
Fターム[2B304QA30]の内容
Fターム[2B304QA30]に分類される特許
1 - 20 / 21
作業車両のエンジン負荷制御装置
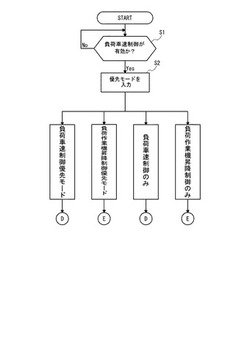
【課題】作業時に過負荷がかかった場合において、作業形態に応じて減速割合を変更可能とし、負荷制御のモードを切換可能な作業車両のエンジン負荷制御装置を提供する。
【解決手段】作業車両のエンジン負荷制御装置において、エンジン負荷制御装置50は、エンジン回転数を設定エンジン回転数Xsに保つように、エンジン21が過負荷となった時の負荷に応じて、車速を増減し、又は作業機30を昇降する構成とし、負荷車速制御と負荷作業機昇降制御との制御優先順位を設定する制御実行順序設定手段52を備える。
(もっと読む)
作業機

【課題】複数の表示装置を備えていても、表示装置の種類(機種)や仕様の変更を容易に行うことができる作業機を提供する。
【解決手段】トラクタ2は、検出器で検出した状態を表示可能な複数の表示装置(メータパネル30及び液晶モニタ80)と、該複数の表示装置がCAN通信網Nを介して接続されると共に検出器が接続され、且つ検出器で検出された状態を示す検出情報を複数の表示装置に出力するメインECU50と、を備える。メインECU50は、検出情報を表示させる表示装置を識別するための識別情報を出力する識別情報出力手段52と、該検出情報を出力する検出情報出力手段51とを有する。複数の表示装置は、識別情報によって指定されたときに、検出情報出力手段51によって出力された検出情報を表示する。
(もっと読む)
乗用作業車
【課題】車体の走行に伴って車体周囲の作業対象物に対する作業を行う電動式作業デバイスの作業負荷の変動による不都合を低減する乗用作業車を提案する。
【解決手段】駆動車輪ユニットを走行駆動するための走行用電動機ユニットと、目標走行速度を設定するために運転者によって操作される速度設定操作ユニットと、車体の走行に伴って車体周囲の作業対象物に対する作業を行う作業デバイスを駆動するための作業用電動機と、作業用電動機の負荷を評価する作業負荷評価部によって評価された作業用電動機の負荷がしきい値より高い異常負荷である場合に目標走行速度より低い例外速度で走行用電動機ユニットを制御する例外速度制御を実行する例外速度制御部とを備えている。
(もっと読む)
薬液散布作業車両
【課題】旋回時又は旋回終了時に旋回外側のサイドブームを自動的に上昇又は下降させる制御を安全性を考慮して可能にした薬剤散布作業車両を提供すること。
【解決手段】GPS受信機81から得られる車速又は車輪12又は13の回転数から得られる車速により適切な薬液散布量となるように薬液タンク18からの薬液流量を流量制御モータ10により流量調節弁73の開度を調整する。このとき車輪12及び/又は13の操舵角の検知により自動的に旋回外側のサイドブーム44の上昇を行い、また前記車速が所定値以上になると旋回外側のサイドブーム44の自動上昇を行わない制御を行うことで、高速走行時にサイドブーム44の破損等の不具合を防止できる。
(もっと読む)
ブームスプレーヤ
【課題】センタブームの昇降移動やサイドブームの開閉移動時の操作が簡単であるとともに、誤操作によるサイドブーム等の破損を防止することができるブームスプレーヤを提供する。
【解決手段】走行装置と、センタブームと、サイドブームと、センタブームを昇降移動させる昇降移動手段と、サイドブームを開閉移動させる開閉移動手段と、サイドブーム4の閉位置および開位置に対応する閉位置および開位置の操作位置の間を回動操作されることにより、開閉移動手段を操作する開閉操作レバーとを備えたブームスプレーヤにおいて、開閉操作レバーが閉位置から所定開度の位置の範囲にあるときに昇降移動手段によりセンタブームを下降移動させた場合に、センタブームが所定位置になると昇降移動手段によるセンタブームの下降移動を停止させる下降移動停止手段80を備えている。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のためのリモコンの操作ボックスを部品の交換なしに異なる作業機に対応できる農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機と、操作パネル100、101、102上の操作スイッチを操作する操作ボックス10とを備え、作業機は、当該作業機に設けられた出力機器30と、操作スイッチの操作による操作信号を受信しこれに基づき出力機器30を制御する制御部21とを有し、操作ボックス10は、作業機の異なる機種に対応した複数の操作パネル100、101、102を有し、複数の操作パネル100、101、102は、操作ボックス10を構成する筐体の異なる面に設置されている。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のためのリモコンの操作ボックスを部品の交換なしに異なる作業機に対応できる農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機と、タッチスクリーンであるタッチパネル部41に表示された操作表示画面上の操作スイッチ表示に触れて操作する操作ボックス10とを備え、作業機は、当該作業機に設けられた出力機器30と、操作スイッチ表示の操作による操作信号を受信しこれに基づき出力機器30を制御する制御部21とを有し、操作表示画面は、作業機の機種毎に変更して、異なる作業機の操作を可能とする。
(もっと読む)
対地作業部付き作業車両
【課題】手動昇降用のポジションレバーおよび自動昇降用の操作パネルに起因する対地作業部の予期せぬ昇降動作を回避して安全な昇降制御を可能とする対地作業部付き作業車両を提供する。
【解決手段】対地作業部付き作業車両は、手動昇降用のポジションレバー(21a)と自動昇降用の操作パネル(22)のそれぞれの指示に沿って対地作業部(41)の保持高さを昇降制御する作業機制御部(C1)と、車両起動当初における対地作業部(41)の昇降制御を規制するセフティ機構と、このセフティ機構による規制をポジションレバー(21a)の所定の予備操作によって解除する解除手段とを備えて構成され、上記作業機制御部(C1)は、車両起動時に操作パネル(22)の信号の異常があった場合に、ポジションレバー(21a)の指示に沿って対地作業部(41)の保持高さを昇降制御する制御処理を備えたものである。
(もっと読む)
農作業機用リモコン装置
【課題】電源を入れたと同時に、操作者が意図しない農作業機の動作が実行される可能性をなくすことができる農作業機用リモコン装置を提供する。
【解決手段】農作業機用リモコン装置60は、電源スイッチ210がオン状態のとき、指令信号を搬送するための電波を送信し、各指令スイッチがオンされたとき指令信号データに基づいて指令信号を電波に載せて送信する通信手段223と、各指令スイッチがオンされたとき指令信号データを記憶手段222から読み込み、指令信号データを通信手段223に送る制御手段221を備え、通信手段223は、電源スイッチ210が入れられた立ち上げ時には、各指令スイッチを操作するときに出力する電波の強度よりも小さい強度で出力する制御を行う出力制御手段226を備える。
(もっと読む)
農作業機用無線受信制御装置及び農作業機用リモコン装置
【課題】無線受信制御装置の電源スイッチを入れたときにいきなり農作業機の動作が実行される可能性をなくし、安全性を高めることができる農作業機用無線受信制御装置及び農作業機用リモコン装置を提供する。
【解決手段】農作業機用無線受信制御装置70は、走行機体の後部に装着される農作業機に設けられ、農作業機の動作を指令する操作指令を無線信号によって指令するリモコン装置60からの信号を受信し、リモコン装置に返信の信号を送る通信手段と、通信手段によって受信された信号に従って農作業機の作動を制御する制御手段を備え、電源スイッチをオンしたときに、リモコン装置からの信号が受信圏内に存在するときには、自動的に制御手段への電力の供給を遮断する電源停止制御手段200aを備える。
(もっと読む)
作業車輌の傾斜制御装置
【課題】静電容量の変化により走行機体の傾斜を検出する傾斜センサは、温度ドリフトがあり、高い精度による傾斜制御を妨げる原因になっている。
【解決手段】傾斜センサの複数の温度ドリフト特性A,B,C…を予め格納しておき、搭載センサに応じて、上記複数の特性から1つを選択する。作業機を水平にして、上記選択した温度ドリフト特性の0点電圧を、その測定時温度(例えば25℃)と共に記憶し、使用時の温度(例えば50℃)との差並びに上記選択した特性で、使用時のセンサの0点電圧(基準値)を補正する。該補正したセンサの検出値に基づき、作業機の左右傾斜姿勢を制御する。
(もっと読む)
作業車両搭載用制御装置
【課題】制御手段210,213,281,282の組み付け工程において、作業車両1の各搭載箇所に対して、誤ったプログラム書き込み済制御手段を取り付けてしまう人的ミスを回避できるようにする。
【解決手段】各制御手段210,213,281,282を作業車両1に組み付けた状態において、各制御手段210,213,281,282にその固有情報に応じた識別子を設定する。通信バス280に接続された外部端末290から識別子毎の制御プログラムを読み出して、識別子の一致する制御手段210,213,281,282にインストールするように構成する。
(もっと読む)
作業車両搭載用制御装置
【課題】作業車両1に各制御手段210,213,281,282を組み付けた後に、個別の制御プログラムをそれぞれ対象となる制御手段210,213,281,282に書き込む場合において、適式な制御プログラムを各制御手段210,213,281,282に伝送できるようにする。
【解決手段】通信バス280に接続された外部端末290にて、識別子毎のプログラムを、識別子に対応した制御手段210,213,281,282にインストールするように構成されており、外部端末280と各制御プログラムとに保安用の固有コードを有する。インストール前に予め、外部端末280の固有コードと各制御プログラムの固有コードとを照合し、合致した制御プログラムを、これに対応する制御手段210,213,281,282にインストールするように構成する。
(もっと読む)
作業車両
【課題】本発明は、複数の自動制御を行えるようにしたトラクタで、感度調整のスイッチを増やすことなく、感度調整が容易に出来るようにすること課題とする。
【解決手段】複数の自動制御スイッチを設けたトラクタにおいて、自動制御開始を行う各種自動制御対応スイッチ(デセラスイッチ220、オートロータリ切換スイッチ224、オートリフトスイッチ225、オートアクセルスイッチ226、バックアップスイッチ227、水平切換スイッチ239)と別の1つの調整スイッチ237の同時操作によって感度調整モードに移行し、さらに別の一対で構成されるスイッチ232,233で制御感度を変更可能に構成したことを特徴とする作業車両の構成とする。
(もっと読む)
レバーロックアウト組立体
【課題】効果的なレバーロックアウト組立体を提供すること。
【解決手段】レバー部材24は、切欠き74により隔てられる一対の腕部70,72を有する。ロックアウト滑動部44は、滑動部支持体により滑動可能に支持される。ロックアウト滑動部は、隆起部と凹部とを有する。ロックアウト滑動部44は、隆起部56が切欠き74により受容され且つレバー部材24の回転を防止するために腕部70,72と係合可能であるロックアウト位置へ滑動可能である。ロックアウト滑動部44はまた、凹部が切欠き74と位置合わせされ且つ腕部70,72が凹部により回転可能であるロック解除位置へ滑動可能である。
(もっと読む)
対地作業機牽引作業車両
【課題】過大な牽引負荷による機体および作業機の保護の確保とともに、過負荷対応動作による作業の中断を最小限度に抑えて能率良く作業を進めることができる対地作業機牽引作業車両を提供する。
【解決手段】対地作業機牽引作業車両は、対地作業機牽引装置に連結した作業機の作業深さを規定する左右のロワリンク(11)と、このロワリンク(11)の昇降駆動制御によって設定の作業深さに調節する制御部(21)とを備えて作業走行可能に構成され、上記制御部(21)は、ロワリンク(11)の牽引負荷を検出し、所定の負荷限度(L)を越えたまま所定時間が経過するとロワリンク(11)を上昇駆動し、この上昇駆動の間の牽引負荷が所定の許容基準値(L−α)まで低下すると上昇駆動を停止するものである。
(もっと読む)
農作業機
【課題】トラクタに装着し農作業をする農作業機が作業しているか否かをより的確に判定
する判定システムを有する農作業機を提供することを目的とする。
【解決手段】農作業機が移動しているか否かを検知する移動検知手段1と、農作業機の姿勢が作業姿勢であるか否かを検知する作業姿勢検知手段2と、農作業機が作業している否かを判定する判定手段4とを有し、判定手段4は、移動検知手段1からの情報から農作業機が移動中であり、かつ、作業姿勢検知手段2からの情報から農作業機の作業姿勢が作業状態であると判断した場合、当該農作業機が作業中であると判定する。
(もっと読む)
トラクタ
【課題】耕深を維持するための適正な車速、又は車速を維持するための適正な耕深を容易に認識可能とする。
【解決手段】コモンレールを備えたエンジンと該エンジンの制御を行うECU、及び作業機を搭載したトラクタにおいて、該作業機により耕す深さを設定する耕深設定手段、該耕深設定手段の機能を入り状態とする自動耕深スイッチ、該自動耕深スイッチが入り状態のときに耕深優先又は車速優先を選択する選択スイッチを設け、前記自動耕深スイッチが入り状態のときに前記選択スイッチにより耕深優先又は車速優先のいずれか一方が選択された状態で作業機を駆動して作業走行が開始されると、前記ECUは負荷率を検出して本機側の制御装置に送信し、該制御装置は耕深を維持するための車速、又は車速を維持するための耕深を算出してモニターに表示することを特徴とするトラクタの構成とする。
(もっと読む)
農作業車両
【課題】本発明は、畦を乗り越える圃場出入時に作業機の上昇等の複雑な操作を自動化してオペレータが操縦操作に専念出来るようにすることで、安全な圃場の出入が行えるようにすること課題とする。
【解決手段】農作業車両の操縦席6の近傍に、圃場内への侵入時に操作する圃場出入スイッチ59を設け、走行速度の設定と、PTO軸停止と、作業機の上昇、及びエンジン回転数上昇をあらかじめ設定可能な構成とし、前記圃場出入スイッチ59を入り状態にすることで、前記設定している走行速度の低速化と、PTO軸停止と、作業機の上昇、及びエンジン回転上昇を自動に制御する構成を備えたことを特徴とする農作業車の構成とする。また、圃場出入スイッチ59を変速レバー18或いはステアリングハンドル8に設けたことを特徴とする農作業車両の構成とする。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体の走行距離を検出する走行距離検出手段27を備える。作業装置の上昇操作に基づいて、機体の走行距離の検出が開始される。機体の走行距離が設定距離に達すると、上昇状態の作業装置を地面まで自動的に下降駆動する自動下降手段を備える。
(もっと読む)
1 - 20 / 21
[ Back to top ]