
Fターム[2C150ED49]の内容
玩具 (16,863) | 制御 (873) | 制御手段 (529) | プログラム又は記録によるもの (443) | 指令と記憶又は設定値とを比較 (63)
Fターム[2C150ED49]に分類される特許
41 - 60 / 63
制御装置、対戦型ロボットシステム、及びロボット装置
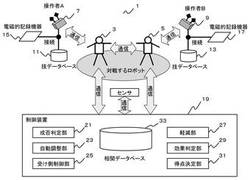
【課題】 操作者によって操作されて対戦する複数のロボット装置の制御に関し、種々の工夫を行って趣向性を高めることが可能な制御装置を提供する。
【解決手段】 操作者によって操作されて対戦する複数のロボット装置3、5を制御する制御装置19は、複数のロボット装置3、5のいずれかが操作者によって操作されて攻撃動作が実行される前に、当該攻撃動作が実行されることにより他の対戦相手のロボット装置3、5が受ける物理的影響の度合いが予め定められた範囲内に収まるように、実行される攻撃動作を自動調整する自動調整部23を備える。
(もっと読む)
ロボットとロボットの制御方法

【課題】 把持する物体の形状等を正確に把握することなく、物体を把持することができるロボットを具現化する。
【解決手段】 物体を把持するロボットであって、少なくとも2本の指を有するハンド部と、各指に少なくとも一つずつ配設されており、各指の所定箇所と把持対象物との接触を検出する接触センサ群と、少なくとも把持対象物の形状を記述する形状情報を入力し、ハンド部が把持対象物を把持したときに接触センサ群が出力する信号群を予測する予測手段と、接触センサ群から出力されている信号群が、予測手段によって予測された信号群に等しくなるように、各指の動作を制御するハンド制御手段とを備える。
(もっと読む)
玩具用ブロックセット及びその管理方法
【課題】組み立て手順書の更新・変更を容易にし、幼児の発達をより促すことが期待できるブロックとその管理方法を提供することを目的とする。
【解決手段】ブロックに無線チップを内蔵させ、ブロックを収納する収納箱が収納した無線チップ内の情報を取得できる機能と、取得した情報をインターネット経由で送ることのできる機能と、インターネットを介して受け取った情報を表示できる機能とを有することにより、ブロックを効率的に管理し、組み立て手順書を容易に更新することができる。
(もっと読む)
自律移動ロボットおよび自律移動ロボットによる物品運搬方法
【課題】自立移動ロボットが物品を取得元から主体的に受け取り、制振制御により揺れを押さえて運び、届け先に確実に届けることを可能とする。
【解決手段】物品の運搬には所定の仕様の運搬容器(M)を用いる。運搬容器には、画像識別のためのパタン(M2)および把持に適した形状の把持部分(M3)を備える。ロボット(R)は、取得元の画像から、運搬すべき物品を載せた所定仕様の運搬容器の把持に適した所定位置を認識する把持位置認識手段261と、把持部を運搬容器の所定位置に駆動し、所定位置を把持する制御を行う把持制御手段262と、把持部に作用する外力に基づいて把持に成功したか否かを判断する把持成否判定手段245とを備える。さらに、運搬中に、把持部に作用する外力を打ち消す帰還制御を行うことにより把持部の振動を押さえる制振制御手段410を備える。
(もっと読む)
ロボットおよび音声認識装置ならびにその方法
【課題】音声認識の精度を向上させることにより、誤動作の発生を低下させることのできるロボットおよび音声認識装置ならびにその方法を提供することを目的とする。
【解決手段】マイクロフォン14と、マイクロフォン14から入力された音声を認識する音声認識部50と、ロボット本体周辺の人物を検知する人物検知部51aと、人物検知部51aにより人物が検知された場合に、音声認識部50による音声認識結果を有効とする音声認識採否判断部53と、音声認識採否判断部53により音声認識結果が有効とされた場合に、該音声認識結果に対応する応答動作を実行する応答動作実行部53とを具備するロボットを提供する。
(もっと読む)
音声認識装置および音声認識装置を備えたロボット
【課題】 音声認識の頭切れを防止するとともに、テンポのよい会話を実現することができる音声認識装置および音声認識装置を備えたロボットを提供する。
【解決手段】 会話の台詞を組み立てる制御部53と、台詞に基づいて出力音声信号を生成する音声合成部55と、出力音声信号に基づいて出力音声を出力するスピーカ18と、ユーザ音声を少なくとも含む音声を入力信号に変換するマイクロフォン14と、入力信号から出力音声に係る信号成分を除去して入力音声信号を生成する出力音声除去部57と、入力音声信号に基づいてユーザ音声を認識し、認識結果を制御部53に出力する音声認識部59とを備え、制御部53,61が、台詞に基づいて、音声認識部59によるユーザ音声の認識開始のタイミングを、出力音声の出力開始から所定時間後、かつ、出力音声の出力終了前に制御することを特徴とする。
(もっと読む)
ロボットシステム
省電力ロボットシステム(100)は、移動式ロボット(104)のある環境下に置かれる、少なくとも1つの周辺装置(102)を含む。周辺装置は、周辺装置が完全に動作するアクティブモード(938)と、周辺装置が少なくとも部分的にアクティブでないハイバネーションモード(932)とをもつ制御装置(1026)を有する。移動式ロボット(104)は、無線通信構成要素(1024、1044)を経由して周辺装置(102)と通信し、周辺装置(102)の無線通信構成要素(1024、1044)とロボット(104)とが互いの範囲内になると、ハイバネーションモード(932)から周辺装置(102)を一時的に作動させる作動ルーチン(904)をもつ制御装置(1046)を有する。  (もっと読む)
(もっと読む)
ロボット用表現動作変換システム
【課題】人間の動作をたとえばモーションキャプチャで入力するだけで、その人間の動作に近似した動作を再現できるシステムを提供する。
【解決手段】動作変換システム100はモーションキャプチャ102を含み、モーションキャプチャ102で取得した人間の動作を、頭部,左手,右手および胴体の関係で、基準座標系に対する注目座標系の位置および向きデータとして記述しなおし、それをロボットの頭部,左手,右手および胴体の関係で、基準座標系に対する注目座標系の位置および向きデータとして近似し、その近似を満足するロボットの関節角度を計算する。
(もっと読む)
ロボットの制御方法及び制御装置
【課題】ロボット全体の動作を容易に、また、高速で制御可能な、ロボットの制御方法及びその装置を提供する。
【解決手段】ロボット(50)が取り得る姿勢から複数の姿勢(As〜Cs)が選択され、この複数の姿勢(As〜Cs)それぞれを特定する変数の組(A〜C)が座標(51a〜51c)と関連づけられてなる2次元マップ(51)から、任意に座標を読み出す座標読み出しステップと、読み出された座標に対応した変数の組(A〜C)で特定される姿勢(As〜Cs)をとるようロボット(50)に対して指示するステップと、を有する。
(もっと読む)
無線操縦飛行機
【課題】駆動部の容量を小さくすることができ、無線操縦飛行機を小型化することができるようにする。
【解決手段】飛行体11と、飛行体11と通信部を介して接続された飛行体11を飛行させる地上コントローラ12とを有する。飛行体11は、胴部14、胴部14に配設された駆動部、駆動部を駆動することによって推進力を発生させる推進装置、相対的に移動自在に配設された複数の翼体38、39から成る主翼25、各翼体38、39の相対的な位置を変更して、主翼25の実質的な面積を変更するための開閉機構43、及び被搬送物を選択的に保持し、落下させるための落下装置64を備える。主翼25の実質的な面積を変更することによって、飛行速度を変更することができるので、推進装置を回転させるための駆動部の容量を小さくすることができる。
(もっと読む)
再生装置、再生方法及び再生プログラム
【課題】
ユーザに対して、再生モードを直感的に通知することのできる再生装置を実現する。
【解決手段】
コンテンツデータを複数記憶した記憶部と、記憶部に記憶された上記コンテンツデータを読み出して再生する再生部と、再生部で再生されるコンテンツデータの再生内容に応じて所定の被駆動部を駆動する駆動部と再生装置に設け、再生部は、記憶部に記憶されたコンテンツデータを所定の順序で再生する通常再生モードと、記憶部に記憶されたコンテンツデータの一部を推薦曲として選出して再生するリコメンドモードの2つの再生モードを有し、駆動部は、再生部がリコメンドモードで動作しているとき、通常再生モード時に比して被駆動部をより機敏に動作させるようにした。
(もっと読む)
ペットロボット
【課題】
自律動作可能な愛玩・擬似飼育用ペットロボットを、ペットロボットの元来有する機能を活用しつつ最低限の新たな機能付加によって、遠隔地からの独居老人等擬似飼育者に対する安否確認・およびその結果の通報を簡易に且つ正確に行えるようにする。
【解決手段】
ペットロボット側からペットロボット擬似飼育者に対して何らかの動作要求を行い、前記動作要求に対して擬似飼育者が予め定められている応答動作を正しく行うか否かをペットロボット側で検知して擬似飼育者の安否判定を行い、判定結果を付加内蔵した通信機能によって予め定められている通報先に通報する。
(もっと読む)
遠隔制御デバイスに対する紛失または損傷を低減する方法および装置
第1送受信機(9)と、第2ワイヤレス送受信機(20)および第2プロセッサ(24)を有する遠隔制御式装置(18)を制御する第1プロセッサ(16)とを有する遠隔制御デバイス(12)。プロセッサは、ワイヤレス送受信機(複数可)によって送信される信号の信号品質レベルを測定して、信号品質レベルが、所定の閾値未満に下がる場合、遠隔制御式装置の向きを変えるようにプログラムされることができる。プロセッサ(複数可)は、遠隔制御デバイスの方に遠隔制御式装置の向きを変える(56)か、遠隔制御式装置を安全に停止させるか、または、信号品質レベルが所定の閾値を越えて留まる限り、遠隔制御式装置がミアンダリングするようにさせる制御信号を送信するようにさらにプログラムされることができる。 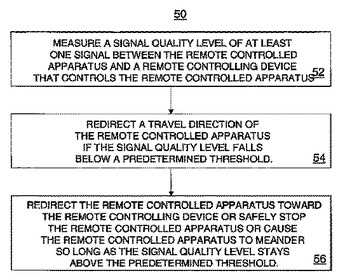 (もっと読む)
(もっと読む)
ロボットコミュニケーションシステム
【課題】この発明は、ユーザ自らの音声をユーザが希望するアクションとともに、ロボットを介してを出力することができるロボットコミュニケーションシステム提供する。
【解決手段】 スピーカ、各部駆動手段及びこれらを制御する制御部並びに通信手段を備えたロボット装置2と、通常の携帯電話機能とロボット装置2と通信を行って諸動作を行わせるためのアクションコマンドデータ並びにメッセージデータの送受信を行う送受信手段とこれらデータ情報を格納する格納手段を備えた携帯電話装置1と、を備える。携帯電話装置1より使用者の音声データからなるメッセージデータとロボットの諸動作を行わせるためのアクションコマンドデータを送受信手段よりロボット装置2に送信し、ロボット装置2は受信したメッセージデータとアクションコマンドデータに基づき、使用者の音声データの再生とアクション動作を行う。
(もっと読む)
二足歩行ロボットおよびその制御方法
【課題】本発明は、事前に予測した右足と左足の軌道データに対して実際の動作における右足と左足の位置に誤差が生じた場合であっても、両足が干渉しない二足歩行ロボットおよびその制御方法を提供することを目的とする。
【解決手段】本発明は、軌道データをもとに予測して右足F1と左足F2とが最も接近する時における右足F1と左足F2の間の最接近予測距離δ0を算出し、右足F1と左足F2の少なくとも一方に配置されるセンサ(S11、S12、S21、S22)により、一方の足に配置されるセンサと他方の足の間の実測距離を計測し、実測距離から右足F1と左足F2の間の最接近距離δ1を算出し、最接近距離δ1が最接近予測距離δ0よりも小さい場合には軌道データを補正し、補正された軌道データに従い右足F1と左足F2を立脚と遊脚に交互に変更しながら歩行を行なうことを特徴とする。
(もっと読む)
歩行ロボットおよび歩行ロボットの歩行制御方法
【課題】足裏材の偏摩耗の発生を抑制するとともに,偏摩耗が生じた場合であっても,その進行を抑制することを可能とする歩行ロボットおよび歩行ロボットの歩行制御方法を提供すること。
【解決手段】本発明の歩行ロボット1は,上体15と2以上の脚部10R,10Lとを有し,脚部10R,10Lを用いて歩行により移動する歩行ロボット1であって,脚部10R,10Lの足首の足首関節13R,13Lと,足首関節13R,13Lの角度により歩行時の足裏の初期接地位置を設定する初期接地位置設定部(コントローラ16)とを有し,初期接地位置設定部は,反復的に初期接地位置を変更するものである。
(もっと読む)
ロボットとその制御方法
【課題】 脚式ロボットにおいて、自律的に動作の安定性を評価しながら目標とする姿勢を実現することが可能な技術を提供する。
【解決手段】 本発明のロボットは、体幹と、脚リンクと、アクチュエータ群と、コントローラを備える。そのコントローラは、足先歩容データを読込み、足先歩容データに基づいて安定領域と安定ZMP軌道を計算し、安定ZMP軌道を実現する安定重心運動を計算し、安定重心運動を実現する安定姿勢パターンを計算し、目標姿勢パターンを読込み、安定姿勢パターンから目標姿勢パターンへ移行する移行姿勢パターンを計算し、移行姿勢パターンを実現するときの移行重心運動を計算し、移行重心運動を実現するときの移行ZMP軌道を計算し、移行ZMP軌道が安定領域の内部に収まる場合にアクチュエータ群へ移行姿勢パターンを出力し、移行ZMP軌道が安定領域の内部に収まらない場合にアクチュエータ群へ安定姿勢パターンを出力する。
(もっと読む)
玩具
無線リンクを介して、データを送信し、受信するための送受信機(24、28)と、プロセッサ(18、32)と、表現応答を記憶するためのメモリ(34)と、表現応答のための出力部(22、38)とを含み、表現応答に関するトリガーデータを受信し、トリガーデータが受信された場合に表現応答を選択し、前記出力部を介して前記表現応答を表現し、応答が出力されたことを示すトリガーデータを一斉送信するよう動作可能であることを特徴とする玩具が提供される。第2の玩具(12)のある所にある第1の玩具(10)からの第1の表現応答をアクティブにするステップと、前記第1の玩具(10)から前記第2の玩具(12)に、前記第1の表現応答を示すトリガーデータを送信するステップと、前記第2の玩具(12)が、前記データを受信した際に、メモリ(34)から第2の表現応答を選択し、前記第2の表現応答をアクティブにし、前記第1の玩具(10)に対する前記第2の表現応答を示すトリガーデータを送信するステップとを含むことを特徴とする第1(10)及び第2(12)の玩具間の交信の方法が提供される。 (もっと読む)
ロボット装置
【課題】 生物を模倣したロボット装置を提供する。
【解決手段】 生物の感情を模倣したロボット装置であって、不快感の強さを示す変数を保持する不快値保持部33と、不快感を増加させる増加信号の入力を受け付ける増加信号受付部31と、不快感を減少させる減少信号の入力を受け付ける減少信号受付部32と、増加信号の入力に応じて変数の値を増加させ、変数の値が下限値ではない場合に減少信号の入力に応じて変数の値を減少させる更新部34と、変数の値の減少に基づいて、快感の強さを示す値を算出する算出部35とを備える。
(もっと読む)
支持脚をもつ歩行ロボットのオフセット調整システム及びオフセット調整方法
【課題】 コストをかけることなく高精度なキャリブレーションを行うための支持脚をもつ歩行ロボットのオフセット調整システム及びオフセット調整方法を提供すること。
【解決手段】 支持脚を構成する関節のアクチュエータの駆動によって歩行可能な歩行ロボットに関し、その関節角度を計測する角度センサのオフセット調整を行うためのものであって、歩行ロボットが支持脚で立った状態の足平にかかる圧力を計測するための圧力センサ2と、関節のアクチュエータを駆動させる指令値を生成する演算装置21とを有し、演算装置は、圧力センサの2計測データに基づいてアクチュエータを駆動させて足平圧力の調整を行い、所定の圧力分布状態における前記角度センサの出力値から補正量を算出して記憶し、キャリブレーションの際、その補正量を加算して角度センサのオフセット調整を行うようにした支持脚をもつ歩行ロボットのオフセット調整システム。
(もっと読む)
41 - 60 / 63
[ Back to top ]