
Fターム[2C150ED47]の内容
玩具 (16,863) | 制御 (873) | 制御手段 (529) | プログラム又は記録によるもの (443) | 学習機能を有する (32)
Fターム[2C150ED47]に分類される特許
1 - 20 / 32
ドットパターンが形成された媒体、ドットパターンを用いた情報入力方法、ドットパターンを用いた情報入出力方法、ドットパターンを用いた情報入力装置、ドットパターンを用いた情報処理装置
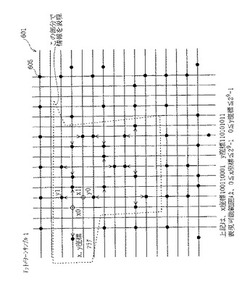
【課題】 極小領域であってもコード情報やXY座標情報が定義可能なドットパターン形成媒体を提案する。
【解決手段】 等間隔に所定個数水平方向に配置されたドットと、前記水平方向に配置されたドットの端点に位置する当該ドットから等間隔に所定個数垂直方向に配置されたドットと、前記水平方向に配置されたドットから仮想的に設定された垂直ラインと、前記垂直方向に配置されたドットから水平方向に仮想的に設定された水平ラインとの交点を格子点とし、該格子点からのずれ方でデータ内容 が定義された情報ドットと、からなり、前記垂直方向に配置されたドットの1つは、当該ドット本来の位置からのずらし方によって前記ドットパターンの向き を意味していることを特徴とするドットパターンを形成した。
(もっと読む)
コンテンツ提供システム、コンテンツ提供方法、及びコンテンツ提供プログラム

【課題】ユーザのコンテンツに対する反応を容易に取得でき、ユーザ嗜好に合ったコンテンツを提供する。
【解決手段】コンテンツ提供システムは、コンテンツを出力する出力部203と、ユーザの挙動を検出するセンサ212から得られる情報に基づいて、ユーザの挙動の種類を判定する判定部208と、出力部203で出力されたコンテンツに対応する判定部208による判定結果に基づいて、出力部203がさらに出力するコンテンツを決定するコンテンツ選択部209とを備える。
(もっと読む)
ロボット装置、ロボット装置の行動制御方法及びプログラム
【課題】 学習対象物の共有(共同注意)を可能として、適切に学習対象物を特定することを可能にする。
【解決手段】 ロボット装置は、学習対象物を特定する学習対象物特定手段として機能するセグメンテーション処理部132及び学習対象物検出部133が特定した学習対象物の情報を連想想起記憶部に記憶し、行動制御部により、新たな検出した物と連想想起記憶部に記憶した学習対象物の情報とに基づいて行動をする。
(もっと読む)
ヘリコプター玩具
【課題】 操縦が容易であって、且つ、スティックレバーで操縦する場合とは異なる嗜好を提供可能である音声によって操縦可能なヘリコプター玩具を提供する。
【解決手段】 本発明のヘリコプター玩具1は、送信機と、ヘリコプター形状の飛行体と、を備え、この飛行体は、充電式電池と、ロータと、ロータを回転駆動するモータと、受信回路を有した飛行体側制御回路とを備え、送信機は、操作者が発する音声指示を識別する音声識別手段107と、音声識別手段107によって識別された音声指示に対応して所定の操作信号を出力する信号生成手段109と、補助操作スイッチ59と、を備え、音声指示は、モータの回転始動を指示する第1の指示と、飛行体の上昇を指示する第2の指示と、飛行体の高度の維持を指示する第3の指示と、飛行体の下降を指示する第4の指示と、モータの回転の停止を指示する第5の指示と、を含む。
(もっと読む)
懐く挙動を示す玩具
ユーザーに懐く挙動を示す玩具、およびそのような挙動をシュミレートする方法が提供される。玩具は、ユーザーからの対話的入力を受ける入力センサ(18)と、ユーザーとコミュニケートする出力装置(24)と、プロセッサ(12)と、機械語命令を格納したメモリ(16)と、を備える。機械語命令により、プロセッサ(12)は、対話的入力を受け取り、受け取った入力信号を処理し、制御信号を出力装置に送る。プロセッサ(12)は、受け取った入力信号をポジティブまたはネガティブに分類し、当該分類に従ってメモリ(16)に記憶・蓄積された入力信号を調整する。制御信号は、蓄積された入力に依存している。 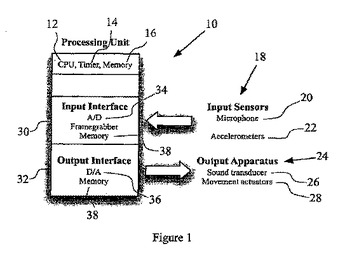 (もっと読む)
(もっと読む)
コミュニケーションロボットシステム、コミュニケーションロボット制御方法およびプログラム
【課題】人に情報を伝達する動作を実行するときの強制度合いの条件に対応して異なる動作を実行する。
【解決手段】コミュニケーションロボットシステム1は、基本条件DB2、制御装置12、入力部7およびロボット部8を備える。基本条件DB2は、人に情報を伝達する動作を実行するときの、強制度合いの条件に対応して異なる動作をロボット部8に実行させる変化部分を有するプログラムを格納する。行動認識部5は、入力部7から入力したデータに基づいて、人の行動を表す情報を取得する。強制度合決定部4は、行動認識部5で取得した人の行動を表す情報に基づいて、プログラムを実行するときの強制度合いの条件を決定する。タスク決定部3は、ユーザの行動と、基本条件DB2のファイルを照合してプログラムを抽出し、強制度合いの条件に応じてプログラムの変化部分を選択する。ロボット部8は、変化部分が選択されたプログラムに従って動作する。
(もっと読む)
ビートトラッキング装置、ビートトラッキング方法、記録媒体、ビートトラッキング用プログラム、及びロボット
【課題】雑音に対するロバスト性を確保するとともに、テンポ変動への追従性及びテンポ推定の安定性を確保する。
【解決手段】音楽音響信号MAから自己音声信号SVの音声成分をエコーキャンセルした音響信号にフィルタ処理を行い、オンセットを強調したオンセットベクトルを出力するSobelフィルタ部21と、オンセットベクトルに正規化相互相関関数を用いた時間周波数パターンマッチングを行ってビート間隔信頼度を求める時間周波数パターンマッチング部22と、ビート間隔信頼度に基づいてビート間隔を推定してテンポTPを出力するビート間隔推定部23とを備えた。
(もっと読む)
ロボットの好感度形成装置及びその方法
【課題】本発明は、ロボットとヒトとの情緒的インタラクションを通じて、互に好感度を形成する装置及びその方法を提供する。
【解決手段】本発明は、ユーザーの入力した特徴値の入力を受けてロボットとユーザーとの個人的な親密度を計算し、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度を計算して、ユーザーに対するロボットの好感度を計算する好感度生成部と、前記好感度生成部を通じて生成されたロボットの好感度によってロボットの感情強度を調節し、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する好感度表現部と、前記好感度表現部を通じて計算されたユーザーに対するロボットの好感度表現程度と、ユーザーの感情的反応の入力を受けて、2つの情報の差異に基づいて利益を計算し、これを利用してユーザーの入力特徴値を更新する好感度学習部とを包含する。
(もっと読む)
玩具
【課題】 加速度センサによって検出された加速度に基づいて無重力状態を検出し、無重力状態を入力の一つとして利用する玩具を実現する。
【解決手段】おしゃべり人形1100は、ヌイグルミ状の人形本体1190の中に、直交3軸の加速度を検出する加速度センサ1248とスピーカ1254とコントローラ制御ユニット1160とを備えた電子制御装置1130を内蔵する。電子制御装置1130は、加速度センサ1248で検出する加速度が3軸とも「ゼロ」で有る場合に無重力状態に有ると判定し、スピーカ1254から音声出力するように制御する。
(もっと読む)
楽器演奏ロボットおよび楽器自動演奏方法
【課題】周囲温度の差異、楽器の器差の影響等により発生する音高のずれを自動修正する。
【解決手段】本発明の一態様に係る楽器演奏ロボットは、演奏動作を行い楽器の演奏を行う楽器演奏ロボットであって、演奏動作により演奏した楽器の演奏音を入力するための音情報入力部31と、音情報入力部31に入力された演奏音の音高と基準音高とを比較し、音高のずれを判別する判別部と、判別部で判別された音高のずれに基づいて、演奏動作を修正する修正部とを備える。
(もっと読む)
コミュニケーションロボット及びその制御方法
【課題】対象者に応じて適切な発話を行うことができるコミュニケーションロボットを提供する。
【解決手段】対象者と会話によってコミュニケーションを図るコミュニケーションロボットであって、対象者の年齢及び反応に応じて発話信号の音量及び/又は周波数を制御する。コミュニケーションロボットは、対象者の年齢を判定する年齢判定部と、年齢判定部によって判定された前記対象者の年齢を入力する年齢入力部と、対象者の反応を判定する反応判定部と、反応判定部によって判定された前記対象者の反応を入力する反応入力部と、年齢入力部に入力された前記対象者の年齢及び反応入力部に入力された対象者の反応に応じて発話信号の音量及び/又は周波数を制御する発話制御部と、を有する。
(もっと読む)
脚式移動ロボット
【課題】姿勢安定制御や基本姿勢の維持などの観点から機体の各部位毎の質量分布を最適化する。
【解決手段】脚部における質量分布として、股関節ピッチ軸12と膝ピッチ軸14の間の部位の重心は、基本立ち姿勢と抱き上げ(直立状態)姿勢間で、股関節ピッチ軸と重力加速度ベクトルで構成される平面上に設定されている。これによって、直立状態において基本立ち上げ姿勢と抱き上げ状態を経る間における安定な姿勢遷移を実現することができる。
(もっと読む)
ロボット装置及びその制御方法
【課題】利用者に対してよりパーソナルなロボット装置を提供する。
【解決手段】過去における各利用者による操作履歴や対話履歴、及びロボット感情値を状態管理テーブル123に保持する。本ロボット装置の人物特定手段108は新たに遭遇した人物が過去の利用者であることが判明すると、感情・性格性格手段106は現在のロボット感情値122と状態管理テーブル123に保存された該当人物の過去のロボット感情値を参照して、新たなロボット感情値を生成する。
(もっと読む)
ペット型ロボット
【課題】散歩するペット型ロボットが共に散歩する人間から遠く離れてしまい交通の妨げとなったり、通行人の通行の障害にならないようにして、散歩する人間の足元近くに位置して共に散歩行動することのできるペット型ロボットを提供する。
【解決手段】通信部を介したユーザの指示に基づいた指示信号によるペットロボット本体の方向性、スピード調整および停止、並びにペットロボット本体が犬締結ヒモ程度の長さの範囲を越えることを示す信号を入力してペットロボット本体を一時停止させる制御を行う行動制御信号を生成させ、行動制御信号によって行動駆動部を駆動制御してペットロボット本体をユーザから犬締結ヒモ程度の範囲で散歩行動させる人工知能部を有する。
(もっと読む)
エネルギー効率の良いロボットシステム
受動型の動歩行を伴うエネルギー効率の良い二足歩行のロボットシステムは、枠を有する本体を含む。エネルギー回復機構は枠内に懸架される。エネルギー回復機構は荷重、荷重と枠とを相互接続する機械的エネルギー蓄積機構、及び荷重と枠に固定されたガイド手段を含む。機械的エネルギー入力機構は荷重と電気エネルギー発生機構とを相互接続する。出力手段は生成された電気エネルギーをエネルギー蓄積装置に移す。ロボットはまた本体部分に接続された脚を含む。受動型の動歩行中の周期的な脚の運動は、機械的エネルギー蓄積機構を通じて荷重に伝達され、結果として生じる荷重の振動運動は、機械的エネルギー入力機構によって電気エネルギー発生機構に移される。 (もっと読む)
音声出力玩具
【課題】音声出力玩具の興趣性を向上する。
【解決手段】音声出力玩具1のメモリカード16は、複数の音声情報を予め格納する音声記憶部162を備え、CPU21は、外部からの操作入力を受け付けて、受け付けられた操作入力に基づいてゲームの進行を制御すると共に、ゲームの進行に伴って予め設定された制御信号を出力するゲーム機器から制御信号を受信する制御信号受信部211と、受信された制御信号に基づいて、音声記憶部162に格納された複数の音声情報の中から、1の音声情報を選択し、選択された1の音声情報に対応する音声を出力する音声選択部216と、を備えている。
(もっと読む)
音声再生システム
【課題】事物認識能力を向上させるための言語学習を、幼児期の子供に、自発的且つ効率的にさせること。
【解決手段】RFIDタグ200は、対象物を特定する固有ID信号を送信する。音声発生部300は、RFIDタグ200から送信される固有ID信号を受信するアンテナ311と、受信される固有ID信号により対象物を識別する信号判読部312と、対象物に関する音声情報を保存する音声情報保存部320と、信号判読部312によって識別される対象物に関する情報を音声情報保存部320から読出す音声情報読出部314と、音声情報読出部314によって読出される情報を音声として出力する音声出力部330とを具備している。RFIDタグ200は、音声発生部300からの励起信号により、固有ID信号を送信する。
(もっと読む)
音声認識ロボット
【課題】音声認識ロボットの音声取得部のチューニングを効率良く行う。
【解決手段】音声認識ロボット100は、音声取得部として機能するマイクロホンアレー180と、音声出力部として機能するスピーカ170と、スピーカ170が装着されるロボットアーム160と、マイクロホンアレー180に対してチューニングを行うチューニング部を備える。チューニング部は、チューニングに際し、スピーカ170に基準音声を出力させるチューニング制御部と、基準音声に対する音声取得部の応答を用いてチューニングを実行するチューニング実行部とを有する。
(もっと読む)
コニュニケーションシステム
【課題】ペット型ロボットの動作を、単調で物足りなくならないような、しかも連帯感の持てる感情のこもった、動作とすることにより、良好なコミュニケーションが取れるコミュニケーションシステムを提供する。
【解決手段】一方のコミュニケーション装置で行われた操作者の動作を、他方のコミュニケーション装置に伝達するコミュニケーションシステムにおいて、一方のコミュニケーション装置1は、操作者の動作を検出する動作検出手段4と、動作検出手段4で検出された操作者の動作に応じて感情信号を生成し保持する感情生成手段5と、感情信号を他方のコミュニケーション装置3に送信する送信手段6と、他方のコミュニケーション装置3から送信された感情信号を受信する受信手段7と、感情信号を表示部に出力する情報出力手段8と、を備える。
(もっと読む)
再生装置、再生方法及び再生プログラム
【課題】
ユーザに対して、再生モードを直感的に通知することのできる再生装置を実現する。
【解決手段】
コンテンツデータを複数記憶した記憶部と、記憶部に記憶された上記コンテンツデータを読み出して再生する再生部と、再生部で再生されるコンテンツデータの再生内容に応じて所定の被駆動部を駆動する駆動部と再生装置に設け、再生部は、記憶部に記憶されたコンテンツデータを所定の順序で再生する通常再生モードと、記憶部に記憶されたコンテンツデータの一部を推薦曲として選出して再生するリコメンドモードの2つの再生モードを有し、駆動部は、再生部がリコメンドモードで動作しているとき、通常再生モード時に比して被駆動部をより機敏に動作させるようにした。
(もっと読む)
1 - 20 / 32
[ Back to top ]