
キャラクター操作システム及びプログラム並びに方法
【課題】観察者に親しみを与える腹話術型のキャラクター操作システムを実現する。
【解決手段】本発明の一態様のキャラクター操作システム1は、操作者発声モードかキャラクター発声モードかの設定を受けるモード制御手段4と、操作者2の音声データを入力する音声入力手段5と、操作者2の画像データを入力する画像入力手段8と、操作者2の音声データが入力されていないと判断された場合に、画像入力手段8によって入力された操作者2の画像データを操作者の無発声状態の画像データとして記憶する記憶手段9と、キャラクター発声モードが設定されている場合に、操作者の無発声状態の画像データをキャラクター13側に出力し、操作者発声モードが設定されている場合に、画像入力手段8によって入力された操作者2の画像データをキャラクター13側に出力する画像出力手段15と、音声入力手段5によって入力された操作者2の音声データを、キャラクター13側に出力する音声出力手段14とを具備する。
【解決手段】本発明の一態様のキャラクター操作システム1は、操作者発声モードかキャラクター発声モードかの設定を受けるモード制御手段4と、操作者2の音声データを入力する音声入力手段5と、操作者2の画像データを入力する画像入力手段8と、操作者2の音声データが入力されていないと判断された場合に、画像入力手段8によって入力された操作者2の画像データを操作者の無発声状態の画像データとして記憶する記憶手段9と、キャラクター発声モードが設定されている場合に、操作者の無発声状態の画像データをキャラクター13側に出力し、操作者発声モードが設定されている場合に、画像入力手段8によって入力された操作者2の画像データをキャラクター13側に出力する画像出力手段15と、音声入力手段5によって入力された操作者2の音声データを、キャラクター13側に出力する音声出力手段14とを具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えばロボットなどのキャラクターを操作者が操作するキャラクター操作システム及びプログラム並びに方法に関する。
【背景技術】
【0002】
ロボット作業現場に存在するロボットを、操作者が遠隔操作する技術が広く用いられている。
【0003】
また、操作者自身の顔画像を操作者の分身(アバタ)としてロボットの顔部分に表示する技術が検討されている(非特許文献1参照)。
【非特許文献1】Susumu Tachi, “Telexistence and Retro-reflective Projection Technology (RPT)”, Proceedings of the 5th Virtual Reality International Conference (VRIC2003), 2003年5月, pp.69/1-69/9
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の非特許文献1において、操作者の現実の顔画像とロボットの機械的なボディとを調和した状態で組み合わせることは困難であり、ロボットの観察者が操作者の顔画像とロボットのボディとのギャップから違和感を持つ場合がある。
【0005】
したがって、操作者自身の顔画像をロボットの顔部分に表示した場合においては、ロボットの観察者に、親しみを持たせることが困難である。
【0006】
本発明は、以上のような実情に鑑みてなされたもので、観察者に親しみを与える腹話術型のキャラクター操作システム及びプログラム並びに方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の第1の態様に係るキャラクター操作システムは、キャラクターを操作する操作者による発声を行う操作者発声モードかキャラクターによる発声を行うキャラクター発声モードかの設定を受け付けるモード制御手段と、操作者の音声データを入力する操作者側音声入力手段と、操作者の画像データを入力する操作者側画像入力手段と、操作者の音声データが入力されているか否か判断し、操作者の音声データが入力されていないと判断された場合に、操作者側画像入力手段によって入力された操作者の画像データを操作者の無発声状態の画像データとして記憶する記憶手段と、キャラクター発声モードが設定されている場合に、操作者の無発声状態の画像データをキャラクター側に出力し、操作者発声モードが設定されている場合に、操作者側画像入力手段によって入力された操作者の画像データをキャラクター側に出力するキャラクター側画像出力手段と、操作者側音声入力手段によって入力された操作者の音声データを、キャラクター側に出力するキャラクター側音声出力手段とを具備する。
【0008】
これにより、キャラクターが発声している場合に操作者の画像は無発声の状態とすることができ、腹話術型のキャラクター操作を行うことができる。
【0009】
上記キャラクター操作システムにおいて、キャラクター発声モードが設定されている場合に、記憶手段に記憶されている操作者の無発声状態の画像データをキャラクター側画像出力手段に提供し、操作者発声モードが設定されている場合に、操作者側画像入力手段によって入力された操作者の画像データをキャラクター側画像出力手段に提供する画像スイッチをさらに具備するとしてもよい。
【0010】
上記キャラクター操作システムにおいて、キャラクター発声モードが設定されている場合に、操作者の音声データをキャラクター用の音声データに変換する音声変換手段をさらに具備し、キャラクター側音声出力手段は、キャラクター発声モードが設定されている場合に、キャラクター用の音声データをキャラクター側に出力し、操作者発声モードが設定されている場合に、操作者側音声入力手段によって入力された操作者の音声データをキャラクター側に出力するとしてもよい。
【0011】
これにより、キャラクターにあった声により腹話術型のキャラクター操作を行うことができる。
【0012】
このキャラクター操作システムにおいて、キャラクター発声モードが設定されている場合に、操作者側音声入力手段によって入力された操作者の音声データを音声変換手段に提供し、操作者発声モードが設定されている場合に、操作者側音声入力手段によって入力された操作者の音声データをキャラクター側音声出力手段に提供する音声スイッチをさらに具備するとしてもよい。
【0013】
上記キャラクター操作システムにおいて、キャラクター側の状態を撮影した画像データを操作者側に出力する操作者側画像出力手段と、キャラクター側の音の状態を測定した音データを操作者側に出力する操作者側音出力手段とをさらに具備するとしてもよい。
【0014】
これにより、操作者はキャラクター側の反応を観察しつつ、腹話術型のキャラクター操作を行うことができる。
【0015】
本発明の第2の態様に係るキャラクター操作装置は、キャラクターを操作する操作者側に備えられる操作者側音声入力装置及び操作者側画像入力装置と、キャラクター側に備えられるキャラクター側画像出力装置及びキャラクター側音声出力装置とに接続され、操作者による発声を行う操作者発声モードかキャラクターによる発声を行うキャラクター発声モードかの設定を受け付けるモード制御手段と、操作者側音声入力装置によって操作者の音声データが入力されているか否か判断し、操作者の音声データが入力されていないと判断された場合に、操作者側画像入力装置によって入力された操作者の画像データを操作者の無発声状態の画像データとして記憶する記憶手段と、キャラクター発声モードが設定されている場合に、記憶手段に記憶されている操作者の無発声状態の画像データをキャラクター側画像出力装置に提供し、操作者発声モードが設定されている場合に、操作者側画像入力装置によって入力された操作者の画像データをキャラクター側画像出力装置に提供する画像スイッチと、操作者側音声入力装置によって入力された操作者の音声データを、キャラクター側音声出力装置に提供する提供手段とを具備する。
【0016】
これにより、キャラクターが発声している場合に操作者の画像は無発声の状態とすることができ、腹話術型のキャラクター操作を行うことができる。
【0017】
上記キャラクター操作装置において、キャラクター発声モードが設定されている場合に、操作者の音声データをキャラクター用の音声データに変換する音声変換手段をさらに具備し、提供手段は、キャラクター発声モードが設定されている場合に、操作者側音声入力装置によって入力された前記操作者の音声データを音声変換手段経由でキャラクター側音声出力装置に提供し、操作者発声モードが設定されている場合に、操作者側音声入力装置によって入力された操作者の音声データをキャラクター側音声出力装置に提供する音声スイッチであり、キャラクター側音声出力装置は、キャラクター発声モードが設定されている場合に、キャラクター用の音声データをキャラクター側に出力し、操作者発声モードが設定されている場合に、操作者側音声入力装置によって入力された操作者の音声データをキャラクター側に出力するとしてもよい。
【0018】
これにより、キャラクターにあった声により腹話術型のキャラクター操作を行うことができる。
【0019】
なお、上記の態様はシステム又は装置として表現されている。しかしながら、これに限らず、上記の態様は、方法、プログラム、コンピュータ読み取り可能な記憶媒体などで表現されるとしてもよい。
【発明の効果】
【0020】
本発明により、観察者に親しみを与える腹話術型のキャラクター操作システム及びプログラム並びに方法を提供することができる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照しながら本発明の実施の形態について説明する。なお、以下の各図において同一の部分については同一の符号を付して説明を省略する。
【0022】
本実施の形態では、操作者とキャラクターとで簡単に腹話術を行うことができるキャラ
クター操作システムについて説明する。
【0023】
なお、以下においては、キャラクターがロボットの場合を例に説明する。しかしながら、このキャラクターは、例えばコンピュータ画面に表示されるバーチャルのキャラクター(例えば動物、人間、仮想的生物、創作された生物)でもよい。
【0024】
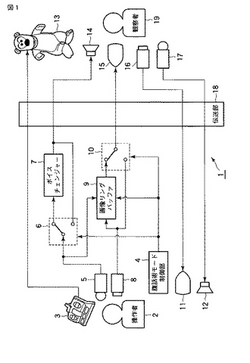
図1は、本実施の形態に係るキャラクター操作システムの構成の例を示すブロック図である。
【0025】
本実施の形態に係るキャラクター操作システム1は、操作者2側の装置として、ロボットモーション操作インタフェース3、腹話術モード制御部4、操作者側音声入力装置(例えばマイク)5、音声スイッチ6、ボイスチェンジャー7、操作者側画像入力装置(例えばカメラ)8、画像リングバッファ(無声画像記憶部)9、画像スイッチ10、操作者側画像出力装置(例えばディスプレイ)11、操作者側音出力装置(例えばスピーカ)12を具備する。
【0026】
また、キャラクター操作システム1は、ロボット13側の装置として、ロボット側音声出力装置14、ロボット側画像出力装置15、ロボット側画像入力装置16、ロボット側音入力装置17を具備する。なお、このロボット13側の各種装置のうち少なくとも一つは、ロボット13に内蔵されていてもよい。特に、ロボット側音声出力装置14のうちロボット13としての声を出力する部分については、ロボット13に内蔵されていることが望ましい。
【0027】
また、キャラクター操作システム1は、操作者2側の装置とロボット13側の装置との間でデータを送受信可能とする伝送部18を具備する。
【0028】
まず、操作者2側の装置について説明する。
【0029】
ロボットモーション操作インタフェース3は、操作者2によるロボット13の操作指令を受け付け、この指令内容を示す操作データを伝送部18経由でロボット13に送信する。
【0030】
腹話術モード制御部4は、操作者2からロボット発声モードか操作者発声モードかを指定するモード指定を受け付け、このモードの設定(選択)にしたがって、音声スイッチ6、画像スイッチ10を切り換えるとともに、画像リングバッファ9に記憶されている画像データの出力状態を制御する。
【0031】
ここで、ロボット発声モードは、ロボット13側において、操作者2の音声をロボット13の音声として出力する場合に選択される。一方、操作者発声モードは、ロボット13側において、操作者2の音声をそのまま操作者2の音声として出力する場合に選択される。
【0032】
音声スイッチ6は、操作者側音声入力装置5から操作者2の音声データを受け付ける。
【0033】
そして、音声スイッチ6は、腹話術モード制御部4においてロボット発声モードが設定されている場合、操作者2の音声データをボイスチェンジャー7に提供する。
【0034】
一方、音声スイッチ6は、腹話術モード制御部4において操作者発声モードが設定されている場合、操作者2の音声データを伝送部18経由でロボット側音声出力装置14に提供する。
【0035】
ボイスチェンジャー7は、腹話術モード制御部4においてロボット発声モードが設定されている場合に、操作者側音声入力装置5から音声スイッチ6経由で操作者2の音声データを受け付ける。
【0036】
そして、ボイスチェンジャー7は、受け付けた操作者2の音声データをロボット用の音声データに変換し、ロボット用の音声データを伝送部18経由でロボット側音声出力装置14に提供する。
【0037】
画像リングバッファ9は、操作者側画像入力装置8から操作者2の画像データを受け付けるとともに、画像リングバッファ9は、操作者側音声入力装置5によって操作者2の音声データが入力状態か否か判断する。
【0038】
画像リングバッファ9は、操作者2の音声データが入力されていない状態の場合に、操作者側画像入力装置8から受け付けた操作者2の無発声状態の画像データを記憶する。例えば、画像リングバッファ9は、受け付けた操作者2の音声データのレベルが所定のしきい値以下の場合には、操作者2が無発声状態であると判断する。
【0039】
さらに、画像リングバッファ9は、腹話術モード制御部4においてロボット発声モードが設定されている場合、記憶されている操作者2の無発声状態の画像データを、画像スイッチ10、伝送部18経由で、ロボット側画像出力装置15に提供する。
【0040】
ここで、操作者の無発生状態の画像データは動画データでもよく、静止画データでもよい。
【0041】
画像スイッチ10は、腹話術モード制御部4においてロボット発声モードが設定されている場合、画像リングバッファ9から受け付けた操作者2の無発声状態の画像データを、伝送部18経由でロボット側画像出力装置15に提供する。
【0042】
一方、腹話術モード制御部4において操作者発声モードが設定されている場合、画像スイッチ10は、操作者側画像入力装置8から受け付けた操作者2の画像データを、伝送部18経由でロボット側画像出力装置15に提供する。
【0043】
操作者側画像出力装置11は、ロボット側画像入力装置16によって撮影されたロボット13又は観察者19周辺の画像データを伝送部18経由で受け付け、ロボット13又は観察者19周辺の画像データの内容を表示する。
【0044】
操作者側音出力装置12は、ロボット側音入力装置17からロボット13又は観察者19周辺の音データを伝送部18経由で受け付け、ロボット13又は観察者19周辺の音データを出力する。
【0045】
操作者側画像出力装置11と操作者側音出力装置12からの出力により、操作者2は観察者の反応を知ることができる。
【0046】
次に、ロボット13側の装置について説明する。
【0047】
ロボット13は、ロボットモーション操作インタフェース3から伝送部18経由で受け付けた操作データにしたがって動作する。
【0048】
ロボット側音声出力装置14は、腹話術モード制御部4においてロボット発声モードが設定されている場合、ボイスチェンジャー7によって得られたロボット用の音声データを、伝送部18経由で受け付け、ロボット用の音声データの内容を音声出力する。
【0049】
一方、ロボット側音声出力装置14は、腹話術モード制御部4において操作者発声モードが設定されている場合、操作者側音声入力装置5から、音声スイッチ6、伝送部18経由で、操作者2の音声データを受け付け、操作者2の音声データの内容を音声出力する。
【0050】
なお、ロボット側音声出力装置14においては、ロボット用の音声データを出力する部分と操作者2の音声データを出力する部分とを具備し、ロボット用の音声データを出力する部分はロボット13に内蔵されるとする。
【0051】
ロボット側画像出力装置15は、腹話術モード制御部4においてロボット発声モードが設定されている場合、画像リングバッファ9に記憶されている操作者2の無発声状態の画像データを、画像スイッチ10、伝送部18経由で受け付け、操作者2の無発声状態の画像データを表示する。
【0052】
一方、ロボット側画像出力装置15は、腹話術モード制御部4において操作者発声モードが設定されている場合、操作者側画像入力装置8によって入力された操作者2の画像データを、画像スイッチ10、伝送部18経由で受け付け、操作者2の画像データを表示する。
【0053】
ロボット側画像入力装置16は、ロボット13又は観察者19周辺の画像データを伝送部18経由で操作者側画像出力装置11に提供する。
【0054】
ロボット側音入力装置17は、ロボット13又は観察者19周辺の音データを伝送部18経由で操作者側音出力装置12に提供する。
【0055】
以上のような構成を持つ本実施の形態に係るキャラクター操作システム1は、操作者2自身の姿を、ロボット13近傍のロボット側画像出力装置15の画面上に表示する。操作者2は、ロボット13を操作しつつ、自分自身をロボット作業現場に登場させることができる。
【0056】
操作者2がロボット13として言葉を発する場合、無声状態の操作者の画像が観察者19に提供される。一方、操作者2が自分自身で言葉を発する場合、この言葉を発している操作者2の画像が観察者19に提供される。したがって、観察者19は、画面上の操作者2とロボット13とで腹話術がなされているように感じる。
【0057】
本実施の形態のように、ロボット13を遠隔操作する操作者2のリアリティと、ロボット13の人口的な面白み及び可愛らしさのそれぞれの特徴を生かし、操作者2とロボット13という2つのアイデンティティが同一の現場に現れることで、特殊な演出効果を生み出すことができる。
【0058】
このような腹話術型のキャラクター操作システム1を構築するために、本実施の形態では、操作者発声モードとロボット発声モードとの切り替えが行われる。
【0059】
ロボット発声モードが設定されている場合、操作者2の声がボイスチェンジャー7により変換され、変換後の声がロボット13の声としてロボット13側に出力される。ボイスチェンジャー7は、操作者2の声をロボット13のキャラクターにふさわしい声色に変化させる。
【0060】
操作者発声モードが設定されている場合、操作者2の声がそのままロボット13側に出力される。
【0061】
画像リングバッファ9には、操作者2が声を発していない状態の画像データが常に録画される。ロボット発声モードが設定されている場合、画像リングバッファ9に記憶されている最新の画像データが出力され、操作者2が声を発していない状態の画像がダミー画像として表示される。
【0062】
この結果、ロボット13の声が出力されている場合には、操作者2の唇の動きが観察者19に見えない。
【0063】
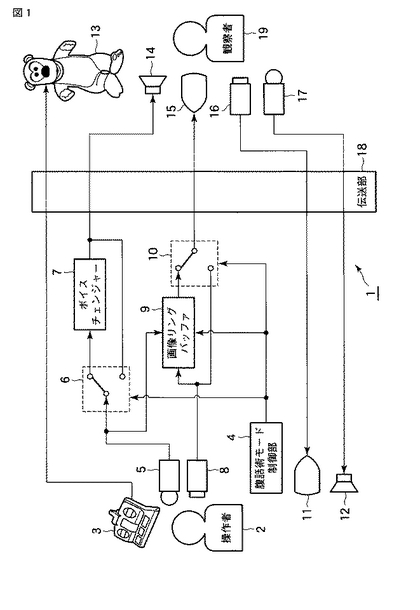
図2は、画像リングバッファ9の動作例を示すフローチャートである。
【0064】
ステップS1において、画像リングバッファ9は、操作者側音声入力装置5によって操作者2が発声状態か否か判断する。操作者2が発声状態の場合、画像リングバッファ9の更新は行われない。例えば、入力される操作者3の音声データのレベルが所定のしきい値以下の場合、無発生状態であると判断する。
【0065】
操作者2が発声状態でない場合、ステップS2において、画像リングバッファ9は、操作者側画像入力装置8から入力される操作者2の無発声状態の画像データを記憶する。
【0066】
ステップS3において、画像リングバッファ9は動作終了まで上記ステップS1以下の処理を繰り返す。
【0067】
図3は、本実施の形態に係るキャラクター操作システム1による腹話術型サービスの提供処理の例を示すフローチャートである。
【0068】
ステップT1において、画像リングバッファ9は、上記図2の処理により、操作者2が声を発していない無発声状態の画像データをダミー画像データとして記憶する。
【0069】
ステップT2において、腹話術モード制御部4は、操作者2に設定されたモードの種別を判断する。
【0070】
操作者2により操作者発声モードが設定された場合、ステップT3において、ロボット側音声出力装置14は、操作者2のオリジナルの音声データを出力し、ロボット側画像出力装置15は、操作者2のリアルの画像データを出力する。
【0071】
一方、操作者2によりロボット発声モードが設定された場合、ステップT4において、ロボット側音声出力装置14は、ボイスチェンジャー9によって変換された音声データを出力し、画像リングバッファ9に記憶されている操作者2の無発声状態の画像データ(ダミー画像データ)を出力する。
【0072】
ステップT5において、画像リングバッファ9は動作終了まで上記ステップT1以下の処理を繰り返す。
【0073】
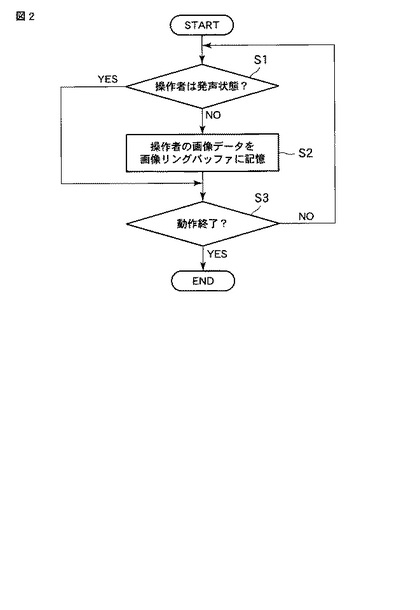
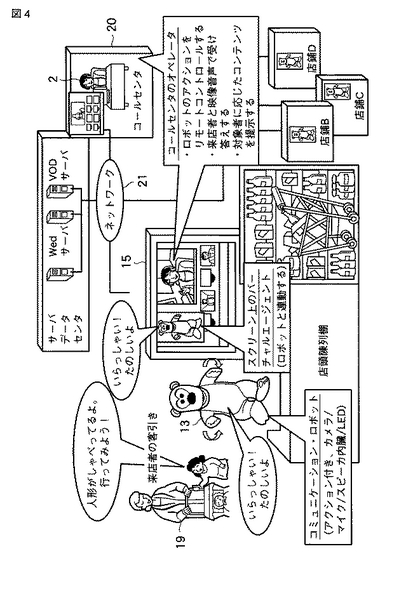
図4は、本実施の形態に係るキャラクター操作システム1の利用例を示す図である。
【0074】
ロボット13や観察者19の存在する現場と操作者2の存在するコールセンタ20とは、ネットワーク21で接続されている。操作者2は遠隔でロボット13を操作する。操作者2の画像はロボット側画像出力装置15から出力される。観察者19は、画面に表示されている操作者2とロボット13とのやり取りに興味を持つ。ロボット13は、キャラクター(バーチャルエージェント)として画面上に表示されていてもよい。操作者2は、観察者19の反応を確かめながら、腹話術型サービスを実施する。
【0075】
以上説明した本実施の形態では、観察者19に親しみを与える腹話術型のキャラクター操作システム1を実現できる。操作者2は、ロボット13を操作しつつ、簡単にロボット13を用いた腹話術を行うことができる。
【0076】
本実施の形態では、ロボット13と操作者2との語り合いから、操作者2の人格を観察者19に通知することができ、親しみを持ってもらうことができる。
【0077】
本実施の形態に係るキャラクター操作システム1は、例えば宣伝広告に用いることができる。
【0078】
なお、本実施の形態において、各構成要素は同様の動作を実現可能であれば配置を変更させてもよく、また各構成要素を自由に組み合わせてもよく、各構成要素を自由に分割してもよく、いくつかの構成要素を削除してもよい。すなわち、本実施の形態については、上記の構成そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。
【0079】
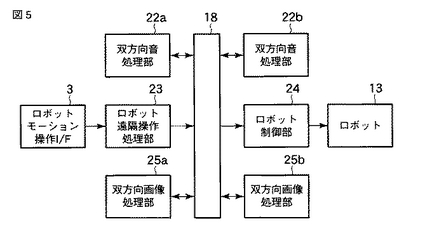
例えば、図5に示すように、操作者2側とロボット13側との間の音データ又は音声データの伝送などのような音データ又は音声データに関する処理は、操作者2側の双方向音処理部22a及びロボット13側の双方向音処理部22bによって実行されるとしてもよい。
【0080】
また、ロボットモーション操作インタフェース3からの操作データは、操作者2側のロボット遠隔操作処理部23によって処理され、ロボット13側のロボット制御部24がロボット遠隔操作処理部23から受け付けた操作データに基づいて、ロボット13を制御するとしてもよい。
【0081】
また、操作者2側とロボット13側との間の画像データの伝送などのような画像データに関する処理は、操作者2側の双方向画像処理部25a及びロボット13側の双方向画像処理部25bによって実行されるとしてもよい。
【0082】
ここで、本実施の形態に係るキャラクター操作システム1の構成要素のうち、腹話術モード制御部4、音声スイッチ6、画像リングバッファ9、画像スイッチ10を、コンピュータとソフトウェアとを用いて実現する場合について説明する。
【0083】
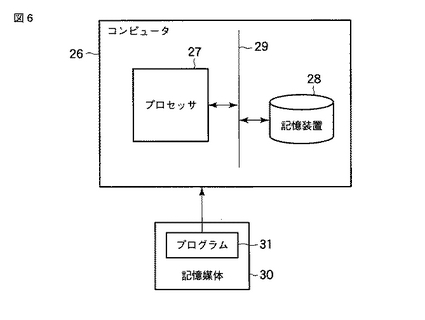
図6は、本実施の形態に係る腹話術モード制御部4、音声スイッチ6、画像リングバッファ9、画像スイッチ10を、コンピュータとソフトウェアとを用いて実現するための構成の例を示すブロック図である。
【0084】
コンピュータ26は、プロセッサ27、例えば内部メモリなどの記憶装置28、内部バス29を具備する。プロセッサ27と記憶装置28とは、内部バス29経由で接続されている。
【0085】
記憶媒体30に記憶されているプログラム31は、コンピュータ26に読み込まれ、プロセッサ27により実行される。これにより、コンピュータ26は、上記腹話術モード制御部4、音声スイッチ6、画像リングバッファ9、画像スイッチ10としての機能を実現する。記憶装置28は、例えば画像リングバッファ9として機能する。
【0086】
本実施の形態において、プログラム31は、例えば磁気ディスク(フレキシブルディスク、ハードディスク等)、光ディスク(CD−ROM、DVD等)、半導体メモリなどの記憶媒体30に書き込んで、腹話術モード制御部4、音声スイッチ6、画像リングバッファ9、画像スイッチ10として動作するコンピュータ26に適用可能である。また、上記プログラム31は、通信媒体により伝送してコンピュータ26に適用することも可能である。コンピュータ26は、上記プログラム31を読み込み、このプログラム31によって動作が制御されることにより、腹話術モード制御部4、音声スイッチ6、画像リングバッファ9、画像スイッチ10としての機能を実現する。プログラム31は、複数のコンピュータに分散して配置され、複数のコンピュータ間で互いに連携しつつ処理が実行されるとしてもよい。
【産業上の利用可能性】
【0087】
本発明は、例えばロボットなどのキャラクターの遠隔操作分野に有効である。
【図面の簡単な説明】
【0088】
【図1】本発明の実施の形態に係るキャラクター操作システムの構成の例を示すブロック図。
【図2】画像リングバッファの動作例を示すフローチャート。
【図3】同実施の形態に係るキャラクター操作システムによる腹話術型サービスの提供処理の例を示すフローチャート。
【図4】同実施の形態に係るキャラクター操作システムの利用例を示す図。
【図5】同実施の形態に係るキャラクター操作システムの変形例を示すブロック図。
【図6】同実施の形態に係る音声スイッチ、画像スイッチ、画像リングバッファ、腹話術モード制御部を、コンピュータとソフトウェアとを用いて実現するための構成の例を示すブロック図。
【符号の説明】
【0089】
1…キャラクター操作システム、2…操作者、3…ロボットモーション操作インタフェース、4…腹話術モード制御部、5…操作者側音声入力装置、6…音声スイッチ、7…ボイスチェンジャー、8…操作者側画像入力装置、9…画像リングバッファ、10…画像スイッチ、11…操作者側画像出力装置、12…操作者側音出力装置、13…ロボット、14…ロボット側音声出力装置、15…ロボット側画像出力装置、16…ロボット側画像入力装置、17…ロボット側音入力装置、18…伝送部、19…観察者、20…コールセンタ、21…ネットワーク、26…コンピュータ、27…プロセッサ、28…記憶装置、29…内部バス、30…記憶媒体、31…プログラム
【技術分野】
【0001】
本発明は、例えばロボットなどのキャラクターを操作者が操作するキャラクター操作システム及びプログラム並びに方法に関する。
【背景技術】
【0002】
ロボット作業現場に存在するロボットを、操作者が遠隔操作する技術が広く用いられている。
【0003】
また、操作者自身の顔画像を操作者の分身(アバタ)としてロボットの顔部分に表示する技術が検討されている(非特許文献1参照)。
【非特許文献1】Susumu Tachi, “Telexistence and Retro-reflective Projection Technology (RPT)”, Proceedings of the 5th Virtual Reality International Conference (VRIC2003), 2003年5月, pp.69/1-69/9
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の非特許文献1において、操作者の現実の顔画像とロボットの機械的なボディとを調和した状態で組み合わせることは困難であり、ロボットの観察者が操作者の顔画像とロボットのボディとのギャップから違和感を持つ場合がある。
【0005】
したがって、操作者自身の顔画像をロボットの顔部分に表示した場合においては、ロボットの観察者に、親しみを持たせることが困難である。
【0006】
本発明は、以上のような実情に鑑みてなされたもので、観察者に親しみを与える腹話術型のキャラクター操作システム及びプログラム並びに方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の第1の態様に係るキャラクター操作システムは、キャラクターを操作する操作者による発声を行う操作者発声モードかキャラクターによる発声を行うキャラクター発声モードかの設定を受け付けるモード制御手段と、操作者の音声データを入力する操作者側音声入力手段と、操作者の画像データを入力する操作者側画像入力手段と、操作者の音声データが入力されているか否か判断し、操作者の音声データが入力されていないと判断された場合に、操作者側画像入力手段によって入力された操作者の画像データを操作者の無発声状態の画像データとして記憶する記憶手段と、キャラクター発声モードが設定されている場合に、操作者の無発声状態の画像データをキャラクター側に出力し、操作者発声モードが設定されている場合に、操作者側画像入力手段によって入力された操作者の画像データをキャラクター側に出力するキャラクター側画像出力手段と、操作者側音声入力手段によって入力された操作者の音声データを、キャラクター側に出力するキャラクター側音声出力手段とを具備する。
【0008】
これにより、キャラクターが発声している場合に操作者の画像は無発声の状態とすることができ、腹話術型のキャラクター操作を行うことができる。
【0009】
上記キャラクター操作システムにおいて、キャラクター発声モードが設定されている場合に、記憶手段に記憶されている操作者の無発声状態の画像データをキャラクター側画像出力手段に提供し、操作者発声モードが設定されている場合に、操作者側画像入力手段によって入力された操作者の画像データをキャラクター側画像出力手段に提供する画像スイッチをさらに具備するとしてもよい。
【0010】
上記キャラクター操作システムにおいて、キャラクター発声モードが設定されている場合に、操作者の音声データをキャラクター用の音声データに変換する音声変換手段をさらに具備し、キャラクター側音声出力手段は、キャラクター発声モードが設定されている場合に、キャラクター用の音声データをキャラクター側に出力し、操作者発声モードが設定されている場合に、操作者側音声入力手段によって入力された操作者の音声データをキャラクター側に出力するとしてもよい。
【0011】
これにより、キャラクターにあった声により腹話術型のキャラクター操作を行うことができる。
【0012】
このキャラクター操作システムにおいて、キャラクター発声モードが設定されている場合に、操作者側音声入力手段によって入力された操作者の音声データを音声変換手段に提供し、操作者発声モードが設定されている場合に、操作者側音声入力手段によって入力された操作者の音声データをキャラクター側音声出力手段に提供する音声スイッチをさらに具備するとしてもよい。
【0013】
上記キャラクター操作システムにおいて、キャラクター側の状態を撮影した画像データを操作者側に出力する操作者側画像出力手段と、キャラクター側の音の状態を測定した音データを操作者側に出力する操作者側音出力手段とをさらに具備するとしてもよい。
【0014】
これにより、操作者はキャラクター側の反応を観察しつつ、腹話術型のキャラクター操作を行うことができる。
【0015】
本発明の第2の態様に係るキャラクター操作装置は、キャラクターを操作する操作者側に備えられる操作者側音声入力装置及び操作者側画像入力装置と、キャラクター側に備えられるキャラクター側画像出力装置及びキャラクター側音声出力装置とに接続され、操作者による発声を行う操作者発声モードかキャラクターによる発声を行うキャラクター発声モードかの設定を受け付けるモード制御手段と、操作者側音声入力装置によって操作者の音声データが入力されているか否か判断し、操作者の音声データが入力されていないと判断された場合に、操作者側画像入力装置によって入力された操作者の画像データを操作者の無発声状態の画像データとして記憶する記憶手段と、キャラクター発声モードが設定されている場合に、記憶手段に記憶されている操作者の無発声状態の画像データをキャラクター側画像出力装置に提供し、操作者発声モードが設定されている場合に、操作者側画像入力装置によって入力された操作者の画像データをキャラクター側画像出力装置に提供する画像スイッチと、操作者側音声入力装置によって入力された操作者の音声データを、キャラクター側音声出力装置に提供する提供手段とを具備する。
【0016】
これにより、キャラクターが発声している場合に操作者の画像は無発声の状態とすることができ、腹話術型のキャラクター操作を行うことができる。
【0017】
上記キャラクター操作装置において、キャラクター発声モードが設定されている場合に、操作者の音声データをキャラクター用の音声データに変換する音声変換手段をさらに具備し、提供手段は、キャラクター発声モードが設定されている場合に、操作者側音声入力装置によって入力された前記操作者の音声データを音声変換手段経由でキャラクター側音声出力装置に提供し、操作者発声モードが設定されている場合に、操作者側音声入力装置によって入力された操作者の音声データをキャラクター側音声出力装置に提供する音声スイッチであり、キャラクター側音声出力装置は、キャラクター発声モードが設定されている場合に、キャラクター用の音声データをキャラクター側に出力し、操作者発声モードが設定されている場合に、操作者側音声入力装置によって入力された操作者の音声データをキャラクター側に出力するとしてもよい。
【0018】
これにより、キャラクターにあった声により腹話術型のキャラクター操作を行うことができる。
【0019】
なお、上記の態様はシステム又は装置として表現されている。しかしながら、これに限らず、上記の態様は、方法、プログラム、コンピュータ読み取り可能な記憶媒体などで表現されるとしてもよい。
【発明の効果】
【0020】
本発明により、観察者に親しみを与える腹話術型のキャラクター操作システム及びプログラム並びに方法を提供することができる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照しながら本発明の実施の形態について説明する。なお、以下の各図において同一の部分については同一の符号を付して説明を省略する。
【0022】
本実施の形態では、操作者とキャラクターとで簡単に腹話術を行うことができるキャラ
クター操作システムについて説明する。
【0023】
なお、以下においては、キャラクターがロボットの場合を例に説明する。しかしながら、このキャラクターは、例えばコンピュータ画面に表示されるバーチャルのキャラクター(例えば動物、人間、仮想的生物、創作された生物)でもよい。
【0024】
図1は、本実施の形態に係るキャラクター操作システムの構成の例を示すブロック図である。
【0025】
本実施の形態に係るキャラクター操作システム1は、操作者2側の装置として、ロボットモーション操作インタフェース3、腹話術モード制御部4、操作者側音声入力装置(例えばマイク)5、音声スイッチ6、ボイスチェンジャー7、操作者側画像入力装置(例えばカメラ)8、画像リングバッファ(無声画像記憶部)9、画像スイッチ10、操作者側画像出力装置(例えばディスプレイ)11、操作者側音出力装置(例えばスピーカ)12を具備する。
【0026】
また、キャラクター操作システム1は、ロボット13側の装置として、ロボット側音声出力装置14、ロボット側画像出力装置15、ロボット側画像入力装置16、ロボット側音入力装置17を具備する。なお、このロボット13側の各種装置のうち少なくとも一つは、ロボット13に内蔵されていてもよい。特に、ロボット側音声出力装置14のうちロボット13としての声を出力する部分については、ロボット13に内蔵されていることが望ましい。
【0027】
また、キャラクター操作システム1は、操作者2側の装置とロボット13側の装置との間でデータを送受信可能とする伝送部18を具備する。
【0028】
まず、操作者2側の装置について説明する。
【0029】
ロボットモーション操作インタフェース3は、操作者2によるロボット13の操作指令を受け付け、この指令内容を示す操作データを伝送部18経由でロボット13に送信する。
【0030】
腹話術モード制御部4は、操作者2からロボット発声モードか操作者発声モードかを指定するモード指定を受け付け、このモードの設定(選択)にしたがって、音声スイッチ6、画像スイッチ10を切り換えるとともに、画像リングバッファ9に記憶されている画像データの出力状態を制御する。
【0031】
ここで、ロボット発声モードは、ロボット13側において、操作者2の音声をロボット13の音声として出力する場合に選択される。一方、操作者発声モードは、ロボット13側において、操作者2の音声をそのまま操作者2の音声として出力する場合に選択される。
【0032】
音声スイッチ6は、操作者側音声入力装置5から操作者2の音声データを受け付ける。
【0033】
そして、音声スイッチ6は、腹話術モード制御部4においてロボット発声モードが設定されている場合、操作者2の音声データをボイスチェンジャー7に提供する。
【0034】
一方、音声スイッチ6は、腹話術モード制御部4において操作者発声モードが設定されている場合、操作者2の音声データを伝送部18経由でロボット側音声出力装置14に提供する。
【0035】
ボイスチェンジャー7は、腹話術モード制御部4においてロボット発声モードが設定されている場合に、操作者側音声入力装置5から音声スイッチ6経由で操作者2の音声データを受け付ける。
【0036】
そして、ボイスチェンジャー7は、受け付けた操作者2の音声データをロボット用の音声データに変換し、ロボット用の音声データを伝送部18経由でロボット側音声出力装置14に提供する。
【0037】
画像リングバッファ9は、操作者側画像入力装置8から操作者2の画像データを受け付けるとともに、画像リングバッファ9は、操作者側音声入力装置5によって操作者2の音声データが入力状態か否か判断する。
【0038】
画像リングバッファ9は、操作者2の音声データが入力されていない状態の場合に、操作者側画像入力装置8から受け付けた操作者2の無発声状態の画像データを記憶する。例えば、画像リングバッファ9は、受け付けた操作者2の音声データのレベルが所定のしきい値以下の場合には、操作者2が無発声状態であると判断する。
【0039】
さらに、画像リングバッファ9は、腹話術モード制御部4においてロボット発声モードが設定されている場合、記憶されている操作者2の無発声状態の画像データを、画像スイッチ10、伝送部18経由で、ロボット側画像出力装置15に提供する。
【0040】
ここで、操作者の無発生状態の画像データは動画データでもよく、静止画データでもよい。
【0041】
画像スイッチ10は、腹話術モード制御部4においてロボット発声モードが設定されている場合、画像リングバッファ9から受け付けた操作者2の無発声状態の画像データを、伝送部18経由でロボット側画像出力装置15に提供する。
【0042】
一方、腹話術モード制御部4において操作者発声モードが設定されている場合、画像スイッチ10は、操作者側画像入力装置8から受け付けた操作者2の画像データを、伝送部18経由でロボット側画像出力装置15に提供する。
【0043】
操作者側画像出力装置11は、ロボット側画像入力装置16によって撮影されたロボット13又は観察者19周辺の画像データを伝送部18経由で受け付け、ロボット13又は観察者19周辺の画像データの内容を表示する。
【0044】
操作者側音出力装置12は、ロボット側音入力装置17からロボット13又は観察者19周辺の音データを伝送部18経由で受け付け、ロボット13又は観察者19周辺の音データを出力する。
【0045】
操作者側画像出力装置11と操作者側音出力装置12からの出力により、操作者2は観察者の反応を知ることができる。
【0046】
次に、ロボット13側の装置について説明する。
【0047】
ロボット13は、ロボットモーション操作インタフェース3から伝送部18経由で受け付けた操作データにしたがって動作する。
【0048】
ロボット側音声出力装置14は、腹話術モード制御部4においてロボット発声モードが設定されている場合、ボイスチェンジャー7によって得られたロボット用の音声データを、伝送部18経由で受け付け、ロボット用の音声データの内容を音声出力する。
【0049】
一方、ロボット側音声出力装置14は、腹話術モード制御部4において操作者発声モードが設定されている場合、操作者側音声入力装置5から、音声スイッチ6、伝送部18経由で、操作者2の音声データを受け付け、操作者2の音声データの内容を音声出力する。
【0050】
なお、ロボット側音声出力装置14においては、ロボット用の音声データを出力する部分と操作者2の音声データを出力する部分とを具備し、ロボット用の音声データを出力する部分はロボット13に内蔵されるとする。
【0051】
ロボット側画像出力装置15は、腹話術モード制御部4においてロボット発声モードが設定されている場合、画像リングバッファ9に記憶されている操作者2の無発声状態の画像データを、画像スイッチ10、伝送部18経由で受け付け、操作者2の無発声状態の画像データを表示する。
【0052】
一方、ロボット側画像出力装置15は、腹話術モード制御部4において操作者発声モードが設定されている場合、操作者側画像入力装置8によって入力された操作者2の画像データを、画像スイッチ10、伝送部18経由で受け付け、操作者2の画像データを表示する。
【0053】
ロボット側画像入力装置16は、ロボット13又は観察者19周辺の画像データを伝送部18経由で操作者側画像出力装置11に提供する。
【0054】
ロボット側音入力装置17は、ロボット13又は観察者19周辺の音データを伝送部18経由で操作者側音出力装置12に提供する。
【0055】
以上のような構成を持つ本実施の形態に係るキャラクター操作システム1は、操作者2自身の姿を、ロボット13近傍のロボット側画像出力装置15の画面上に表示する。操作者2は、ロボット13を操作しつつ、自分自身をロボット作業現場に登場させることができる。
【0056】
操作者2がロボット13として言葉を発する場合、無声状態の操作者の画像が観察者19に提供される。一方、操作者2が自分自身で言葉を発する場合、この言葉を発している操作者2の画像が観察者19に提供される。したがって、観察者19は、画面上の操作者2とロボット13とで腹話術がなされているように感じる。
【0057】
本実施の形態のように、ロボット13を遠隔操作する操作者2のリアリティと、ロボット13の人口的な面白み及び可愛らしさのそれぞれの特徴を生かし、操作者2とロボット13という2つのアイデンティティが同一の現場に現れることで、特殊な演出効果を生み出すことができる。
【0058】
このような腹話術型のキャラクター操作システム1を構築するために、本実施の形態では、操作者発声モードとロボット発声モードとの切り替えが行われる。
【0059】
ロボット発声モードが設定されている場合、操作者2の声がボイスチェンジャー7により変換され、変換後の声がロボット13の声としてロボット13側に出力される。ボイスチェンジャー7は、操作者2の声をロボット13のキャラクターにふさわしい声色に変化させる。
【0060】
操作者発声モードが設定されている場合、操作者2の声がそのままロボット13側に出力される。
【0061】
画像リングバッファ9には、操作者2が声を発していない状態の画像データが常に録画される。ロボット発声モードが設定されている場合、画像リングバッファ9に記憶されている最新の画像データが出力され、操作者2が声を発していない状態の画像がダミー画像として表示される。
【0062】
この結果、ロボット13の声が出力されている場合には、操作者2の唇の動きが観察者19に見えない。
【0063】
図2は、画像リングバッファ9の動作例を示すフローチャートである。
【0064】
ステップS1において、画像リングバッファ9は、操作者側音声入力装置5によって操作者2が発声状態か否か判断する。操作者2が発声状態の場合、画像リングバッファ9の更新は行われない。例えば、入力される操作者3の音声データのレベルが所定のしきい値以下の場合、無発生状態であると判断する。
【0065】
操作者2が発声状態でない場合、ステップS2において、画像リングバッファ9は、操作者側画像入力装置8から入力される操作者2の無発声状態の画像データを記憶する。
【0066】
ステップS3において、画像リングバッファ9は動作終了まで上記ステップS1以下の処理を繰り返す。
【0067】
図3は、本実施の形態に係るキャラクター操作システム1による腹話術型サービスの提供処理の例を示すフローチャートである。
【0068】
ステップT1において、画像リングバッファ9は、上記図2の処理により、操作者2が声を発していない無発声状態の画像データをダミー画像データとして記憶する。
【0069】
ステップT2において、腹話術モード制御部4は、操作者2に設定されたモードの種別を判断する。
【0070】
操作者2により操作者発声モードが設定された場合、ステップT3において、ロボット側音声出力装置14は、操作者2のオリジナルの音声データを出力し、ロボット側画像出力装置15は、操作者2のリアルの画像データを出力する。
【0071】
一方、操作者2によりロボット発声モードが設定された場合、ステップT4において、ロボット側音声出力装置14は、ボイスチェンジャー9によって変換された音声データを出力し、画像リングバッファ9に記憶されている操作者2の無発声状態の画像データ(ダミー画像データ)を出力する。
【0072】
ステップT5において、画像リングバッファ9は動作終了まで上記ステップT1以下の処理を繰り返す。
【0073】
図4は、本実施の形態に係るキャラクター操作システム1の利用例を示す図である。
【0074】
ロボット13や観察者19の存在する現場と操作者2の存在するコールセンタ20とは、ネットワーク21で接続されている。操作者2は遠隔でロボット13を操作する。操作者2の画像はロボット側画像出力装置15から出力される。観察者19は、画面に表示されている操作者2とロボット13とのやり取りに興味を持つ。ロボット13は、キャラクター(バーチャルエージェント)として画面上に表示されていてもよい。操作者2は、観察者19の反応を確かめながら、腹話術型サービスを実施する。
【0075】
以上説明した本実施の形態では、観察者19に親しみを与える腹話術型のキャラクター操作システム1を実現できる。操作者2は、ロボット13を操作しつつ、簡単にロボット13を用いた腹話術を行うことができる。
【0076】
本実施の形態では、ロボット13と操作者2との語り合いから、操作者2の人格を観察者19に通知することができ、親しみを持ってもらうことができる。
【0077】
本実施の形態に係るキャラクター操作システム1は、例えば宣伝広告に用いることができる。
【0078】
なお、本実施の形態において、各構成要素は同様の動作を実現可能であれば配置を変更させてもよく、また各構成要素を自由に組み合わせてもよく、各構成要素を自由に分割してもよく、いくつかの構成要素を削除してもよい。すなわち、本実施の形態については、上記の構成そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。
【0079】
例えば、図5に示すように、操作者2側とロボット13側との間の音データ又は音声データの伝送などのような音データ又は音声データに関する処理は、操作者2側の双方向音処理部22a及びロボット13側の双方向音処理部22bによって実行されるとしてもよい。
【0080】
また、ロボットモーション操作インタフェース3からの操作データは、操作者2側のロボット遠隔操作処理部23によって処理され、ロボット13側のロボット制御部24がロボット遠隔操作処理部23から受け付けた操作データに基づいて、ロボット13を制御するとしてもよい。
【0081】
また、操作者2側とロボット13側との間の画像データの伝送などのような画像データに関する処理は、操作者2側の双方向画像処理部25a及びロボット13側の双方向画像処理部25bによって実行されるとしてもよい。
【0082】
ここで、本実施の形態に係るキャラクター操作システム1の構成要素のうち、腹話術モード制御部4、音声スイッチ6、画像リングバッファ9、画像スイッチ10を、コンピュータとソフトウェアとを用いて実現する場合について説明する。
【0083】
図6は、本実施の形態に係る腹話術モード制御部4、音声スイッチ6、画像リングバッファ9、画像スイッチ10を、コンピュータとソフトウェアとを用いて実現するための構成の例を示すブロック図である。
【0084】
コンピュータ26は、プロセッサ27、例えば内部メモリなどの記憶装置28、内部バス29を具備する。プロセッサ27と記憶装置28とは、内部バス29経由で接続されている。
【0085】
記憶媒体30に記憶されているプログラム31は、コンピュータ26に読み込まれ、プロセッサ27により実行される。これにより、コンピュータ26は、上記腹話術モード制御部4、音声スイッチ6、画像リングバッファ9、画像スイッチ10としての機能を実現する。記憶装置28は、例えば画像リングバッファ9として機能する。
【0086】
本実施の形態において、プログラム31は、例えば磁気ディスク(フレキシブルディスク、ハードディスク等)、光ディスク(CD−ROM、DVD等)、半導体メモリなどの記憶媒体30に書き込んで、腹話術モード制御部4、音声スイッチ6、画像リングバッファ9、画像スイッチ10として動作するコンピュータ26に適用可能である。また、上記プログラム31は、通信媒体により伝送してコンピュータ26に適用することも可能である。コンピュータ26は、上記プログラム31を読み込み、このプログラム31によって動作が制御されることにより、腹話術モード制御部4、音声スイッチ6、画像リングバッファ9、画像スイッチ10としての機能を実現する。プログラム31は、複数のコンピュータに分散して配置され、複数のコンピュータ間で互いに連携しつつ処理が実行されるとしてもよい。
【産業上の利用可能性】
【0087】
本発明は、例えばロボットなどのキャラクターの遠隔操作分野に有効である。
【図面の簡単な説明】
【0088】
【図1】本発明の実施の形態に係るキャラクター操作システムの構成の例を示すブロック図。
【図2】画像リングバッファの動作例を示すフローチャート。
【図3】同実施の形態に係るキャラクター操作システムによる腹話術型サービスの提供処理の例を示すフローチャート。
【図4】同実施の形態に係るキャラクター操作システムの利用例を示す図。
【図5】同実施の形態に係るキャラクター操作システムの変形例を示すブロック図。
【図6】同実施の形態に係る音声スイッチ、画像スイッチ、画像リングバッファ、腹話術モード制御部を、コンピュータとソフトウェアとを用いて実現するための構成の例を示すブロック図。
【符号の説明】
【0089】
1…キャラクター操作システム、2…操作者、3…ロボットモーション操作インタフェース、4…腹話術モード制御部、5…操作者側音声入力装置、6…音声スイッチ、7…ボイスチェンジャー、8…操作者側画像入力装置、9…画像リングバッファ、10…画像スイッチ、11…操作者側画像出力装置、12…操作者側音出力装置、13…ロボット、14…ロボット側音声出力装置、15…ロボット側画像出力装置、16…ロボット側画像入力装置、17…ロボット側音入力装置、18…伝送部、19…観察者、20…コールセンタ、21…ネットワーク、26…コンピュータ、27…プロセッサ、28…記憶装置、29…内部バス、30…記憶媒体、31…プログラム
【特許請求の範囲】
【請求項1】
操作者がキャラクターを操作するキャラクター操作システムにおいて、
前記操作者による発声を行う操作者発声モードか前記キャラクターによる発声を行うキャラクター発声モードかの設定を受け付けるモード制御手段と、
前記操作者の音声データを入力する操作者側音声入力手段と、
前記操作者の画像データを入力する操作者側画像入力手段と、
前記操作者の音声データが入力されているか否か判断し、前記操作者の音声データが入力されていないと判断された場合に、前記操作者側画像入力手段によって入力された前記操作者の画像データを前記操作者の無発声状態の画像データとして記憶する記憶手段と、
前記キャラクター発声モードが設定されている場合に、前記操作者の無発声状態の画像データを前記キャラクター側に出力し、前記操作者発声モードが設定されている場合に、前記操作者側画像入力手段によって入力された前記操作者の画像データを前記キャラクター側に出力するキャラクター側画像出力手段と、
前記操作者側音声入力手段によって入力された前記操作者の音声データを、前記キャラクター側に出力するキャラクター側音声出力手段と
を具備することを特徴とするキャラクター操作システム。
【請求項2】
請求項1記載のキャラクター操作システムにおいて、
前記キャラクター発声モードが設定されている場合に、前記記憶手段に記憶されている前記操作者の無発声状態の画像データを前記キャラクター側画像出力手段に提供し、前記操作者発声モードが設定されている場合に、前記操作者側画像入力手段によって入力された前記操作者の画像データを前記キャラクター側画像出力手段に提供する画像スイッチをさらに具備することを特徴とするキャラクター操作システム。
【請求項3】
請求項1又は請求項2記載のキャラクター操作システムにおいて、
前記キャラクター発声モードが設定されている場合に、前記操作者の音声データをキャラクター用の音声データに変換する音声変換手段をさらに具備し、
前記キャラクター側音声出力手段は、前記キャラクター発声モードが設定されている場合に、前記キャラクター用の音声データを前記キャラクター側に出力し、前記操作者発声モードが設定されている場合に、前記操作者側音声入力手段によって入力された前記操作者の音声データを前記キャラクター側に出力する
ことを特徴とするキャラクター操作システム。
【請求項4】
請求項3記載のキャラクター操作システムにおいて、
前記キャラクター発声モードが設定されている場合に、前記操作者側音声入力手段によって入力された前記操作者の音声データを前記音声変換手段に提供し、前記操作者発声モードが設定されている場合に、前記操作者側音声入力手段によって入力された前記操作者の音声データを前記キャラクター側音声出力手段に提供する音声スイッチをさらに具備することを特徴とするキャラクター操作システム。
【請求項5】
請求項1乃至請求項4のいずれか1項に記載のキャラクター操作システムにおいて、
前記キャラクター側の状態を撮影した画像データを前記操作者側に出力する操作者側画像出力手段と、
前記キャラクター側の音の状態を測定した音データを前記操作者側に出力する操作者側音出力手段と
をさらに具備することを特徴とするキャラクター操作システム。
【請求項6】
キャラクターを操作する操作者側に備えられる操作者側音声入力装置及び操作者側画像入力装置と、前記キャラクター側に備えられるキャラクター側画像出力装置及びキャラクター側音声出力装置とに接続されるキャラクター操作装置において、
前記操作者による発声を行う操作者発声モードか前記キャラクターによる発声を行うキャラクター発声モードかの設定を受け付けるモード制御手段と、
前記操作者側音声入力装置によって前記操作者の音声データが入力されているか否か判断し、前記操作者の音声データが入力されていないと判断された場合に、前記操作者側画像入力装置によって入力された前記操作者の画像データを前記操作者の無発声状態の画像データとして記憶する記憶手段と、
前記キャラクター発声モードが設定されている場合に、前記記憶手段に記憶されている前記操作者の無発声状態の画像データを前記キャラクター側画像出力装置に提供し、前記操作者発声モードが設定されている場合に、前記操作者側画像入力装置によって入力された前記操作者の画像データを前記キャラクター側画像出力装置に提供する画像スイッチと、
前記操作者側音声入力装置によって入力された前記操作者の音声データを、前記キャラクター側音声出力装置に提供する提供手段と
を具備することを特徴とするキャラクター操作装置。
【請求項7】
請求項6記載のキャラクター操作装置において、
前記キャラクター発声モードが設定されている場合に、前記操作者の音声データをキャラクター用の音声データに変換する音声変換手段をさらに具備し、
前記提供手段は、前記キャラクター発声モードが設定されている場合に、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記音声変換手段経由で前記キャラクター側音声出力装置に提供し、前記操作者発声モードが設定されている場合に、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記キャラクター側音声出力装置に提供する音声スイッチであり、
前記キャラクター側音声出力装置は、前記キャラクター発声モードが設定されている場合に、前記キャラクター用の音声データを前記キャラクター側に出力し、前記操作者発声モードが設定されている場合に、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記キャラクター側に出力する
ことを特徴とするキャラクター操作装置。
【請求項8】
キャラクターを操作する操作者側に備えられる操作者側音声入力装置及び操作者側画像入力装置と、前記キャラクター側に備えられるキャラクター側画像出力装置及びキャラクター側音声出力装置とに接続されるコンピュータを、
前記操作者による発声を行う操作者発声モードか前記キャラクターによる発声を行うキャラクター発声モードかの設定を受け付けるモード制御手段、
前記操作者側音声入力装置によって前記操作者の音声データが入力されているか否か判断し、前記操作者の音声データが入力されていないと判断された場合に、前記操作者側画像入力装置によって入力された前記操作者の画像データを前記操作者の無発声状態の画像データとして記憶する記憶手段、
前記キャラクター発声モードが設定されている場合に、前記記憶手段に記憶されている前記操作者の無発声状態の画像データを前記キャラクター側画像出力装置に提供し、前記操作者発声モードが設定されている場合に、前記操作者側画像入力装置によって入力された前記操作者の画像データを前記キャラクター側画像出力装置に提供する画像スイッチ、
前記操作者側音声入力装置によって入力された前記操作者の音声データを、前記キャラクター側音声出力装置に提供する提供手段
として機能させるためのプログラム。
【請求項9】
請求項8記載のプログラムにおいて、
前記コンピュータを、前記キャラクター発声モードが設定されている場合に、前記操作者の音声データをキャラクター用の音声データに変換する音声変換手段として機能させ、
前記提供手段は、前記キャラクター発声モードが設定されている場合に、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記音声変換手段経由で前記キャラクター側音声出力装置に提供し、前記操作者発声モードが設定されている場合に、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記キャラクター側音声出力装置に提供する音声スイッチとして機能し、
前記キャラクター側音声出力装置は、前記キャラクター発声モードが設定されている場合に、前記キャラクター用の音声データを前記キャラクター側に出力し、前記操作者発声モードが設定されている場合に、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記キャラクター側に出力する
ことを特徴とするプログラム。
【請求項10】
キャラクターを操作する操作者側に備えられる操作者側音声入力装置及び操作者側画像入力装置と、前記キャラクター側に備えられるキャラクター側画像出力装置及びキャラクター側音声出力装置とを具備するシステムによるキャラクター操作方法において、
前記操作者側音声入力装置によって前記操作者の音声データが入力されているか否か判断し、前記操作者の音声データが入力されていないと判断された場合に、前記操作者側画像入力装置によって入力された前記操作者の画像データを前記操作者の無発声状態の画像データとして記憶し、
前記操作者による発声を行う操作者発声モードが設定されているか前記キャラクターによる発声を行うキャラクター発声モードが設定されているかを判断し、
前記キャラクター発声モードが設定されている場合に、前記記憶手段に記憶されている前記操作者の無発声状態の画像データを前記キャラクター側画像出力装置に提供し、前記操作者発声モードが設定されている場合に、前記操作者側画像入力装置によって入力された前記操作者の画像データを前記キャラクター側画像出力装置に提供するとともに、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記キャラクター側音声出力装置に提供する
ことを特徴とするキャラクター操作方法。
【請求項1】
操作者がキャラクターを操作するキャラクター操作システムにおいて、
前記操作者による発声を行う操作者発声モードか前記キャラクターによる発声を行うキャラクター発声モードかの設定を受け付けるモード制御手段と、
前記操作者の音声データを入力する操作者側音声入力手段と、
前記操作者の画像データを入力する操作者側画像入力手段と、
前記操作者の音声データが入力されているか否か判断し、前記操作者の音声データが入力されていないと判断された場合に、前記操作者側画像入力手段によって入力された前記操作者の画像データを前記操作者の無発声状態の画像データとして記憶する記憶手段と、
前記キャラクター発声モードが設定されている場合に、前記操作者の無発声状態の画像データを前記キャラクター側に出力し、前記操作者発声モードが設定されている場合に、前記操作者側画像入力手段によって入力された前記操作者の画像データを前記キャラクター側に出力するキャラクター側画像出力手段と、
前記操作者側音声入力手段によって入力された前記操作者の音声データを、前記キャラクター側に出力するキャラクター側音声出力手段と
を具備することを特徴とするキャラクター操作システム。
【請求項2】
請求項1記載のキャラクター操作システムにおいて、
前記キャラクター発声モードが設定されている場合に、前記記憶手段に記憶されている前記操作者の無発声状態の画像データを前記キャラクター側画像出力手段に提供し、前記操作者発声モードが設定されている場合に、前記操作者側画像入力手段によって入力された前記操作者の画像データを前記キャラクター側画像出力手段に提供する画像スイッチをさらに具備することを特徴とするキャラクター操作システム。
【請求項3】
請求項1又は請求項2記載のキャラクター操作システムにおいて、
前記キャラクター発声モードが設定されている場合に、前記操作者の音声データをキャラクター用の音声データに変換する音声変換手段をさらに具備し、
前記キャラクター側音声出力手段は、前記キャラクター発声モードが設定されている場合に、前記キャラクター用の音声データを前記キャラクター側に出力し、前記操作者発声モードが設定されている場合に、前記操作者側音声入力手段によって入力された前記操作者の音声データを前記キャラクター側に出力する
ことを特徴とするキャラクター操作システム。
【請求項4】
請求項3記載のキャラクター操作システムにおいて、
前記キャラクター発声モードが設定されている場合に、前記操作者側音声入力手段によって入力された前記操作者の音声データを前記音声変換手段に提供し、前記操作者発声モードが設定されている場合に、前記操作者側音声入力手段によって入力された前記操作者の音声データを前記キャラクター側音声出力手段に提供する音声スイッチをさらに具備することを特徴とするキャラクター操作システム。
【請求項5】
請求項1乃至請求項4のいずれか1項に記載のキャラクター操作システムにおいて、
前記キャラクター側の状態を撮影した画像データを前記操作者側に出力する操作者側画像出力手段と、
前記キャラクター側の音の状態を測定した音データを前記操作者側に出力する操作者側音出力手段と
をさらに具備することを特徴とするキャラクター操作システム。
【請求項6】
キャラクターを操作する操作者側に備えられる操作者側音声入力装置及び操作者側画像入力装置と、前記キャラクター側に備えられるキャラクター側画像出力装置及びキャラクター側音声出力装置とに接続されるキャラクター操作装置において、
前記操作者による発声を行う操作者発声モードか前記キャラクターによる発声を行うキャラクター発声モードかの設定を受け付けるモード制御手段と、
前記操作者側音声入力装置によって前記操作者の音声データが入力されているか否か判断し、前記操作者の音声データが入力されていないと判断された場合に、前記操作者側画像入力装置によって入力された前記操作者の画像データを前記操作者の無発声状態の画像データとして記憶する記憶手段と、
前記キャラクター発声モードが設定されている場合に、前記記憶手段に記憶されている前記操作者の無発声状態の画像データを前記キャラクター側画像出力装置に提供し、前記操作者発声モードが設定されている場合に、前記操作者側画像入力装置によって入力された前記操作者の画像データを前記キャラクター側画像出力装置に提供する画像スイッチと、
前記操作者側音声入力装置によって入力された前記操作者の音声データを、前記キャラクター側音声出力装置に提供する提供手段と
を具備することを特徴とするキャラクター操作装置。
【請求項7】
請求項6記載のキャラクター操作装置において、
前記キャラクター発声モードが設定されている場合に、前記操作者の音声データをキャラクター用の音声データに変換する音声変換手段をさらに具備し、
前記提供手段は、前記キャラクター発声モードが設定されている場合に、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記音声変換手段経由で前記キャラクター側音声出力装置に提供し、前記操作者発声モードが設定されている場合に、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記キャラクター側音声出力装置に提供する音声スイッチであり、
前記キャラクター側音声出力装置は、前記キャラクター発声モードが設定されている場合に、前記キャラクター用の音声データを前記キャラクター側に出力し、前記操作者発声モードが設定されている場合に、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記キャラクター側に出力する
ことを特徴とするキャラクター操作装置。
【請求項8】
キャラクターを操作する操作者側に備えられる操作者側音声入力装置及び操作者側画像入力装置と、前記キャラクター側に備えられるキャラクター側画像出力装置及びキャラクター側音声出力装置とに接続されるコンピュータを、
前記操作者による発声を行う操作者発声モードか前記キャラクターによる発声を行うキャラクター発声モードかの設定を受け付けるモード制御手段、
前記操作者側音声入力装置によって前記操作者の音声データが入力されているか否か判断し、前記操作者の音声データが入力されていないと判断された場合に、前記操作者側画像入力装置によって入力された前記操作者の画像データを前記操作者の無発声状態の画像データとして記憶する記憶手段、
前記キャラクター発声モードが設定されている場合に、前記記憶手段に記憶されている前記操作者の無発声状態の画像データを前記キャラクター側画像出力装置に提供し、前記操作者発声モードが設定されている場合に、前記操作者側画像入力装置によって入力された前記操作者の画像データを前記キャラクター側画像出力装置に提供する画像スイッチ、
前記操作者側音声入力装置によって入力された前記操作者の音声データを、前記キャラクター側音声出力装置に提供する提供手段
として機能させるためのプログラム。
【請求項9】
請求項8記載のプログラムにおいて、
前記コンピュータを、前記キャラクター発声モードが設定されている場合に、前記操作者の音声データをキャラクター用の音声データに変換する音声変換手段として機能させ、
前記提供手段は、前記キャラクター発声モードが設定されている場合に、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記音声変換手段経由で前記キャラクター側音声出力装置に提供し、前記操作者発声モードが設定されている場合に、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記キャラクター側音声出力装置に提供する音声スイッチとして機能し、
前記キャラクター側音声出力装置は、前記キャラクター発声モードが設定されている場合に、前記キャラクター用の音声データを前記キャラクター側に出力し、前記操作者発声モードが設定されている場合に、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記キャラクター側に出力する
ことを特徴とするプログラム。
【請求項10】
キャラクターを操作する操作者側に備えられる操作者側音声入力装置及び操作者側画像入力装置と、前記キャラクター側に備えられるキャラクター側画像出力装置及びキャラクター側音声出力装置とを具備するシステムによるキャラクター操作方法において、
前記操作者側音声入力装置によって前記操作者の音声データが入力されているか否か判断し、前記操作者の音声データが入力されていないと判断された場合に、前記操作者側画像入力装置によって入力された前記操作者の画像データを前記操作者の無発声状態の画像データとして記憶し、
前記操作者による発声を行う操作者発声モードが設定されているか前記キャラクターによる発声を行うキャラクター発声モードが設定されているかを判断し、
前記キャラクター発声モードが設定されている場合に、前記記憶手段に記憶されている前記操作者の無発声状態の画像データを前記キャラクター側画像出力装置に提供し、前記操作者発声モードが設定されている場合に、前記操作者側画像入力装置によって入力された前記操作者の画像データを前記キャラクター側画像出力装置に提供するとともに、前記操作者側音声入力装置によって入力された前記操作者の音声データを前記キャラクター側音声出力装置に提供する
ことを特徴とするキャラクター操作方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2006−255147(P2006−255147A)
【公開日】平成18年9月28日(2006.9.28)
【国際特許分類】
【出願番号】特願2005−76488(P2005−76488)
【出願日】平成17年3月17日(2005.3.17)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
【公開日】平成18年9月28日(2006.9.28)
【国際特許分類】
【出願日】平成17年3月17日(2005.3.17)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
[ Back to top ]