
Fターム[2D003BA03]の内容
Fターム[2D003BA03]に分類される特許
1 - 20 / 69
作業車両
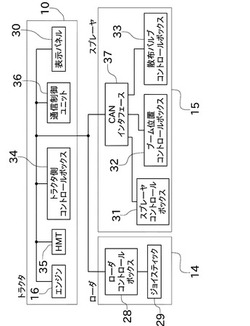
【課題】複数の作業機と通信を行う際の誤動作を防止した作業車両を提供する。
【解決手段】トラクタ10は、複数の作業機を接続可能である。また、トラクタ10は、通信制御ユニット36を備えている。通信制御ユニット36は、前記作業機と通信を行うことにより、当該作業機と連動した動作をトラクタ10に行わせることが可能である。そして、通信制御ユニット36は、各作業機とトラクタ10との前記連動の有無を設定可能であるとともに、当該設定を上書き可能である。
(もっと読む)
土工作業機械の進行方向を制御する方法及び装置

【目的】土工作業具を有する土工作業機械の進行方向を制御する方法及び装置を提供する。
【構成】方法及び装置は、機械の所望のヘッディングを求めること、機械の実際のヘッディングを求めること、所望のヘッディングの関数としての機械がたどる直線通路を求めること、実際のヘッディングの所望のヘッディングからの変位置を求めること、変位置の関数として作業具の所望のチルト角を求めること、及び作業具のチルト角を所望のチルト角に制御しこれに応答して機械を直線通路上に操舵することを含んでいる。
(もっと読む)
無人車両の走行システムおよびその走行制御方法
【課題】両側積込みで無人車両に走行指令を与えるに際して、左右の判断や左右指示ボタンによる操作を不要とし、作業性を向上させる。また、両側積込みで積込み点の位置を設定するに際して、左右の判断や左右指示ボタンによる操作を不要とし、作業性を向上させる。
【解決手段】両側積込みで無人車両に走行指令を与えるに際して、走行指令が指示されたときの作業機の向きまたは位置と、境界線の方向または位置とを対比して、積込機の作業機が左積込み点側に位置されたか、あるいは右積込み点側に位置されたかを判別する。また、両側積込みで積込み点の位置を設定するに際して、積込み点の位置設定が指示されたときの作業機の向きまたは位置と、境界線の方向または位置とを対比して、積込機の作業機が左積込み点側に位置されたか、あるいは右積込み点側に位置されたかを判別する。
(もっと読む)
トータルステーション用ターゲット及びそれを用いた建設用作業機械の制御方法
【課題】傾きを考慮した精度の高い水平座標位置データを求めることが可能なトータルステーション用ターゲットを提供する。
【解決手段】本発明のトータルステーション用ターゲット100は、トータルステーションから射出されるレーザー光を反射する光学部110と、光学部110と間の相対位置が変化することがないように固定されると共に、水平面内における第1の軸の周りの傾きを検出する第1傾斜センサ121と、前記光学部と間の相対位置が変化することがないように固定されると共に、水平面内における前記第1の軸と直交する第2の軸の周りの傾きを検出する第2傾斜センサ122と、前記第1傾斜センサ121によって検出された第1検出情報と、前記第2傾斜センサ122によって検出された第2検出情報とを出力する出力部123と、を有することを特徴とする。
(もっと読む)
ローダ作業機の油圧回路及びその油圧制御方法
【課題】ブームシリンダに供給可能な作動油をブーム制御弁から作業具制御弁へ一部短絡させて、作業具の掬い動作を全速で行いながらブームの下降速度を遅くする。
【解決手段】ブーム2を昇降させるブームシリンダ3用のブーム制御弁4と、ブーム制御弁4の下流側であって作業具5を掬い・ダンプさせる作業具シリンダ6用の作業具制御弁7とを備え、制御弁4、7に、水平線に対する作業具5の姿勢を維持しながらブーム2を上昇させる平行制御手段8と、作業具5を底面接地姿勢にすべく掬い動作させながらブーム2を下降させる水平接地制御手段9とを設け、ブーム制御弁4は、水平接地制御手段9の作動時にブームシリンダ3に供給可能な作動油の一部を、ブーム制御弁4のバイパスラインPB1から作業具制御弁7のメインラインPP2へ短絡させ且つブームシリンダ3を作動させた後の作動油に合流させて作業具制御弁7に供給する分流手段10を有している。
(もっと読む)
ハイブリッド建設機械の制御装置
【課題】ブームシリンダ等アクチュエータの下降時にオペレータが急にそれを停止させようとしたときにも、オペレータに操作上の違和感を持たせないでアクチュエータを停止させることができる。
【解決手段】操作弁14を介してメインポンプと接続したブームシリンダBCと、このブームシリンダBCの戻り油の一部を回生して回転する可変容量型の油圧モータMと、この油圧モータMの傾転角を制御するレギュレータ36と、油圧モータの駆動力で回転する電動・発電機MGとを備えている。そして、上記レギュレータ36は、油圧モータMに導かれる上記ブームシリンダBCからの圧力によって、電動・発電機MGの吸収エネルギー以上のトルクが作用しないように、油圧モータMの傾転角を制御して当該油圧モータの1回転当たりの押し除け容積を小さくする構成にしている。
(もっと読む)
建設車両の作業機の調整装置及び調整方法
【課題】バケットが地面に水平に接触している状態を精度良く検出すること。
【解決手段】バケット30を地面に水平に接触させた状態から、バケットを動かさずにブーム20を上方に回動させる。バケットシリンダ長算出部103は、基準ブーム角度毎に、ブーム角度センサ22からのブーム角度θaとベルクランク角度センサ33からのベルクランク角度θbとに基づいてシリンダ長テーブル104を参照し、バケットシリンダ31のシリンダ長を求める。補正量算出部105は、バケット水平接地時の基準シリンダ長と算出されたシリンダ長との差分を補正量として算出し、記憶する。
(もっと読む)
作業車両の油圧回路
【課題】作業用油圧アクチュエータの負荷圧力が変化した場合であっても、走行速度の変動を抑制することが可能な作業車両の油圧回路を提供する。
【解決手段】2つの油圧ポンプ21・22の吐出量を、負荷圧力に応じて制御するロードセンシングシステムを具備する旋回作業車1の油圧回路201であって、2つの油圧ポンプ21・22が吐出する作動油を合流させる走行合流弁31と、走行用油圧モータ5L・5Rに作動油が供給されたことを検出する走行圧力スイッチ102と、作業用油圧アクチュエータに対応する方向切換弁に付与されるパイロット圧を減圧する減圧弁と、走行圧力スイッチ102により走行用油圧モータ5L・5Rに作動油が供給されたことが検出された場合、減圧弁により方向切換弁に付与されるパイロット圧を減圧するコントローラ101と、を具備した。
(もっと読む)
掘削機
【課題】ブームの可動角度を制限しつつ、ブームを緩やかに停止させることができる掘削機を提供する。
【解決手段】機械本体101に対するブーム120のブーム角度αを検出し、ブーム用シリンダー130aにおけるブーム上昇側油室131への作動油の供給によりブーム120が上昇してブーム角度αが予め設定した機械本体101に対するブーム120の設定ブーム角度α0に達する場合にはブーム上昇側油室131への作動油の供給を停止させる掘削機100において、ブーム角度αと設定ブーム角度α0との差分値Δαの減少に伴って、ブーム上昇側油室131への作動油の供給量の減少割合を大きくする。
(もっと読む)
パラメータ可視化システム
作業現場上の土工機械の位置を示す三次元位置データを受信し、複数のパラメータの値を含むパラメータ情報を受信するように構成された制御装置を含むパラメータ可視化システムが開示される。複数のパラメータは土工機械と作業現場のうちの少なくとも1つのパラメータを含む。制御装置はさらに、複数のパラメータ内の第1のパラメータの値を提供するように構成された第1の表示信号を生成し、第1のパラメータの値の変更を受信し、第1のパラメータの値の変更に基づき第2のパラメータの値を計算し、作業現場の三次元視覚的描写に沿って第1のパラメータまたは第2のパラメータの少なくとも1つの値の視覚的描写を提供するように構成された第2の表示信号を生成するように、構成される。 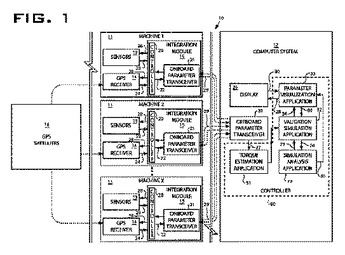 (もっと読む)
(もっと読む)
範囲外のセンサの再キャリブレーション
油圧駆動システムにおいて範囲外で動作しているセンサのキャリブレーションをリセットするための方法が提供される。油圧駆動システムは、ポンプ、リザーバ、複数のワークポート、複数のセンサ、バルブシステム、及び、要求流体量及び感知された圧力に基づいて油圧駆動システムを調整するためのコントローラを含む。この方法は、範囲外で動作しているセンサを検知し、すべてのワークポートをリザーバに開放し、リザーバの圧力にすべてのセンサをリセットし、最大ポンプ圧力の流体をすべてのセンサに供給し、かつ、各センサにおいて最大ポンプ圧力を感知することを含む。さらに、この方法は、すべてのセンサにわたる平均圧力値を決定し、範囲外で動作しているセンサに決定された平均圧力値を割り当て、かつ、リザーバの圧力及び平均圧力値に基づいて範囲外で動作しているセンサのキャリブレーションをリセットすることを含む。 (もっと読む)
建設機械の作業方法及び建設機械
【課題】 一連の作業を確実に実行することのできる建設機械の作業方法を提供することを課題とする。
【解決手段】 建設機械を用いて行なう一連の作業を複数の動作区間に分ける。動作区間毎に、実行すべき動作に対する動作目標値を設定する。各動作区間において動作目標値を達成するまでは、次の動作へ移行できないようにし、動作目標を達成したら次の動作区間への移行を許可する。
(もっと読む)
掘削支援装置
【課題】簡易、かつ、コストが安価な建設機械の掘削支援装置を提供する。
【解決手段】ブーム回動角度α、アーム回動角度β、バケット回動角度γをそれぞれ検出する各角度センサ7〜9と、バケット先端60が目標掘削面Dに位置したときに操作される制御スイッチ18と、制御スイッチ18の操作を受けて、各回動角度に基づきブーム4の回動支点を基準としたバケット先端60の位置を演算して目標掘削面Dに沿う掘削軌道を設定する演算手段と、ブーム4の動作を自動制御する制御手段とを備える。制御手段は、アーム5の掘削方向の動作時に、バケット先端60が掘削軌道上を移動するようアーム回動角度βの変化に応じてブーム回動角度αを変化させ、アームの掘削方向とは逆方向の動作時に、バケット先端60が掘削軌道よりも所定高さ上方を移動するようアーム回動角度βの変化に応じてブーム回動角度αを変化させる。
(もっと読む)
作業アームの位置制御装置を備えた移動作業機械および移動作業機械の作業アームを位置制御する方法
本発明は作業アーム(6)の位置制御装置を備えた移動作業機械(1)に関する。本発明による移動作業機械(1)は、第1端が関節により前記作業機械(1)の上部旋回体(3)取り付けられた作業アーム(6)と、作業アーム(6)の第2端に取り付けられたツール(9)とを有している。上部旋回体(3)には少なくとも1つの傾きセンサが取り付けられており、作業アーム(6)には少なくとも1つの別の傾きセンサが取り付けられており、作業アーム(6)にはさらに少なくとも1つの回転速度センサが取り付けられている。移動作業機械(1)はさらに、前記少なくとも1つの傾きセンサの信号、前記少なくとも1つの別の傾きセンサの信号および前記少なくとも1つの回転速度センサの信号を処理するための計算ユニット(17)を有している。  (もっと読む)
(もっと読む)
建設機械
【課題】簡単な構成で高温時のエンジンの負担を軽減することができる油圧ポンプの制御装置を提供する。
【解決手段】ディーゼルエンジン13で駆動する複数の油圧ポンプ21,31から一つの負荷12に圧油を供給する油圧経路10を備えた建設機械において、外気温を測定する温度センサと、負荷に供給される油圧を測定する圧力センサとを設けるとともに、温度センサで測定した温度があらかじめ設定された設定温度以上になり、かつ、圧力センサで測定した圧力があらかじめ設定された設定圧力以上になったときに、負荷に圧油を供給する油圧ポンプの台数を少なくし、ディーゼルエンジン出力に対してポンプ出力を低下させる。
(もっと読む)
旋回角度検出装置及びそれを備えた旋回式作業機械
【課題】旋回角度検出装置において、近接センサが頻繁に検出と非検出とを切り換えるのを防いで、旋回角度検出装置の信頼性を向上させる。
【解決手段】下部走行体(固定体)に回転軸を中心に回転自在に支持された上部旋回体10(回転体)の下部走行体に対する旋回角度を検出する旋回速度検出装置20として、上部旋回体10に近接センサ21を設け、下部走行体に近接センサ21に検出される被検出板22を設ける。被検出板22における近接センサ21に検出される部分の、上部旋回体10の回転軸を中心とする周方向端部を上部旋回体10の半径方向に延びる直線に対して傾斜させる。
(もっと読む)
無線操縦式車両の走行制御方法
【課題】送信機から送信した電波を車両の受信機で受信できなくなった場合に対処できる無線操縦式車両の走行制御方法を提供する。
【解決手段】送信機19から送信した電波により、この電波を受信するラジコン受信機16を搭載した作業機械車両11を無線操縦し、作業機械車両11は、移動しながらGPS受信機17により取得した自身の移動軌跡の位置座標を記録する。送信機19とラジコン受信機16との間で通信用の電波が途絶えたときに、作業機械車両11は、それまでに移動しながら記録した位置座標を逆にたどって、送信機19から送信された電波をラジコン受信機16で受信できる電波到達域A内まで戻る。
(もっと読む)
作業機の通信システム
【課題】作業機内に設けられた複数の作業機用制御装置に対して、プログラム等の更新を簡単に行うことができるようにする。
【解決手段】 車両用通信ネットワーク26に接続された複数の作業機用制御装置25を備えた作業機の通信システムであって、作業機用制御装置25の少なくとも1つは、車両用通信ネットワーク26に接続するための第1通信ポート40と、車両用通信ネットワーク26とは異なる通信に接続するための第2通信ポート41とを備えたゲートウェイ制御装置とされ、ゲートウェイ制御装置は、第2通信ポート41に入力された更新プログラム及び/又は更新データを、当該ゲートウェイ制御装置に書き込む動作と当該ゲートウェイ制御装置とは別の作業機用制御装置25に送信するために第1通信ポート40に出力する出力動作とを行う制御部32を備えている点にある。
(もっと読む)
連結ブルドーザ
【課題】ブルドーザによる土砂の掘削、運搬、敷き均し等を、比較的小型のブルドーザと少ない運転者によって、効率よく、安い費用で行えるようにする。
【解決手段】連結ブルドーザを提供する。連結ブルドーザは、走行方向に並行に所定の間隔でかつ先端のブレードを整列させて配置した一対のブルドーザと、ブルドーザの並行関係を維持して機体同士を一体的に連結する連結フレームと、ブルドーザそれぞれの電子コントローラの信号出力部を互いに連結する信号回線を備え、いずれか一方のブルドーザを操縦操作することにより他方のブルドーザも操縦操作する。
(もっと読む)
作業機械のステレオ画像処理装置
【課題】明るさが大きく変動する環境下における3次元形状計測に際しての各カメラによる撮影画像を、撮影部位の明るさが互いに同等となる撮影画像として取得できる。
【解決手段】アーム3に設けられ、明るさ調整用のマーカ6と、第1カメラ51、第2カメラ52のそれぞれの撮影画像よりマーカ6付近の撮影部位を検出するマウス9を含む撮影部位検出部と、この撮影部位検出部で検出された第1カメラ51、第2カメラ52による撮影部位の平均明るさA1,A2をそれぞれ求めるとともに、撮影部位それぞれの平均明るさA1,A2の差を演算する明るさ比較処理部72と、この明るさ比較処理部72によって求められた第1カメラ51、第2カメラ52による撮影部位それぞれの平均明るさA1,A2の差が少なくなるように、第1カメラ51、第2カメラ52のシャッター速度を調整する調整部とを備えた。
(もっと読む)
1 - 20 / 69
[ Back to top ]