
Fターム[2B396QE25]の内容
脱穀機要素−籾処理 (10,947) | センサの配置又は取付け (201) | 取付位置 (159) | 穀粒搬送装置 (95) | 機外への搬送装置(排出筒) (80)
Fターム[2B396QE25]に分類される特許
21 - 40 / 80
伸縮式穀粒排出オーガ
【課題】伸縮式穀粒排出オーガによる穀粒排出作業を中断してこのオーガを短縮させる際に、オーガ内に残留した穀粒の圧縮を防止して該オーガの螺旋の破損を防止する。
【解決手段】伸縮式穀粒排出オーガにおいて、伸縮搬送螺旋(1)の基部側を、固定搬送螺旋(3)の先端側にワンウェイクラッチ(8)を介して伝動可能に連結し、伸縮搬送螺旋(1)は、排出クラッチ(9)の入り操作によって固定搬送螺旋(3)を介して伝動され、切り操作に伴って、伸縮用搬送筒(2)の制御モータ(10)から伝動される構成とし、伸縮搬送螺旋(1)は、伸縮用搬送筒(2)内の残留穀粒がほとんど無くなるまで伝動される構成とする。
(もっと読む)
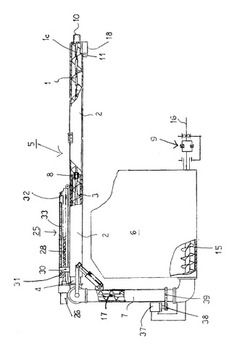
伸縮式穀粒排出オーガ

【課題】伸縮式穀粒排出オーガによる穀粒排出作業を中断してこのオーガを短縮させる際に、オーガ内に残留した穀粒の圧縮を防止して該オーガの螺旋の破損を防止する。
【解決手段】伸縮搬送螺旋(1)の基部を、固定搬送螺旋(3)の先端から穀粒の受継ぎを可能に接続するが、伝動上は分離、独立した伸縮式穀粒排出オーガ(5)を構成し、固定搬送螺旋(3)は、排出クラッチ(8)経由の動力で、伸縮搬送螺旋(1)は、搬送筒(2)に装備した制御モータ(9)で、それぞれ伝動される構成とし、制御モータ(9)は、排出クラッチ(8)の切り操作後、伸縮用搬送筒(2)内の残留穀粒が無くなるまで伸縮搬送螺旋(1)を伝動する構成とする。
(もっと読む)
コンバインの穀粒搬出装置
【課題】シャッタの開閉操作を自動化して操作性を改善するにあたり、シャッタが閉じられないままで穀粒がこぼれ落ちる不具合を回避でき、かつ汎用性も高める。
【解決手段】穀粒搬送部の搬送用スクリューの駆動を入り切りする搬出指令手段による駆動停止を指令する操作信号が入力されるに伴って、シャッタ駆動装置によるシャッタの開放姿勢は維持したままで、搬送用スクリューに対して駆動停止指令を出力し、かつ、旋回位置検出手段による搬送用筒体が基準格納位置に達したことの検出結果に基づいてシャッタ駆動装置に対してシャッタ閉塞姿勢側への作動指令を出力するように構成した。
(もっと読む)
コンバイン
【課題】排出オーガ内の穀粒が排出口から漏れ出す現象を防止できるコンバインの提供。
【解決手段】走行機体7と、穀粒を排出する排出口が形成されるとともに走行機体7側に昇降及び旋回可能に支持されて走行機体7側に収容された穀粒を排出口から排出せしめる排出オーガ12とを備え、穀粒を排出させる排出状態と排出させない非排出状態とに前記排出口を切換える切換手段を有し、排出オーガ12の昇降及び旋回と切換手段による前記切換の制御を行う制御部を設けたコンバインにおいて、排出オーガ12の旋回位置を検出する旋回位置検出手段を設け、排出オーガ12の旋回範囲D中に非排出範囲d1を設定するとともに旋回範囲Dにおける非排出範囲d1以外の範囲を排出範囲d2とし、排出範囲d2から非排出範囲d1に排出オーガ12が旋回されたことが旋回位置検出手段により検出された場合には、切換手段によって、非排出状態への切換を行う制御部を構成した。
(もっと読む)
コンバインの排出オーガ
【課題】排出シュータから搬送先内に穀粒を確実に投入できるとともに、排出オーガ内の穀粒詰まりを防止し得る、作業性を向上させたコンバインの排出オーガを提供する。
【解決手段】穀粒を貯留する穀粒タンク10に、貯留した穀粒を排出するための排出オーガ13を昇降かつ旋回自在に連通連設するとともに、排出オーガ13の先端部に備えた穀粒を排出する排出シュータ31は、この排出シュータ31の回動支点軸32(回動基部)を中心として、上下方向に回動自在に備えるとともに、排出シュータ31は、地面に平行な水平面に対する対地角度αおよび排出オーガ13の延長線に対する対排出オーガ角度θを変更可能にするとともに、排出オーガ13の昇降に応じて、対地角度αもしくは対排出オーガ角度θを制御する。
(もっと読む)
コンバイン
【課題】排出オーガを運転部の操作手段を用いて操作することが容易に可能となり、この排出オーガの操作時に横排出オーガが障害物と接触することを容易に回避させることができるコンバインを提供する。
【解決手段】コンバイン1は、前記穀粒排出装置50に、前記グレンタンク17の側方に軸心回りに回動自在に立設されて、このグレンタンク17内に下端側を連通させる縦排出オーガ71と、前記縦排出オーガ71の上端側に上下方向に回動自在に連結されて、この縦排出オーガ71に基端側を連通させるとともに、先端側に穀粒排出口72cを有する横排出オーガ72とを含み、前記横排出オーガ72の基端側に取り付けられて、この横排出オーガ72の先端側及びその先端側周囲の映像を撮影する第一の撮影装置100と、前記運転部9に配置されて、前記第一の撮影装置100が撮影した映像を表示する表示装置21と、を備える。
(もっと読む)
伸縮式穀粒排出オーガー
【課題】伸縮オーガーの移送筒を最長に伸長した排出作業中に、この排出作業を中断して短縮側に操作しても、筒内に残留している穀粒が伸縮螺旋の間に挟まれて破損したり、螺旋の伸縮部分が破損される等の障害が起きないようにする。
【解決手段】グレンタンクの伸縮式穀粒排出オーガー(4)において、伸縮用搬送筒(2)を、最長に伸ばして行っていた排出作業を中断して、伸縮螺旋(1)の駆動を停止した場合、伸縮用搬送筒(2)は、次工程で短縮側に操作すると、伸縮螺旋(1)の停止に伴って筒(2)内に残留する穀粒の全容量に対比して、搬送筒(2)内に形成される穀粒の滞留可能な空間(S)の全容積が大きく保てる位置を、最短の短縮位置に構成した。
(もっと読む)
コンバイン
【課題】オーガを支持位置に適切に旋回操作でき、オーガを支持位置に正確に位置決めできるコンバインを提供する。
【解決手段】グレンタンク及びオーガを機体の後部に備え、運転部及び受け部を機体の前部に備え、オーガの旋回操作範囲を、受け部の上方の支持位置P1と横向きの排出位置P2との間でかつ運転部の上方を通過しない範囲に設定し、オーガ又は支持部58の一方に被検出体66を設け、オーガ又は支持部58の他方に検出体68を設けて、オーガが支持位置P1に位置したことを検出する停止位置検出手段94を構成し、被検出体66又は検出体68の位置をオーガの旋回方向に沿って調節可能な停止位置調節機構70を設けてある。
(もっと読む)
コンバイン
【課題】排出作業時に、グレンタンクの昇降およびシューターの移動およびシャッタの開閉を、作業者が一々操作する必要があり、操作が面倒であるという課題がある。
【解決手段】機体フレーム1の下方に走行装置5を設け、機体フレーム1の上方位置に脱穀装置2を設け、脱穀装置2の側方の機体フレーム1の上方位置にグレンタンク3を設け、前記脱穀装置2の前側に刈取部6を設け、前記グレンタンク3の前方に操縦部4を設け、前記グレンタンク3は、前記機体フレーム1側に設けたタンク支持用フレーム12に昇降自在に取付け、前記グレンタンク3の排出部13には格納位置と張り出し位置の間移動自在のシューター15および開閉自在のシャッタ25を設け、前記グレンタンク3の昇降およびシューター15の移動および前記シャッタ25の開閉は、前記操縦部4に設けた操作器22による操作で自動的に行う構成としたことを特徴とするコンバイン。
(もっと読む)
ハイブリッドコンバイン
【課題】穀粒排出作業時に、穀粒排出口から排出される穀粒の運動エネルギー(又は位置エネルギー)を回生して収穫作業に利用し、エンジンの燃料消費量の低減と燃料資源の有効活用を図る。
【解決手段】走行装置(2)を備えた機台(3)の前側に刈取装置(8)を設け、機台(3)上にはエンジン(E)と脱穀装置(4)と穀粒貯留装置(5)を搭載し、前記穀粒貯留装置(5)に備える穀粒排出装置(60)の排出口(66)に、該排出口(66)から排出される穀粒によって従動回転する回転体(70)を設け、該回転体(70)の回転で駆動されて発電する発電機(73)を設け、該発電機(73)で発電された電力を蓄電する蓄電器(29)を設け、該蓄電器(29)からの電力で駆動してエンジン(E)による刈取装置(8)の駆動をアシストする電動モータ(40)を設ける。
(もっと読む)
コンバイン
【課題】先端排出筒の回動操作を自動制御操作と手動制御操作の双方で切換え操作できるようにし、手動操作手段による回動速度を自動操作手段による回動速度よりも遅くしたコンバインを提供する。
【解決手段】走行機体1と、刈取装置3及び脱穀装置5と、脱穀装置5で脱穀した穀粒を貯留するグレンタンク7と、グレンタンク7に連通して貯留穀粒を機外に排出する排出オーガ14とを具備したコンバイン100において、排出オーガ14のオーガ筒終端部に支軸を介して先端排出筒69を回動自在に連設し、先端排出筒69の上下方回動により排出オーガ14の終端開口部の開閉を行うべく構成し、しかも、先端排出筒69の上下方回動操作を自動制御操作により行う自動操作手段と、手動による制御操作を行う手動操作手段とを設けると共に、先端排出筒の手動操作手段による回動速度を自動操作手段による回動速度よりも遅くした。
(もっと読む)
作業車
【課題】移動体が所定の移動範囲を超えて移動したときにおいても、位置検出機構の故障を防止できる作業車を提供する。
【解決手段】アクチュエータMの駆動により移動可能な移動体8と、移動体8に取り付けられた被検出体31a、31bと、被検出体31a、31bに接触して揺動可能な接触子32aを有する位置検出機構32と、位置検出機構32にて被検出体31a、31bを検出するとアクチュエータMの駆動を停止させる制御機構とを設け、被検出体31a、31bに当接して移動体8の移動を規制する固定のストッパ33を設け、接触子32aが被検出体31a、31bに接触した状態を維持しながら、被検出体31a、31bがストッパ33に当接するように、位置検出機構32及びストッパ33を配置してある。
(もっと読む)
コンバインの穀粒搬出装置
【課題】横送り筒が下降側の停止予定箇所へ到達する前にその起伏揺動位置を検出するできるようにするとともに、起伏位置検出装置を、他物と干渉する可能性の少ない状態で、かつ、メンテナンス作業も行い易い状態で設ける。
【解決手段】縦送り筒55と、その縦送り筒55の上端側における水平方向の揺動軸心x周りで起伏揺動自在に構成された横送り筒56の起伏揺動位置を検出する起伏位置検出装置6を、前記縦送り筒55と横送り筒56との接続箇所55D,56Dにおける下向き面側に設けてある。
(もっと読む)
コンバインの伸縮式穀粒排出オーガ
【課題】先端側搬送筒の基端側搬送筒に対する伸縮移動によって搬送スクリュの搬送下流側スクリュ部と搬送上流側スクリュ部とが相対回転しながら伸縮移動するコンバインの伸縮式穀粒排出オーガにおいて、残留穀粒による障害を受けないで、しかも残留穀粒の損失を発生させないで短縮させ得るようにする。
【解決手段】搬送下流側スクリュ部40を穀粒搬出方向に回転しながら短縮移動させる。先端側搬送筒21の穀粒出口21aからの穀粒を貯留する貯留室98を形成した貯留姿勢と、先端側搬送筒21の穀粒出口21aからの穀粒を排出する排出路97を形成した排出姿勢とに切り換え自在な可動部材15を備えてある。搬送下流側スクリュ部40の短縮移動状態において可動部材15を貯留姿勢に自動的に切り換え操作する。
(もっと読む)
コンバインの穀粒排出オーガ制御装置
【課題】穀粒の排出が終了すると終了制御を行う穀粒排出制御において、穀粒排出オーガを点検するために空駆動したい場合には自動的に穀粒の排出作業中でないことを確認して、穀粒排出オーガの駆動を継続し、点検作業を落ち着いて行えるようにする。
【解決手段】穀粒排出オーガ6の駆動を断続する排出スイッチ30とグレンタンク5中或は穀粒排出オーガ6中の穀粒を検出する穀粒センサ4を設け、排出スイッチ30をオンした際に穀粒センサ4が穀粒の存在を検出すると穀粒の排出終了後に穀粒排出オーガ6の駆動停止或はさらに収納移動を自動的に行い、排出スイッチ30をオンした際に穀粒センサ4が穀粒の存在を検出しないと駆動を継続するように制御したことを特徴とするコンバインの穀粒排出オーガの構成とする。
(もっと読む)
コンバイン
【課題】アクチュエータを介して穀粒排出オーガを起伏または旋回作動させるオーガ操作具を穀粒排出オーガの先端部に設けたコンバインにおいて、無理なく良好な操作フィーリングで穀粒排出オーガの起伏または旋回作動が行なえるオーガ操作具を提供する.
【解決手段】オーガ操作具31を、上下左右の操作面31a,31b,31c,31dと、該操作面31a,31b,31c,31dの押動操作に対応する連動スイッチ32a,32b,32c,32dと、該連動スイッチ32a,32b,32c,32dを切り状態に復帰付勢する弾機35を有して上下左右方向に押動操作自在な多方向操作スイッチで構成し、該多方向操作スイッチの上下左右何れかの方向への押動操作に対応する連動スイッチが入り状態となった時、前記多方向操作スイッチの押動操作方向と同方向に穀粒排出オーガ13の起伏または旋回作動がなされるようにした。
(もっと読む)
コンバイン
【課題】穀粒排出オーガを伸縮させる負荷を軽減でき、穀粒排出オーガを無理なく伸縮できるコンバインを実現する。
【解決手段】コンバインにおいて、穀粒排出オーガ9を、機体側に位置する機体側部分9Aと、先端側に位置する先端側部分9Bとを備えて構成すると共に、機体側部分9Aを伸縮可能に構成して、機体側部分9Aが伸長し穀粒排出オーガ9の全長が伸長した伸長状態と、機体側部分9Aが短縮し穀粒排出オーガ9の全長が短縮した短縮状態とに、穀粒排出オーガ9の状態を切換可能に構成する。
(もっと読む)
コンバイン
【課題】中折れ式の排出オーガを伸長位置又は屈折位置の何れかに電動で切り換え得るコンバインにおいて、排出オーガの伸長/屈折動作時において周囲との干渉を防止することができるコンバインを提供する。
【解決手段】横オーガ7bは、先端部側の第2横オーガ7b2が基端部側の第1横オーガ7b1の側方に配置された回動軸330回りに回動することで、前記第2横オーガ7b2が前記第1横オーガ7b1に対して並列配置となる屈折位置Q1及び前記第2横オーガ7b2が前記第1横オーガ7b1と同軸配置となる伸長位置Q2の間を移動する。屈伸駆動機構X3は、前記第2横オーガ7b2を前記屈折位置Q1及び前記伸長位置Q2の間で移動させる。前記横オーガ7bが収納位置P2に位置した状態でのみ前記第2横オーガ7b2を前記屈折位置Q1及び前記伸長位置Q2の間で移動させるように前記屈伸駆動機構X3を制御する。
(もっと読む)
コンバインの穀粒排出装置
【課題】排出オーガを迅速に機体幅内に収納し、排出オーガが障害物に衝突して破損するような不具合を解消する。
【解決手段】排出オーガ(12)を自動収納する際に内部に穀粒の存在が感知された場合には、移動用移送筒(11)が最短縮位置まで短縮させない。また、排出オーガ(12)が中間長さでオーガ受け(34)に収納されている状態で、自動収納する際には、排出オーガ(12)を上昇させてオーガ受け(34)から離脱し、移動用移送筒(11)が最短縮位置まで短縮作動した後に排出オーガ(12)を下降させて収納する。
(もっと読む)
農作業機の制御装置
【課題】LAN又はCAN通信環境を複数のコントローラに適用した農作業機の制御装置において、従来よりも更に好適な制御構造を構築する。
【解決手段】本願発明の制御手段150は、各入力系機器からの入力制御に特化した入力専用コントローラ151aと、各出力系機器への出力制御に特化した出力専用コントローラ151bと、プログラム処理に特化した制御専用コントローラ151cと、各コントローラ間を接続するCAN通信バス152とを有する。各入力系機器からの入力情報は、入力専用コントローラ151aを介して制御専用コントローラ151cに伝送され、前記入力情報に基づき制御専用コントローラ151cにて得られた出力情報が、制御専用コントローラ151cから出力専用コントローラ151bを介して各出力系機器に伝送される。
(もっと読む)
21 - 40 / 80
[ Back to top ]