
Fターム[2B304PC02]の内容
Fターム[2B304PC02]に分類される特許
1 - 20 / 27
乗用移植機
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
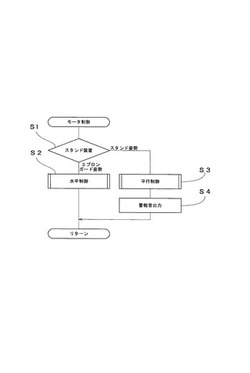
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
トラクター直装式ブームスプレーヤ

【課題】 ブームが実際に傾斜した場合にそのブームを速やかに、かつ適正に回動制御して迅速な傾斜角度の補正ができるトラクター直装式ブームスプレーヤを提供する。
【解決手段】 ブーム4が基部フレーム3に対してその重心近傍で回動自在に支持されているとともに、ブーム4を正逆方向に回動させるブーム回動手段8と、前輪車軸24の車体21に対する相対的な傾斜角度を計測する前輪傾斜角度計測手段9と、走行面の凹凸により後輪が傾斜する前に、前輪車軸の相対的な傾斜角度の方向と反対方向にブーム4を回動させるための準備をブーム回動手段8に実行させるブーム回動準備制御手段11と、ブーム4の基部フレーム3に対する相対的な傾斜角度を計測するブーム傾斜角度計測手段10と、ブーム4の相対的な傾斜角度が所定の範囲を超えた場合、回動準備中のブーム回動手段8を駆動してブーム4を制御するブーム回動制御手段12とを有する。
(もっと読む)
作業車両
【課題】作業者が設定した所望の溝を圃場に精度よく形成することが可能な作業車両を提供する。
【解決手段】
トラクタは、圃場に自動制御によって溝を形成するに際し、まず、溝掘り作業機と圃場面との接地位置を検出する(S3)。そして、この接地位置を基準点として、溝掘り作業機を下降させることによって、溝の始端部において、設定された初期深さまで正確に溝を形成し、この始端部から所定の勾配で圃場に溝を形成する(S4)。
(もっと読む)
トラクタの作業機上限規制装置
【課題】作業機をトラクタの後部にリンク機構を介して昇降自在に装着したものにおいて、作業機の上昇上限位置をトラクタ近接位置に容易に設定することができるトラクタの作業機上限規制装置を提供する。
【解決手段】作業機8をトラクタ1の後部に昇降自在に装着するリンク機構9を備え、このリンク機構9を駆動して作業機8を上昇させる昇降シリンダ22を備え、作業機8が上昇してトラクタ1に近接した位置であるトラクタ近接位置に達したことを検出する上限検出センサ47を設け、この上限検出センサ47の検出信号によって昇降シリンダ22の作業機上昇動作を停止させるように構成する。
(もっと読む)
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
作業車両
【課題】機体後部に支持した作業機のローリング角度調節について、最小限の操作スイッチ構成と簡易な調節操作を確保した上で、傾斜センサによる一定傾斜の作業機による安定的な作業走行を可能とする作業車両を提供する。
【解決手段】作業車両は、ヒッチ(10)を介して支持した作業機(18)のローリング角度について、機体に備えた傾斜センサ(14)によって水平状態に維持する自動水平制御の適用の当否を水平切換スイッチ(43)の操作により切替え、自動水平制御の非適用時は、自動復帰構成の手動傾斜スイッチ(42a,42b)の左右の傾斜操作に応じてローリング角度を調節する制御部(35)を備えて構成され、上記制御部(35)は、自動水平制御の適用時に限り、所定時間を超える手動傾斜スイッチ(42a,42b)の継続操作に応じてローリング角度を調節するものである。
(もっと読む)
農用トラクタ
【課題】本発明の課題は、リヤカバーの感度切替を本機側から簡単に行えるようにして、作業の効率化を図る。
【解決手段】ロータリ作業機の後部に枢着されたリヤカバー14の上下揺動変位を検出するオートケーブル16と、本機側に設置されていてオートケーブル16の移動位置変更によってリヤカバーの揺動変位を設定するケーブル支持アーム17と、前記ポジションレバー20位置近くに設けられていて前記ケーブル支持アーム17を位置変更して耕深量を設定調節するオートレバー21とを備え、このオートレバー21とケーブル支持アーム17及び前記ポジションリンクアーム10との間にはリヤカバー14の感度切替手段Aを設けてあることを特徴とする農用トラクタの構成とする。
(もっと読む)
畦成形機
【課題】水田等の圃場の作業残隅部の畦成形作業を走行機を後進させて行うような熟練を要する作業機ではなく、制御装置や制御プログラムが簡易で操作が簡単であるとともに、全体の製造コストを低くできる畦成形機の提供。
【解決手段】走行機が畦から離れる方向に旋回走行しながら直線状の連続した畦を成形する非平行走行畦成形作業が行える制御部を有し、非平行走行畦成形作業時は、畦成形作業部4に畦成形作業部4の進行方向の変位量を検知する検知手段6が設けられていて、変位量に基づき第2水平回動手段を作動させて畦成形作業部4の進行方向を一定方向とする制御を行うとともに、第1水平回動手段はフリー状態と固定状態を交互に予め設定した実行時間で繰り返し行う制御のみにより制御されて畦成形作業を行う畦成形機による。
(もっと読む)
作業機
【課題】 自走車の走行や駆動負荷の増大を発生しにくくしながら対地作業装置による作業深さを設定作業深さ又はそれに近い深さに維持することができる作業機を提供する。
【解決手段】 自走車体に連結された対地作業装置20を自走車体に対して昇降操作する駆動機構と、対地作業装置20の作業深さを検出するよう対地作業装置20に設けられた作業深さ検出機構50と駆動機構の操作部30とを連係させて、作業深さ検出機構50による検出作業深さが設定作業深さになるよう駆動機構を操作させる連係機構Sを備えてある。作業深さ検出機構50による検出作業深さが深い側に単位変化量を変化することによって対地作業装置20が上昇する上昇変位量が、作業深さ検出機構50による検出作業深さが浅い側に前記単位変化量を変化することによって対地作業装置20が下降する下降変位量よりも大になる状態で、連係機構Sが駆動機構を操作させるよう構成してある。
(もっと読む)
作業車のPTOクラッチ操作構造
【課題】 作業車のPTOクラッチ操作構造において、昇降レバー及びポジション制御手段を備えた場合、作業装置の昇降駆動に応じてPTOクラッチを適切に伝動及び遮断状態に操作することができるように構成する。
【解決手段】 所定範囲A1に亘って人為的に操作される昇降レバー12を備えて、ポジション制御手段を備える。所定範囲A1の上限位置A3よりも下降側にPTO切換位置A4,A5を設定する。昇降レバー12がPTO切換位置A4,A5よりも下降側に位置すると、PTOクラッチ29を伝動状態に操作し、昇降レバー12がPTO切換位置A4,A5よりも上昇側に位置すると、PTOクラッチ29を遮断状態に操作する。
(もっと読む)
田植機
【課題】整地装置により整地作業を行うことなく、植付作業のみを行うことができるようにすること。
【解決手段】走行部の後方に植付部を昇降自在に連結し、同植付部に整地装置を取り付けた田植機において、走行部に設けた原動機部に伝動機構部を介して前記整地装置を連動連結すると共に、上記伝動機構部にクラッチ機構を設け、同クラッチ機構を入り切り作動させる作動手段の動作と、植付部の昇降動作とを連動させると共に、上記作動手段にクラッチ操作手段を連動連結した。
(もっと読む)
作業車の作業機昇降制御装置
【課題】安価なモータを用いて下降側に十分な減速が安定して行われることを可能にする農用作業車の昇降制御機構を提供する。
【解決手段】作業機14を昇降する油圧シリンダ6と、該油圧シリンダ6への圧油の送油を昇降操作手段の操作により切り換えるポジション制御バルブ90と、該ポジション制御バルブ90の操作部に連繋された正逆回転可能な電動モータ95を備え、該モータ95にはその出力軸の回転位置を検出する手段85を備え、作業機14を前記電動モータ95の操作位置に対応して昇降自在に制御する作業車1の作業機昇降制御装置60において、前記モータ95の目標停止位置からの偏差に応じて出力量を可変に制御し、前記モータ95の回転速度が設定値以下に達したならば偏差に対して予め定められたパラメータを変更制御し、動作速度が設定値以下に達したときのパラメータを最小出力として、全体の偏差と出力の関係パラメータを再計算させる。
(もっと読む)
作業車の作業機昇降制御装置
【課題】安価なモータを用いて下降側に十分な減速が安定して行われることを可能にする作業車の作業機昇降制御装置を提供する。
【解決手段】作業車両1に支持された作業機14を昇降する油圧シリンダ6と、該油圧シリンダへの圧油の送油を昇降操作手段の操作により切り換えるポジション制御バルブ90と、該ポジション制御バルブ90の操作部に連繋された正逆回転可能な電動モータ95を備え、該モータ95にはその出力軸の回転位置を検出する手段85を備え、前記油圧シリンダ6により走行機体に支持された作業機14を、前記電動モータ95の操作位置に対応して昇降自在に制御する作業車の昇降制御装置60において、前記モータ95を制御装置60と接続し、前記モータの回転速度が低速の第一閾値S1以下に達したならば、モータ回転位置に関わらず前記モータ95に対する出力量をその回転速度に保持するように制御する。
(もっと読む)
作業機の油圧装置
【課題】 作業装置を操作目標位置に停止衝撃が発生しにくい状態で下降操作することができるようにする。
【解決手段】 油圧シリンダ30の給排油路40を、シリンダ側開閉弁42とタンク側開閉弁47とによって排油状態、給油状態、給排停止状態に切り換え操作する。シリンダ側開閉弁42及びタンク側開閉弁47に接続された操作油路50に昇降バルブ60を設けてある。昇降バルブ60は、操作油路50を操作してシリンダ側開閉弁42及びタンク側開閉弁47の背圧を操作することにより、給排油路40を切り換え操作して油圧シリンダ30を操作する。昇降バルブ60の下降状態と停止状態の間に減速操作状態を設けてある。昇降バルブ60の減速操作状態は、スプール65の傾斜外周部65dによってチェック弁70を操作して操作油路50を絞り操作し、シリンダ側開閉弁42が給排油路40を排油状態から給排停止状態に漸次に切り換え操作するようにする。
(もっと読む)
姿勢制御装置
【課題】車輌本体の連結された一の耕耘機を他の耕耘機に取り替えた場合であっても、該他の耕耘機の位置制御を良好に行える姿勢制御装置を提供する。
【解決手段】位置制御を司る制御手段に種別の異なる耕耘機毎の制御条件を記憶させておき、耕耘リヤカバーが耕耘爪の回動軌跡に最も近づいた状態での該耕耘リヤカバーの最閉回動角度に基づいて当該耕耘機の種別を判別し、予め記憶されている前記制御条件のうち判別された当該耕耘機用の制御条件を用いて位置制御を行う。
(もっと読む)
姿勢制御装置
【課題】車輌本体に対して昇降可能且つ左右に傾動可能に連結された耕耘機に対して自動高さ制御、自動耕深制御及び自動傾き制御を行う姿勢制御装置であって、前記耕耘機を最上昇位置よりは下方で且つ地面よりは上方に位置させた非耕耘作業状態での車輌本体の走行時に、前記自動傾き制御によって前記耕耘機が意に反して大きく傾動されることを防止し得る構造簡単な姿勢制御装置を提供する。
【解決手段】自動高さ制御と自動耕深制御と自動傾き制御とを行うように構成された姿勢制御装置は、車輌本体50の車速vが所定の閾値車速vSより高速の場合には、自動傾き制御の制御精度を緩和させると共に、閾値車速vSを設定高さ位置hSに応じて変更するように構成されている。
(もっと読む)
耕耘制御装置
【課題】車輌本体に対して昇降可能に連結された耕耘機の耕深深さを制御するための耕耘制御装置であって、耕耘作業開始時において、既耕耘地面の表面に凹凸が残ったり、前記耕耘機のハンチング現象が発生することを有効に防止し得る構造簡単な耕耘制御装置を提供する。
【解決手段】耕耘上面カバー435及び耕耘リヤカバー437を含む耕耘カバーがカバー回動用アクチュエータ700によって耕耘爪軸433の軸線回りに前後へ回動可能とされた耕耘機400の耕深位置hDを設定耕深位置hRに追従させる自動耕深制御を行うように構成された耕深制御装置は、前記耕耘機400を非耕耘状態位置hLから下降させて自動耕深制御での耕耘作業を開始させる際に、前記耕耘機400の接地から一定区間又は一定期間においては、前記自動耕深制御を停止すると共に、前記耕耘リヤカバー437の接地長さが延長されるように前記カバー回動用アクチュエータ700を作動させる。
(もっと読む)
作業車両のアーム型作業機
【課題】農用作業車両の複数箇所にロボットアームを装着可能に構成し、ロボットアームにより複数の作業を円滑に実行する。
【解決手段】縦軸(22c)回り及び横軸(22d)回りに回動自在な第一アーム(23)と、この第一アーム(23)の先端部に屈折自在に連結している第二アーム(24)とでロボットアームを構成する。ベース部材(22)に前記第一アーム(23)を前記縦軸(22c)回りに回動自在に支持し、トラクタ(1)の機体前側部と左右側部にベース部材(22)の取付部(21a,21b)を設け、第二アーム(24)の先端部に複数の補助作業装置(26,…)を取り付け可能に構成する。
(もっと読む)
トラクタの自動耕深制御装置
【課題】 トラクタの自動耕深制御装置において、ロータリ耕耘装置のトラクタに対する高さにかかわらず、同じ設定耕深に対する実耕深を安定させることができるようにする。
【解決手段】 リフトアーム4の上下揺動に連動して後カバー19と油圧制御機構10との連係状態を変更する連係変更手段を設け、同じ設定耕深に安定維持された時の後カバー19の姿勢が、リフトアーム4が上方に揺動されているほどロータリカバー18に対して下方に揺動変位した姿勢となるように、リフトアーム4の上下揺動姿勢とを後カバー19の姿勢とを連係してある。
(もっと読む)
農作業機の耕耘制御装置
【課題】耕耘機の耕耘作業を簡単にできるものでありながら、耕耘爪の耕耘深さを略一定に維持する耕耘深さ自動制御において、前記リヤカバーの均平性能を向上できる農作業機の耕耘制御装置を提供するものである。
【解決手段】前車輪及び後車輪にて走行自在に支持された作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、前記耕耘機を昇降動する昇降制御アクチュエータと、前記耕耘機のリヤカバーの回動角度を検出するリヤカバーセンサと、前記耕耘機の耕耘深さを設定する耕耘深さ設定器と、前記昇降制御アクチュエータを作動させる耕耘制御手段とを備えてなる農作業機の耕耘制御装置において、前記リヤカバーの閉動側の回動限度を決定するリヤカバー閉動制限機構と、前記リヤカバーの閉動側の回動限度の角度を調整する閉動制限アクチュエータとを備えたものである。
(もっと読む)
1 - 20 / 27
[ Back to top ]