
Fターム[2B396QE25]の内容
脱穀機要素−籾処理 (10,947) | センサの配置又は取付け (201) | 取付位置 (159) | 穀粒搬送装置 (95) | 機外への搬送装置(排出筒) (80)
Fターム[2B396QE25]に分類される特許
41 - 60 / 80
脱穀装置の開閉操作装置及びコンバイン
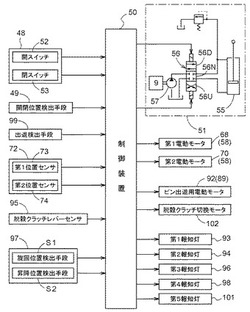
【課題】 脱穀経路で穀稈詰まりが生じた場合であっても、上部ケースの作業位置での固定解除を容易に行えるようにして、穀稈詰まりの対処を迅速に行えるようにすること。
【解決手段】 上部ケースの作業位置からの開操作を阻止する固定状態と開操作を許容する解除状態とに切り換え可能に構成された固定手段(58)、上部ケースを開閉駆動する開閉駆動手段(51)、上部ケースの開操作及び閉操作を指令する開閉指令手段(48)、固定手段を切り換え駆動する切換駆動手段(68,70)が設けられ、制御手段(50)が、開操作が指令されると、開閉駆動手段(51)を上部ケースの閉操作側に作動させた状態で固定手段(58)を固定状態から解除状態に切り換え、次に、上部ケースを開操作するべく、切換駆動手段(68,70)及び開閉駆動手段(51)の作動を制御するように構成されている脱穀装置の開閉操作装置。
(もっと読む)
コンバイン

【課題】走行機体に対して左右の走行装置をそれぞれ独立して昇降させる左右一対の走行部昇降装置を備え、前記走行機体の左右方向の傾斜調整を行い得るコンバインにおいて、排出オーガによる排出作業時に排出不良を防止し、安定した排出作業を行うことができるコンバインを提供する。
【解決手段】自動制御モード実行時且つオーガ検出センサ492からの信号に基づき排出オーガ7が格納位置から外れたと判断された場合、制御装置400により、左右一対の走行装置10の少なくとも何れか一方が走行機体2に対して最接近する(最下限位置となる)まで左右一対の走行部昇降装置がともに近接方向に作動する(車高を下げる)。そして、左右一対の走行装置10の少なくとも何れか一方が走行機体2に対して最接近した状態で、傾斜検出センサ450により検出される傾斜角度に応じて、制御装置400が走行機体2を水平角に自動制御する下限水平制御が行われる。
(もっと読む)
コンバイン
【課題】穀粒タンクの全体重量を測定することなく、収穫量の推定精度を高める。
【解決手段】選別した穀粒を貯留する穀粒タンク3と、該穀粒タンク3内の穀粒を機外に排出する排出オーガ4とを備えるコンバイン1において、排出オーガ4の排出口4aに、該排出口4aから排出される穀粒の流量を検出する排出センサ12を設ける。
また、排出センサ12の検出値を入力する制御部13を備え、該制御部13は、排出センサ12の検出値を積算し、該積算値に基づいて収穫量を推定する収穫量推定処理を行う。
(もっと読む)
コンバイン
【課題】 折り畳み可能なスクリューコンベアを採用するにあたり、二つ折り箇所からの穀粒の散乱や、二つ折り姿勢のスクリューコンベアの損傷や変形が生じることを回避する。
【解決手段】 スクリューコンベアAが折り畳み姿勢であることを検出する検出手段37を設け、その検出手段37が折り畳み姿勢を検出すると、スクリューコンベアAの駆動を停止する搬出駆動停止手段50を設けてある。
(もっと読む)
穀粒排出装置
【課題】穀粒排出筒2の自動収納時に、この穀粒排出筒2の自動短縮によって螺旋羽根間に穀粒を挟んでしまい、砕米や螺旋羽根の損傷が発生することを防止する。
【解決手段】グレンタンク(1)の内部から穀粒排出筒(2)先端部の穀粒排出口(7)に至る穀粒搬送経路中に穀粒検出センサ(8)を設け、該穀粒検出センサ(7)が搬送途中の穀粒を検出しなくなってから設定時間(T)が経過した後に自動旋回が開始された場合には、伸縮駆動装置(3)へ短縮作動出力が出力されて穀粒排出筒(2)が自動的に短縮し、穀粒検出センサ(7)が搬送途中の穀粒を検出しなくなってから設定時間(T)が経過する前に前記自動旋回が開始された場合には、伸縮駆動装置(3)への短縮作動出力が出力されないように、コントローラ(6)から伸縮駆動装置(3)への作動出力を牽制する。
(もっと読む)
コンバイン
【課題】穀粒排出筒からの穀粒のこぼれ落ちの防止、及び穀粒排出筒の取り扱い性の向上を図る。
【解決手段】穀粒貯留タンク(6)内の底部から穀粒排出筒(8)内に至る穀粒移送経路中に穀粒検出センサ(6a,8a)を設け、該穀粒検出センサ(6a,8a)が貯留穀粒を検出している状態において穀粒排出筒(8)を機体上の格納位置側へ移動させる場合には排出筒(11)を自動的に上向きに回動させる自動回動制御を実行する。但し、穀粒検出センサ(6a,8a)が貯留穀粒を検出しない状態において穀粒排出筒(8)を機体上の格納位置側へ移動させる場合には排出筒(11)を上向き回動させないように排出筒(11)の自動回動制御を牽制する。
(もっと読む)
穀粒排出システム
【課題】穀粒排出オーガによる穀粒排出位置を自動的に移動させて穀粒容器内に空隙が無くなるように穀粒を充填し、穀粒容器の容積を有効に利用して穀粒の運搬作業の能率を高める。
【解決手段】運搬車両側の穀粒容器8内を撮影可能なカメラを設ける。そして、該カメラによって撮影された画像の分析結果に基づいて、コンバイン側の穀粒排出オーガの穀粒排出口3を移動制御できるように構成する。また、撮影された画面の各分割画面A〜Iにおける特定の色彩の占有比率或いは明暗の比率の変動に基づいて、穀粒の堆積状態を検出できるように構成する。また、各分割画面A〜Iにおける穀粒容器8の内壁部分を穀粒によって隠すべく、穀粒排出オーガの穀粒排出口3を移動制御する。
(もっと読む)
コンバイン
【課題】排出オーガの排出口近傍に排出オーガに負荷が掛からないような構造のフレコンバック吊り下げ用フックを設けて、フレコンバックをフックから外れにくくし、継続して穀物の排出を可能とするコンバインを提供する。
【解決手段】グレンタンク17内の穀粒を機外に排出するための排出オーガ21を有するコンバイン11において、前記排出オーガ21先端部の排出口24の両側にフック80を設け、該フック80によりフレコンバック90を吊り下げ支持するように構成するとともに、前記フック80は上下にスライド可能に構成され、かつ、保持手段85により設定荷重で保持されるように構成した。
(もっと読む)
コンバインの穀粒排出構造
【課題】 コンバインの穀粒排出構造において、オーガの排出口から穀粒をトラックの荷台に排出する状態、及びオーガの排出口から穀粒を籾袋に排出する状態に適切に対応することができるように構成する。
【解決手段】 オーガ8の排出口12からの穀粒の排出を許容する排出許容姿勢A2及びオーガ8の排出口12からの穀粒の排出を阻止する排出阻止姿勢A1に切換自在な排出切換部材29を、オーガ8の排出口12に備える。オーガ8が排出状態であると排出切換部材29が排出許容姿勢A2となり、オーガ8が排出停止状態であると排出切換部材29が排出阻止姿勢A1となる第1モードと、オーガ8に関係なく排出切換部材29が排出許容姿勢A2となる第2モードとを設定して、第1及び第2モードを選択可能に構成する。
(もっと読む)
コンバインの穀粒排出構造
【課題】 コンバインの穀粒排出構造において、オーガの排出口から穀粒をトラックの荷台に排出する状態や、オーガの排出口から穀粒を籾袋に排出する状態の場合、作業能率を向上させる。
【解決手段】 オーガ8の排出口12からの穀粒の排出を許容する排出許容姿勢A2及びオーガ8の排出口12からの穀粒の排出を阻止する排出阻止姿勢A1に切換自在な排出切換部材29を、オーガ8の排出口12に備える。オーガ8の移動速度が高速であると排出切換部材29が排出阻止姿勢A1に操作され、オーガ8の移動速度が低速であると排出切換部材29が排出許容姿勢A2に操作されるように構成する。
(もっと読む)
コンバインの穀粒排出構造
【課題】 コンバインの穀粒排出構造において、排出切換部材をオーガの排出口に備えた場合、排出切換部材やオーガの排出口の破損を防止する。
【解決手段】 オーガ8の排出口12からの穀粒の排出を許容する排出許容姿勢A2及びオーガ8の排出口12からの穀粒の排出を阻止する排出阻止姿勢A1に切換自在な排出切換部材29を、オーガ8の排出口12に備える。穀粒の存否を検出する穀粒存否センサー30を排出切換部材29に備える。
(もっと読む)
コンバインのアンローダ
【課題】旋回範囲を360度以上確保することのできるコンバインのアンローダを、構造を簡素化することによって低コストで実現する。
【解決手段】横オーガを旋回可能に構成してあるコンバインのアンローダにおいて、アンローダの旋回部位8又は固定部位14の一方に突起部10aを備えるとともに、アンローダの旋回部位8又は固定部位14の他方に突起部10aが周方向における正逆方向から接当することによって横オーガの旋回範囲を規制する規制部20を備え、この規制部20を、突起部10aが周方向における正逆方向から接当すると所定の小範囲で正逆変位するように構成する。
(もっと読む)
コンバイン
【課題】排出作業時に穀粒の流れを運転席から目視でき、さらに排出作業時の排出オーガの姿勢によらず、上方からの籾の接触による誤作動を発生させない詰まり防止センサーを備えるコンバインを提供する。
【解決手段】グレンタンク13と排出オーガ15を備え、前記排出オーガ15先端部に配設され、下方に開口する排出口36と、前記開口部の先端略前後中途部分から前下方に延設された延長投口60と、前記延長投口60の内面下部に配設された詰まり防止センサー63と、を有するコンバインにおいて、前記延長投口60の後側の側面及び後面を透明の材質で構成した投口シート62で覆い、該投口シート62の内側に詰まり防止センサー63を配置し、前記延長投口60の下端周囲から更に投口シート62を下方に延設した。さらに、前記詰まり防止センサー63の上部に屋根部材64を配置した。
(もっと読む)
コンバイン
【課題】アクチュエータを介して昇降または旋回動作可能な穀粒排出オーガを、オーガ操作具の手動操作により格納位置であるオーガレストのオーガ受け上に旋回して格納する際の作業性を向上させる。
【解決手段】オーガ操作具34により穀粒排出オーガ29を下降動作させる時、オーガ位置検出手段43,44によって穀粒排出オーガ29がオーガレスト35上方の所定位置にあることを検出すると、穀粒排出オーガ29がオーガレスト35に自動的に格納されるように、当該穀粒排出オーガ29を昇降動作させるアクチュエータ31への一定時間の下降出力制御を実行するように構成した。
(もっと読む)
オーガ制御装置
【課題】オーガ機構の所望旋回位置への移動操作を作業性良く行うことのできるオーガ制御装置を提供する
【解決手段】旋回用アクチュエータ134によってオーガ機構15を旋回軸線回りに旋回させるように構成されたコンバイン201のオーガ制御装置は、制御装置100と、オーガ機構15の旋回角度θを設定する旋回角度設定手段20と、オーガ機構15の旋回角度θsを検出する旋回角度検出手段40とを備え、制御装置100は、旋回角度設定手段20による旋回角度θを設定旋回角度として記憶し、該設定旋回角度θ及び旋回位置検出手段40による検出値θsに基づき、オーガ機構15が該設定旋回角度θに位置するように旋回用アクチュエータ134を作動させる。
(もっと読む)
コンバイン
【課題】排出オーガの収納時に発生する無駄な時間を省き、速やかに作業に復帰することを可能とし、穀粒搬送作業を潤滑に進めることのできるコンバインを提供する。
【解決手段】縦排出オーガ15aと横排出オーガ15bから構成される穀粒排出オーガ15と、該穀粒排出オーガ15を旋回させる旋回装置34と、前記穀粒排出オーガ15を昇降させる昇降装置30とを備えたコンバインにおいて、前記横排出オーガ15bの旋回角度と仰角を測定するための測定手段35及び37を備え、排出位置を検知するとともに、排出位置から予め設定した機体干渉を避ける位置までの水平方向と垂直方向の距離を演算し、旋回装置34と昇降装置30を同時に駆動して機体干渉を避ける位置まで到達するように前記旋回34装置及び昇降装置30を制御した。
(もっと読む)
穀粒排出装置および該装置を配設する汎用コンバイン
【課題】バケットコンベアを内設する穀粒排出装置の誤作動を抑制しうる装置を提供する。
【解決手段】穀粒吐出口を設けたフード部とその下部に連設された外筒部とからなる外装体と、前記外装体の内部にバケットコンベアが配設され、前記バケットコンベアのバケット排出口と前記フード部の吐出口とが連設される穀粒排出装置において、前記フード部内壁であって、前記バケットから排出される穀粒の流れと平行する壁に圧力センサが設けられたことを特徴とする。前記圧力センサの感知面に圧力分散部材が配設されていてもよい。簡便な機構で、圧力センサの誤作動を防止することができる。
(もっと読む)
コンバイン
【課題】排出オーガの旋回位置を検出するポテンショメータのセットアップ作業の簡略化。
【解決手段】オーガ自動スイッチの操作を判断しS12、オーガ自動スイッチが操作されると、オーガ旋回ポテンショの検出値が基準範囲であるか否かを判断しS13、基準値範囲に対するオーガ旋回ポテンショ値の大小を判断しS14、オーガ旋回ポテンショ値が基準範囲よりも小さい場合には、オーガ旋回モータを右方向に駆動させS15、オーガ旋回ポテンショ値が基準範囲よりも大きい場合には、オーガ旋回モータを左方向に駆動させS16、オーガ旋回モータの駆動中は、間隔の長い断続音を電子ブザー50から出音させS17、オーガ旋回モータの駆動に応じてオーガ旋回ポテンショ値が基準範囲に入ったら、オーガ旋回モータの駆動を停止させると共に、間隔の短い断続音を電子ブザー50から出音させS18、オーガ自動セットアップ制御を終了する。
(もっと読む)
粉粒体搬送装置
【課題】穀粒を移送排出する移送排出筒装置の伸縮自在な移動用移送筒へ軸支内装した移動螺旋軸の前後両側へ前・後移動移送螺旋を設け、これら前・後移動移送螺旋間に複数の中移動移送螺旋を軸支して設けると共に、該前移動移送螺旋の全長を、使用する機種に応じ変えて、構成をシンプルにしようとするものである。
【解決手段】穀粒を移送排出する移送排出筒装置6の固定用移送筒8の外周部へ伸縮自在に挿入した移動用移送筒13へ軸支内装した移動螺旋軸9の前後両側に前・後移動移送螺旋11,10を軸支して設けると共に、該前・後移動移送螺旋11,10間へ複数の中移動移送螺旋12を軸支して設け、該前移動移送螺旋11の全長L5を、変更可能に構成する。
(もっと読む)
粉粒体搬送装置
【課題】粉粒体の排出作業を容易で簡単にすると共に、排出作業開始の時に操作する排出スイッチの操作の視認性の向上を図ろうとするものである。
【解決手段】操作装置21aに排出スイッチ25aと、ランプ25bとを設け、該排出スイッチ25aの操作により、テンションモータ26aを始動させ、該テンションモータ26aで排出クラッチ装置26bを作動すべく設けた構成において、粉粒体を排出作業中に、前記排出スイッチ25aの切り操作により、排出クラッチ装置26cを停止制御すると共に、前記排出スイッチ25aのランプ25bを消灯制御する制御装置21fを設けたことを特徴とする粉粒体搬送装置の構成とする。
(もっと読む)
41 - 60 / 80
[ Back to top ]