
Fターム[2B396QA14]の内容
脱穀機要素−籾処理 (10,947) | 検出の目的又は検出量 (294) | 検出内容又は検出量 (190) | 時間 (10)
Fターム[2B396QA14]に分類される特許
1 - 10 / 10
コンバインの穀粒排出構造
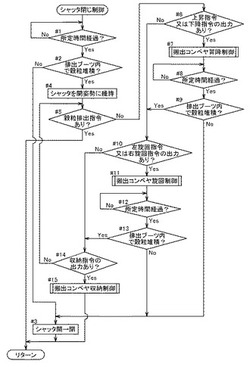
【課題】穀粒排出口で穀粒が滞留している状態でシャッタが閉状態に切り換わることに起因した不具合の発生を防止する。
【解決手段】穀粒排出口のシャッタの開閉を制御する制御手段と穀粒排出口での穀粒の滞留を検出する穀粒センサとを備え、制御手段が、穀粒排出装置の排出停止状態への切り換えを検知すると、穀粒センサが穀粒の滞留を検出しているか否かを判別し、穀粒センサが穀粒の滞留を検出している場合はシャッタを開状態に維持し、滞留を検出していない場合はシャッタを閉状態に切り換え、シャッタを開状態に維持している状態では、制御手段が、穀粒排出口の移動を検知したときに再び穀粒センサが穀粒の滞留を検出しているか否かを判別し、穀粒センサが穀粒の滞留を検出している場合はシャッタを開状態に維持し、滞留を検出していない場合はシャッタを閉状態に切り換えるように構成する。
(もっと読む)
コンバイン

【課題】複数の遠隔操作装置が操作された場合であっても、排出オーガの誤作動を防止するとともに、この排出オーガの穀粒排出作業の作業性を向上させることができるコンバインを提供する。
【解決手段】コンバイン1は、前記制御手段60は、前記複数の遠隔操作装置(第一及び第二遠隔操作装置80・180)に優先順位を設定し、前記複数の遠隔操作装置(第一及び第二遠隔操作装置80・180)のうち少なくとも2つ以上の遠隔操作装置(第一及び第二遠隔操作装置80・180)から同時に操作信号を受信した場合、その2つ以上の遠隔操作装置(第一及び第二遠隔操作装置80・180)のうち最も優先順位が高い遠隔操作装置(第一遠隔操作装置80)から受信した操作信号に対応して前記作動用アクチュエータ(各アクチュエータ35・37・41)を駆動制御して、前記排出オーガ32を作動させる。
(もっと読む)
コンバイン
【課題】排出オーガを遠隔操作する遠隔操作装置の操作性を向上させることができるコンバインを提供する。
【解決手段】コンバイン1において、制御手段60は、操作手段の操作の開始から予め設定された設定時間T2経過するまでの間は、排出オーガ32の昇降速度及び旋回速度が第一の設定速度になるように、各アクチュエータ35・37を制御し、設定時間T2経過以降は、排出オーガ32の昇降速度及び旋回速度が第一の設定速度よりも速い第二の設定速度になるように、各アクチュエータ35・37を制御する。
(もっと読む)
コンバイン
【課題】穀粒排出コンベヤの送出終端側を穀粒送出方向に簡単に延長できるものでありながら、グレンタンクから穀粒を排出しないときには、穀粒排出コンベヤの送出終端側の開口を簡単に閉塞できるようにしたコンバインを提供する。
【解決手段】穀粒排出コンベヤ8の送出終端部に筒体支点軸68を介して回動可能に支持する穀粒排出筒体69と、穀粒排出筒体69を穀粒排出姿勢と穀粒非排出姿勢とに移動させる穀粒排出操作体70とを備え、穀粒排出筒体69の一部によって排出口シッャタ69aを形成し、穀粒非排出姿勢に穀粒排出筒体69が支持されているときに、前記排出口シャッタ69aによって、穀粒排出コンベヤ8の送出終端部の排出口を閉塞可能に構成している。
(もっと読む)
コンバイン
【課題】第1オーガ操作具によるオーガ操作と第2オーガ操作具によるオーガ操作とが競合しないように構成されたコンバインにおいて、制御部と第1オーガ操作具及び第2オーガ操作具との電気的接続や、制御部の処理手順を簡略化する。
【解決手段】第1オーガ操作具又は第2オーガ操作具からの操作信号に応じてオーガの駆動制御を行う制御部24とを備え、制御部24を第1オーガ操作具と第2オーガ操作具とから異なる種類の操作信号が同時に入力されると、一方の操作信号を優先するように構成したコンバインにおいて、制御部24が第1オーガ操作具と第2オーガ操作具とから異なる種類の操作信号が入力されると、先に入力された操作信号に基づいてオーガの駆動制御を行う。
(もっと読む)
コンバイン
【課題】中折れ式の排出オーガを伸長位置又は屈折位置の何れかに電動で切り換え得るコンバインにおいて、排出オーガの伸長/屈折動作時において周囲との干渉を防止することができるコンバインを提供する。
【解決手段】横オーガ7bは、先端部側の第2横オーガ7b2が基端部側の第1横オーガ7b1の側方に配置された回動軸330回りに回動することで、前記第2横オーガ7b2が前記第1横オーガ7b1に対して並列配置となる屈折位置Q1及び前記第2横オーガ7b2が前記第1横オーガ7b1と同軸配置となる伸長位置Q2の間を移動する。屈伸駆動機構X3は、前記第2横オーガ7b2を前記屈折位置Q1及び前記伸長位置Q2の間で移動させる。前記横オーガ7bが収納位置P2に位置した状態でのみ前記第2横オーガ7b2を前記屈折位置Q1及び前記伸長位置Q2の間で移動させるように前記屈伸駆動機構X3を制御する。
(もっと読む)
穀粒排出装置
【課題】穀粒排出筒2の自動収納時に、この穀粒排出筒2の自動短縮によって螺旋羽根間に穀粒を挟んでしまい、砕米や螺旋羽根の損傷が発生することを防止する。
【解決手段】グレンタンク(1)の内部から穀粒排出筒(2)先端部の穀粒排出口(7)に至る穀粒搬送経路中に穀粒検出センサ(8)を設け、該穀粒検出センサ(7)が搬送途中の穀粒を検出しなくなってから設定時間(T)が経過した後に自動旋回が開始された場合には、伸縮駆動装置(3)へ短縮作動出力が出力されて穀粒排出筒(2)が自動的に短縮し、穀粒検出センサ(7)が搬送途中の穀粒を検出しなくなってから設定時間(T)が経過する前に前記自動旋回が開始された場合には、伸縮駆動装置(3)への短縮作動出力が出力されないように、コントローラ(6)から伸縮駆動装置(3)への作動出力を牽制する。
(もっと読む)
コンバイン
【課題】同一の圃場内においても、防除や施肥の具合によって局部的に穀粒の収穫量が異なるが、その差異を具体的にかつ容易に認識することができるコンバインを提供する。
【解決手段】車体フレーム上にグレンタンクを配設すると共に、グレンタンク内に貯留される穀粒の重量を重量センサ33により検出するようにしたコンバインにおいて、車速を検出する車速センサ44と、車速センサ44と重量センサ33とをその入力側に接続したタイマー内蔵の制御手段42と、制御手段42の出力側に接続した表示パネル部46とを具備して、各センサの検出結果に基づいて制御手段42により圃場内の区画毎の穀粒の重量を算出し、その重量算出結果を表示パネル部46にマップ表示するようにした。
(もっと読む)
コンバイン
【課題】 制御操作の安定性や確実性に優れるとともに、機器への負荷を確実に抑制することができる穀物搬出オーガの動作制御機能を備えたコンバインを提供する。
【解決手段】 穀物搬出オーガ17の旋回駆動部49及び駆動停止部76を操作する操作部による穀物搬出オーガ17の旋回操作終了後、一定時間を経過した後に、駆動停止部76のオン・オフ作動を所定の時間間隔で繰り返し行うように制御する。
(もっと読む)
携帯電話を利用したコンバインの収穫状況表示装置
【課題】。コンバインによる稲等の収穫作業は、刈取から乾燥に至るまでの一連の作業を効率よく行うためには、作業の進行状態を関係作業者が知っておくことが必要であるが、従来の実情においては、圃場で収穫作業を行っているコンバインのオペレーター、一人にしか分からない課題があった。
【解決手段】この発明は、予め、目標収穫量Mを設定して行うコンバインの収穫作業において、制御手段2は、グレンタンク3の穀粒充填量を検出する穀粒センサ4が刈取開始から満タンに達するまでの検出時間の総和を所要時間Tとして求め、該所要時間Tを、指定の携帯電話5に送信する構成とした携帯電話を利用したコンバインの収穫状況表示装置としている。
(もっと読む)
1 - 10 / 10
[ Back to top ]