業機に設けられた出力機器30と、操作スイッチの操作による操作信号を受信しこれに基づき出力機器30を制御する制御部21とを有し、操作ボックス10は、作業機の異なる機種に対応した複数の操作パネル100、101、102を有し、複数の操作パネル100、101、102は、操作ボックス10を構成する筐体の異なる面に設置されている。
(もっと読む)
トラクタ
【課題】ロータリ耕耘装置の強制昇降時にはエンジンストールを招くことなくエンジンの回転速度を変更し得るトラクタを構成する。
【解決手段】ロータリ耕耘装置の強制上昇制御時には、遅延時間設定ダイヤル41で設定されている第1遅延時間が経過した後に回転速度変更手段52がエンジンEの回転速度を減ずる減速制御を行い、この上昇状態において強制下降制御を行う際には、回転速度変更手段52がエンジンの回転速度を復帰させる復帰制御を行い、強制下降制御を開始するタイミングで復帰制御を開始し、この後、遅延時間設定ダイヤル41で第1遅延時間とともに設定される第2遅延時間が経過した後にロータリ耕耘装置の強制下降制御を開始する。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のための設定等が携帯電話を利用することで、より簡単に行える農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、携帯電話2は、携帯電話2のボタンを利用して作業機3のための設定を行う設定機能と、設定機能による設定情報を送信する送信機能とを有し、作業機3は、作業機3に設けられた出力機器と、携帯電話2から設定情報を受信する受信部と、出力機器の操作を行う操作表示部70と、受信部が受信した設定情報と操作表示部70からの操作信号に基づき出力機器を制御する制御部5とを有する。
(もっと読む)
対地作業部付き作業車両
【課題】手動昇降用のポジションレバーおよび自動昇降用の操作パネルに起因する対地作業部の予期せぬ昇降動作を回避して安全な昇降制御を可能とする対地作業部付き作業車両を提供する。
【解決手段】対地作業部付き作業車両は、手動昇降用のポジションレバー(21a)と自動昇降用の操作パネル(22)のそれぞれの指示に沿って対地作業部(41)の保持高さを昇降制御する作業機制御部(C1)と、車両起動当初における対地作業部(41)の昇降制御を規制するセフティ機構と、このセフティ機構による規制をポジションレバー(21a)の所定の予備操作によって解除する解除手段とを備えて構成され、上記作業機制御部(C1)は、車両起動時に操作パネル(22)の信号の異常があった場合に、ポジションレバー(21a)の指示に沿って対地作業部(41)の保持高さを昇降制御する制御処理を備えたものである。
(もっと読む)
作業車両
【課題】作業車両において、作業機を昇降させることのできるフィンガーレバーを利用した左右操舵装置、及びウインカ点滅を可能にする。
【解決手段】ステアリングハンドルの近傍に一回の操作で作業機を昇降させることのできるフィンガーレバー、該フィンガーレバーの昇降操作検出用のフィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチ、及び、チエックヒューズを設け、旋回切れ角センサの故障時には前記チエックヒューズを取り外すと緊急操舵モードに移行し、前記フィンガーレバーの昇降操作に基づく前記フィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチの検出信号により、前記旋回切れ角センサの検出値を無視して前記旋回駆動手段、前記操舵装置を作動させて左右操舵するコントローラを設けたことを特徴とする作業車両とする。
(もっと読む)
移動農機
【課題】機体後部にリンク機構を介して作業機を昇降自在に連結してなる農業用トラクタや乗用型田植機等の移動農機において、隣接する作業列に対する作業機の作業開始位置を的確且つ簡単に位置合わせできるようにする。
【解決手段】昇降操作具17を上げ操作して機体後部に連結した作業機6を最上昇位置まで上昇させた状態で機体を旋回させる際、前輪2の操舵角を検出するポテンショメータ43が減少により機体の旋回終了を検出した時は、作業機6を最上昇位置から所定の高さ位置まで自動的に下降させてその姿勢を保持した後、前記昇降操作具17の下げ操作により作業機6を作業位置まで下降させるように制御装置31を構成した。
(もっと読む)
コンバイン
【課題】単純な操作により自動昇降制御を行うために、刈取作業中に誤操作をしてしまい未刈り穀稈を踏み倒す可能性があった。
【解決手段】自動昇降指令する自動昇降操作手段(20)を設け、制御手段(21)は、自動昇降操作手段(20)の操作を入力中に前処理操作検出手段(22)による昇降操作レバー(11)操作を入力すると、前処理高さ検出手段(25)の入力に基づいて前処理部(5)が設定目標位置まで自動昇降するように、昇降駆動手段(4)を昇降操作レバー(11)の操作方向に駆動制御する。
(もっと読む)
移植機
【課題】新たな油圧バルブや操作手段を設けることなく植付装置の下降速度を遅くすることを可能とした移植機を提供する。
【解決手段】乗用田植機1は、油圧モードとされた際、植付装置30を昇降駆動する際の通常の速度より遅い速度によって植付装置30を下降させる遅速制御位置48と、油圧シリンダ21の下降を停止させる停止位置49とを設けた油圧感度調節ダイヤル16を備えので、油圧モードに切換えられた際、即ちメンテナンス時等の際にも、新たに操作手段を設けることなく、通常よりも遅い下降速度によって植付装置30を下降させることができる。
(もっと読む)
作業車
【課題】傾斜地圃場で等高線に沿って作業を行う場合の作業機の谷側への沈み込みの是正を容易に行えるようにする。
【解決手段】作業機37の左右方向の傾斜角度θを検出するセンサーの検出値と傾斜設定器によって設定した設定値θ1に基づいて、作業機37を自動的にローリング制御するローリング制御手段を備える。設定値θ1を補正する傾斜地ローリング補正手段と、傾斜地ローリング補正手段で補正した補正値θ2に対して、この補正値θ2を更に補正する手動ローリング補正手段を設け、手動ローリング補正手段によって補正した補正値θ2を表示する補正値表示部を備える。
(もっと読む)
1 - 20 / 56
[ Back to top ]