
Fターム[2C150DK09]の内容
Fターム[2C150DK09]の下位に属するFターム
テレビカメラを搭載 (27)
Fターム[2C150DK09]に分類される特許
1 - 17 / 17
玩具
【課題】玩具を提供すること。
【解決手段】無線リンクを介して、データを送信し、受信するための送受信機(24、28)と、プロセッサ(18、32)と、表現応答を記憶するためのメモリ(34)と、表現応答のための出力部(22、38)とを含み、表現応答に関するトリガーデータを受信し、トリガーデータが受信された場合に表現応答を選択し、前記出力部を介して前記表現応答を表現し、応答が出力されたことを示すトリガーデータを一斉送信するよう動作可能であることを特徴とする玩具が提供される。
(もっと読む)
ラジコンカー装置

【課題】ラジコンカー装置において、特に習熟を必要とせずに直ぐに操縦操作に馴染め、且つレーシングカーの運転と同様に操縦操作によって、その運転技術向上の練習装置としても使用できるようにする。
【解決手段】左右一対の前後輪12,13を備えた走行体1と走行体の各動作機構の動作制御信号を発する操縦用送信機で構成され、走行本体11が、後輪に駆動機構16を備え、前輪に舵取り機構14と駆動機構から独立したブレーキ機構15を備えてなり、操縦用送信機が、前記駆動機構、舵取り機構及び前記各機構の動作制御信号を同時にも送ることができる独立した各操縦用の操作部を備えてなる。
(もっと読む)
被操縦体の無線操縦装置
【課題】カメラを使用せずにモデルデータと被操縦体の画像データを関連付けて記憶させることができる無線操縦装置を提供する。
【解決手段】無線操縦装置1は、被操縦体の操作部2と、各被操縦体に対応した複数のモデルデータを記憶する記憶部4と、被操縦体を撮影して画像データを取得するカメラモジュール3と、被操縦体の画像データを対応する被操縦体のモデルデータと関連付けて記憶部に記憶させる制御部5を有している。モデルデータの呼び出し後、カメラモジュール3で被操縦体を撮影すれば、モデルデータと画像データをリンクして記憶させることができる。呼出し時には、被操縦体の画像を選択すれば、その画像に対応したモデルデータを装置に設定できる。
(もっと読む)
コントローラ、模型装置、およびコントロール方法
【課題】模型装置がユーザの意図しないエリア内へと移動してしまう可能性を低減する。
【解決手段】コントローラ100は、模型装置から模型装置の現在位置を受信するための通信インターフェイス170と、模型装置の移動許可エリアの指定を受け付けるための入力部132,150と、模型装置を移動させるための命令を受け付けて、模型装置の位置に基づいて命令によって模型装置が移動許可エリアから出るか否かを判断し、模型装置が移動許可エリアから出ない場合に通信インターフェイスを介して命令を模型装置に送信し、模型装置が移動許可エリアから出る場合に模型装置に命令を送信しないプロセッサ110とを備える。
(もっと読む)
玩具セット、ゲーム制御プログラム、及びゲーム装置・玩具間交信システム
【課題】ゲーム装置のハードウェア構成を変えずに該装置と玩具との間で交信できる玩具セットを提供する。
【解決手段】玩具セットは、玩具と記憶媒体とから成り、記憶媒体に格納されるプログラムは、ゲーム装置の制御手段により実行されたとき、該装置に単一振動数の音を検出するフィルター手段と、検出された時系列的に配列された音の組合せに対応して音声等を出力させる出力手段と、単一振動数の複数の音を生成する生成手段と、該音の組合せにより制御信号を生成してゲーム装置の発音手段から送出する送出手段を構成するよう構成され、玩具は、発音手段と音声入力手段と制御手段と感知手段とを内蔵し、操作に応じて音声を出力し、制御手段は、単一振動数の複数の音を生成する生成手段を備え、該音の組合せにより制御信号を生成して玩具の発音手段から送出するように形成され、玩具は、ゲーム装置からの制御信号を入力し、該信号に対応して所定の動作を行う。
(もっと読む)
頭部運動による入力装置及び方法
【課題】ロボットや無線操縦機器などの産業・娯楽機器や、電動車椅子や電子文字盤などの福祉機器を直観的なインターフェースで操作することが望まれているが、習得が難しい問題や、利用制約が大である問題があった。
【解決手段】操作者のジョイスティック的な頭部運動を検出する傾斜センサ等を、頭部に装着し、ヘッドマウントディスプレイ等で表示することにより、直観的なインターフェースで、外部機器や仮想空間の物体を操作できる。
(もっと読む)
コミュニケーション誘発システム
【課題】ぬいぐるみのような擬人的媒体を使ってユーザからのコミュニケーションを誘発できるシステムを提供する。
【解決手段】コミュニケーション誘発システム10は、ユーザ12の前方に配置されたぬいぐるみ14を含む。視線サーバ18がカメラ16で撮影したユーザ12の顔の画像からユーザの視線の方向を推定する。ぬいぐるみ14に内蔵したコンピュータは、ユーザの発話状態およびユーザの視線状態に応じて両者の間のコミュニケーション状態を推定または特定する。そして、そのコミュニケーション状態に従ってユーザにコミュニケーションを促すことができるように、ぬいぐるみの行動(発話および/または動き)を制御する。
(もっと読む)
スピーカ制御装置、ロボット、スピーカ制御方法、およびスピーカ制御プログラム
【課題】健聴者および難聴者の双方にとって適切になるように、スピーカの発する音を自動で制御することが可能なスピーカ制御装置等を提供する。
【解決手段】実施形態のスピーカ制御装置は、第一の人の位置と第二の人の位置とを検出する人物認識手段201と、第一および第二の人の位置に基づいて、第二のスピーカ102の指向性の範囲内に第二の人が入り且つ第一の人が入らないような、第二のスピーカ102の位置の範囲を算出する配置算出手段301と、当該範囲内に入るように、第二のスピーカ102の位置を変更する動作手段401と、第一の人に到達する第一のスピーカ101の音量が所定の範囲内となり、且つ、第二の人に到達する第二のスピーカ102の音量が所定の範囲内となるように、第一のスピーカ101および第二のスピーカ102の音量を調整する音量補償手段501と、を備えている。
(もっと読む)
組み立てキット、組み立てキットの製造方法、及び組み立てキット情報提供装置
【課題】 様々な要求・要望に応え得る多種多様の彩色が容易且つ安価に施された組み立てキットを提供する。
【解決手段】 ユーザが組み立てて完成態様を得るべく、複数のパーツを備えてなる組み立てキットであって、前記各パーツ2、3a、3b及び4の表面に印刷により彩色が施されている。印刷はインクジェットプリンタを用いるが、前記各パーツは、彩色が施されている表面が順テーパ状で外方に突出する形状となるように成形されてなるため、各パーツの全ての表面に対して容易に印刷が可能である。
(もっと読む)
ロボットにおける対話相手識別方法およびロボット
【課題】安価に、かつ信頼性高く、対話相手(人またはロボット)の識別、方向判別を可能とし、対話相手に応じた対話/サービスの提供を可能とすること。
【解決手段】対話ロボット10の身体(例えば胴回り)に、複数方向に向けて配置した赤外線発受信ユニット11を設け、ユーザ(人間)20はユーザの識別信号を発信する赤外線発受信ユニット21を装着する。ロボット10は、上記赤外線発受信ユニットの、どの受信器によって相手からの赤外線が受信されたかによって、対応する相手が自分からみてどちら方向にいるかを知り、また、受信した識別信号を解読することによって、対応する相手が誰かを知る。そして、ロボット10は、その顔部(頭部)あるいは身体の向きを検出されたユーザ方向に向け、識別した相手に応じた対話/サービス内容を選択し、上記相手に対して言語・非言語に基づく対話/サービスを行う。
(もっと読む)
脚式移動ロボットの制御装置
【課題】会社などの来訪者に合わせた案内動作を十分に実現して来訪者とのコミュニケーションを高めるようにした脚式移動ロボットの制御装置を提供する。
【解決手段】ロボットの移動環境において所定距離内に来訪者(案内相手)が存在するか否か識別し(S12)、来訪者が識別されたとき(S14)、脚部アクチュエータなどの動作を制御し、移動環境において識別された来訪者を目的地まで地図に従って案内する(S16からS44)。
(もっと読む)
自律移動ロボットおよび自律移動ロボットによる物品運搬方法
【課題】自立移動ロボットが物品を取得元から主体的に受け取り、制振制御により揺れを押さえて運び、届け先に確実に届けることを可能とする。
【解決手段】物品の運搬には所定の仕様の運搬容器(M)を用いる。運搬容器には、画像識別のためのパタン(M2)および把持に適した形状の把持部分(M3)を備える。ロボット(R)は、取得元の画像から、運搬すべき物品を載せた所定仕様の運搬容器の把持に適した所定位置を認識する把持位置認識手段261と、把持部を運搬容器の所定位置に駆動し、所定位置を把持する制御を行う把持制御手段262と、把持部に作用する外力に基づいて把持に成功したか否かを判断する把持成否判定手段245とを備える。さらに、運搬中に、把持部に作用する外力を打ち消す帰還制御を行うことにより把持部の振動を押さえる制振制御手段410を備える。
(もっと読む)
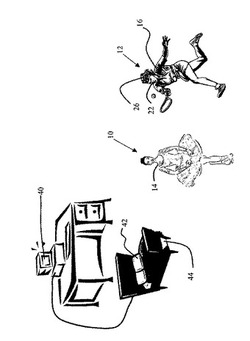
玩具
無線リンクを介して、データを送信し、受信するための送受信機(24、28)と、プロセッサ(18、32)と、表現応答を記憶するためのメモリ(34)と、表現応答のための出力部(22、38)とを含み、表現応答に関するトリガーデータを受信し、トリガーデータが受信された場合に表現応答を選択し、前記出力部を介して前記表現応答を表現し、応答が出力されたことを示すトリガーデータを一斉送信するよう動作可能であることを特徴とする玩具が提供される。第2の玩具(12)のある所にある第1の玩具(10)からの第1の表現応答をアクティブにするステップと、前記第1の玩具(10)から前記第2の玩具(12)に、前記第1の表現応答を示すトリガーデータを送信するステップと、前記第2の玩具(12)が、前記データを受信した際に、メモリ(34)から第2の表現応答を選択し、前記第2の表現応答をアクティブにし、前記第1の玩具(10)に対する前記第2の表現応答を示すトリガーデータを送信するステップとを含むことを特徴とする第1(10)及び第2(12)の玩具間の交信の方法が提供される。 (もっと読む)
無人ヘリコプタの重量物配置構造
【課題】 空気抵抗を小さくして出力損失を軽減し、安定した飛行制御が可能な無人ヘリコプタの重量物配置構造を提供する。
【解決手段】 地上からのリモコン操作によるマニュアル飛行制御及び機体に搭載した自律制御装置による自律飛行制御が可能な無人ヘリコプタ1において、機体4の左右外側のうち一方のみに、重量物を搭載した。前記重量物は、例えば前記自律制御装置を収納した自律制御ボックス15である。
(もっと読む)
キャラクター操作システム及びプログラム並びに方法
【課題】観察者に親しみを与える腹話術型のキャラクター操作システムを実現する。
【解決手段】本発明の一態様のキャラクター操作システム1は、操作者発声モードかキャラクター発声モードかの設定を受けるモード制御手段4と、操作者2の音声データを入力する音声入力手段5と、操作者2の画像データを入力する画像入力手段8と、操作者2の音声データが入力されていないと判断された場合に、画像入力手段8によって入力された操作者2の画像データを操作者の無発声状態の画像データとして記憶する記憶手段9と、キャラクター発声モードが設定されている場合に、操作者の無発声状態の画像データをキャラクター13側に出力し、操作者発声モードが設定されている場合に、画像入力手段8によって入力された操作者2の画像データをキャラクター13側に出力する画像出力手段15と、音声入力手段5によって入力された操作者2の音声データを、キャラクター13側に出力する音声出力手段14とを具備する。
(もっと読む)
玩具
【解決手段】 部屋の内部には、部屋の前面から目視可能な透明LCDスクリーンが壁、天井、床に接して配置され、LCDスクリーンの前部および後部には椅子等の内装体や木、塀、犬小屋等の外装体が配置され、LCDスクリーンには、女の子のキャラクタや動物キャラクタが表示されるようになっており、ユーザは、LCDスクリーンのキャラクタや内装体および外装体を見ながらゲームを楽しむことができる。 (もっと読む)
ロボット装置及びその制御方法
【課題】マイク、カメラや種々のセンサで検出することが困難であった外部に存在する対象の情報の正確な確認や識別を可能とするロボット装置を提供する。
【解決手段】自律的に行動を出現させると共に、外部からの入力情報に応じて行動が制御されるロボット装置は、外部に存在する対象に設けられた無線タグ、いわゆるRFID(Radio Frequency Identification)タグから、該RFIDタグに記憶されているデータを読み取る無線タグ読取手段であるRFIDリーダ部19と、RFIDリーダ部19により読み取られたデータに応じた上記対象に関連する情報である対象関連情報に対応する状態認識情報に基づいて行動を制御するコントローラ10とを有する。
(もっと読む)
1 - 17 / 17
[ Back to top ]