
Fターム[2D003BB01]の内容
Fターム[2D003BB01]の下位に属するFターム
Fターム[2D003BB01]に分類される特許
201 - 220 / 320
油圧ショベルにおける旋回ポンプの制御システム
【課題】メインポンプとは独立して旋回ポンプが設けられた油圧ショベルにおいて、旋回押付け作業時におけるリリーフロスを少なくして、無駄なエネルギー消費を抑える。
【解決手段】油圧ショベルの行う作業が旋回押付け作業であるか否かを判断する作業判断部を設け、該作業判断部により旋回押付け作業である判断された場合には、旋回押付け作業以外の旋回を伴う作業の場合よりも旋回ポンプのトルクを低減せしめる旋回トルク低減制御を行うように構成した。
(もっと読む)
バッテリ駆動建設機械

【課題】内蔵バッテリの充電切れに効果的に対処することのできるバッテリ駆動建設機械を提供する。
【解決手段】内蔵バッテリを駆動源として油圧ポンプを作動させ、該油圧ポンプにて生成した油圧を用いて複数のアクチュエータを駆動するバッテリ駆動建設機械であって、商用電源接続コネクタおよび外部バッテリ接続コネクタと、上記商用電源接続コネクタを介して入力される商用交流電源を直流変換して内蔵バッテリによる前記油圧ポンプの駆動系に供給する交流・直流変換器と、前記外部バッテリ接続コネクタを介して入力される直流電源を電圧変換して前記内蔵バッテリによる前記油圧ポンプの駆動系に供給する電圧調整器とを備える。
(もっと読む)
作業機械の制御装置
【課題】 機械を操作する上で必要となる複数の操作情報を予めユーザ毎に設定し登録しておくことにより、ユーザ毎の盗難予防用の識別情報と前記複数の操作情報とをリンクさせて活用することができるようにする。
【解決手段】 コントローラ47は、テンキーパッド41により各ユーザ毎に個別に割当てられた解除IDに従って盗難予防制御装置40の施錠を解除すると共に、各ユーザが操作情報設定器42の特性入力部42Bにより個別に選択した特定の操作情報に従って作業装置等の作動を制御する。これにより、油圧ショベルに搭乗したユーザは、テンキーパッド41によりユーザ毎の解除IDを入力するだけで、ユーザが好みに応じて設定する複数の操作情報も自動的に設定することができ、複数の操作情報を盗難予防用の解除IDとリンクさせて活用できる。
(もっと読む)
流体圧制御装置
【課題】負荷保持状態から負荷を下降させる際に発生する衝撃を緩和すること。
【解決手段】制御弁6が遮断位置cの場合に負荷1による負荷圧が作用する負荷側圧力室2aと制御弁6とを接続する負荷保持機構20を備え、負荷保持機構20は、背圧室25の圧力に応じて負荷側圧力室2aから制御弁6への作動流体の流れを許容するオペレートチェック弁21と、負荷1を下降させる際にはメータアウト側の作動流体の流れを制御するメータアウト制御弁22とを備え、メータアウト制御弁22は、バイパス通路30とメイン通路7bとの連通の初期に、スプール56の移動量に対する開口面積の増加割合を抑制する開口面積抑制手段を備え、制御弁6が遮断位置xから負荷を下降させる位置bに切り換わる際には、制御弁6が開弁する前にバイパス通路30とメイン通路7bとが連通すると共に、開口面積抑制手段によってメイン通路7bの圧力上昇が抑制される。
(もっと読む)
作業車両用エンジンのパワー出力の制御方法及び制御装置
【課題】建設機械などの作業車両の作業の状態を検出して自動的にエンジンのパワー出力能力を制御する。
【解決手段】変速機(23)の選択されている速度段と、作業機(10)の位置又は姿勢と、車両(1)の走行速度とに基づいて、掘削が行われているか否かが判定される。また、車両(1)の前後方向の傾斜角と、走行速度と、アクセルペダルの開度と、走行加速度とに基づいて、登坂走行が行われているかが判定される。掘削又は登坂走行が行われている時は高パワー出力能力で、それ以外の時は低パワー出力能力で、エンジンが運転される。
(もっと読む)
作業車両用エンジンのパワー出力の制御方法及び制御装置
【課題】 エンジン制御装置40が、建設機械などの作業車両の作業の状態を検出して自動的にエンジンのパワー出力能力を制御する。
【解決手段】 アームの油圧シリンダ13の油圧検出器45、アームやバケットの操作指令の検出器32,33、変速機23のシフト操作検出器31、車体の傾斜角検出器46、走行加速度検出器47、アクセル開度検出器48からの検出信号に基づいて、掘削又は登坂走行が行われているか判定される。判定の結果、掘削又は登坂走行が行われている時は高パワー出力能力で、それ以外の時は低パワー出力能力で、エンジンが運転される。
(もっと読む)
ハイブリッド型作業機械の運転制御方法および同方法を用いた作業機械
【課題】ハイブリッド型作業機械において、電動駆動装置部側の各電気回路部分が温度上昇して作動不能とならないよう温度管理を行うハイブリッド型作業機械の運転制御方法および装置を提供する。
【解決手段】旋回慣性体60を回転駆動するための電動駆動装置部EDと油圧駆動装置部HDからなるハイブリッド型作業機械において、電動駆動装置部の蓄電装置90、インバータ/コンバータ102、電動・発電機ユニット70Aには、温度センサS1、S2、S3が設けられている。コントローラCUは、各温度センサからの検出温度θ1〜θ3のいずれか1つでも予め設定された温度を超えたときは、現在の、油圧駆動装置部に対するトルク指令値Tm、電動駆動装置部に対するトルク指令値Tem(Teg)の比率を低減する。
(もっと読む)
掘削旋回作業車の油圧装置
【課題】掘削旋回作業車において、不意の走行モータの作動による逸走を防止し、走行フィーリングの向上を図る。
【解決手段】アームシリンダ25からの戻り油と、ブームシリンダ23からの戻り油を前記左右のタンク通路46・47に戻すべく連通した場合に、該左右のタンク通路46・47に圧力差が生じて、中立状態の走行コントロールバルブ35・40のタンク通路46・47と連通する、走行油圧モータ15・15のカウンタバランスバルブ62が、該圧力差により連通側に作動し、走行油圧モータ15・15に圧油を供給して回転して逸走してしまうのを阻止すべく、ブームシリンダ23の戻り油と、アームシリンダ25の戻り油を同一側のタンク通路46・47に接続すると共に、両側のタンク通路58・59を外部配管70を介して連通した。
(もっと読む)
旋回体の駆動制御装置
【課題】ハイブリッドショベルにおいて、上部旋回体(3)の位置制御状態で外力により上部旋回体(3)が一定以上に旋回したとき、上部旋回体(3)の速度制御状態又はトルク制御状態から位置制御状態に切り換えられたとき、上部旋回体(3)の位置制御状態で停止指令になったときに、油圧制御と同様の操作フィーリングが得られるようにする。
【解決手段】位置制御状態で、外力の作用により上部旋回体(3)が一定角度以上に回転したとき、上部旋回体(3)の速度制御状態又はトルク制御状態から位置制御状態に切り換わったとき、停止指令になったとき、電動モータ(27)の出力トルクを保持したまま、その現在位置及び現在速度を基に目標位置、又は積分項を補正する。
(もっと読む)
旋回体の駆動制御装置
【課題】ハイブリッドショベルの上部旋回体(3)を電動モータ(27)で駆動する場合に、いかなる状態においても、速度偏差に対するモータ出力トルクの関係が限界を超えないようにして、上部旋回体(3)の振動を防止する。
【解決手段】上部旋回体(3)を旋回させる電動モータ(27)の目標速度を操作装置(31)の操作位置から算出して、該目標速度と電動モータ(27)の実際の速度との速度偏差を求め、該速度偏差に対するモータ出力トルクの関数に基づいて電動モータ(27)の出力トルクを求める。速度偏差に対するモータ出力トルクの関数に対し、その微分値の絶対値が所定未満となるように補正を加える。
(もっと読む)
建設機械の油圧制御装置
【課題】差圧調整部に油圧アクチュエータの操作状況に応じて生成される外部信号を導入してオペレータに操作上の違和感を可及的に少なくできるようにした建設機械の油圧制御装置を提供する。
【解決手段】差圧調整手段28のスプール28aは、その中間部に3つの径大部D1、D2、D3を有する。ばね28bを収納する油室RM1には、ポートPT1を介して油圧アクチュエータ側の圧力Psが導かれる。油室RM2に設けられたポートPT5には、ポートPT5を介してポンプ22の吐出口側の圧力Pdが導かれている。油室RM3に隣接して設けられたポートPT2に、高圧選択手段30により選択された最大圧力Pmaxが導かれ、スプールの右端面は油室RM5に臨んでおり、この油室には外部信号生成部32で生成された外部信号Zが与えられている。外部信号生成部32へは油電変換部32aで電気信号に変換された前記操作弁からの操作指令圧力Xが入力される。
(もっと読む)
差圧調整手段を有する建設機械の油圧制御装置
【課題】操縦者への操作上の違和感を少なくし、さらに、差圧調整機能を解除して操作指令圧力のみによりポンプ吐出流量を定めるようにした差圧調整手段を有する建設機械の油圧制御装置を提供する。
【解決手段】差圧調整手段28のスプールsprは、径大部D1、D2、D3を有する。油室R1には、ポートPT1を介して油圧アクチュエータ側の圧力Psが導かれる。油室R2には、ポートPT2を介してポンプ22の圧力Pdが導かれる。油室R3に隣接したポートPT3には、操作指令圧力Xが導かれ、油室R4に隣接したポートPT4はタンクラインTに導かれる。スプール右端はピン28cを介して外部信号Zが与えられている油室R5に臨んでいる。モード切換弁40により第1運転モードが選択されると、差圧調整が遂行され、第2運転モードが選択されるとスプールは右端限位置に保持され、操作指令圧力Xのみによりポンプ吐出流量が定められる。
(もっと読む)
建設機械
【課題】還元剤の残量が少なくなったときでも必要な動作を支障なく実施することができる建設機械の提供。
【解決手段】エンジンと、油圧シリンダ18、油圧モータ20を含む複数のアクチュエータと、エンジンの排ガス中の窒素酸化物を浄化処理する排ガス処理装置とを有する油圧ショベルにあって、還元剤残量検出装置33によって還元剤貯蔵タンク30内の還元剤の残量が所定残量以下となったとき、油圧シリンダ18によって駆動するフロント作業機の機能の発揮が難しくなるように油圧シリンダ18の作動を規制する規制制御と、このとき油圧モータ20によって駆動する走行体1、旋回体3の機能が発揮されるように、この油圧モータ20の作動を可能に保持する保持制御とを実施するアクチュエータ作動制御手段を備えた構成にしてある。
(もっと読む)
ハイブリッド建設機械
【課題】下部走行体(A)と、該下部走行体(A)に対して旋回自在に支持される上部旋回体(B)と、動力源としてのエンジン(2)と、該エンジン(2)により駆動される交流発電機(45)とを有するハイブリッドショベル(1)において、上部旋回体(B)の重量増加を抑制しつつ、後方小旋回要求と姿勢バランス要求との双方を満足させる。
【解決手段】少なくともエンジン(2)及び交流発電機(45)を下部走行体(A)に配設するようにする。
(もっと読む)
排土板付き特殊車両
【課題】感覚に頼ることなく作業効率を求めることができるので、無駄なく運転でき、省エネ、省力に適する排土板付き特殊車両を提供する。
【解決手段】排土板付き特殊車両において、上り下りの勾配測定装置と、揺動シリンダーの内部油圧を検出することによる土砂の排土板に掛かる圧力測定装置と、勾配測定装置と圧力測定装置との両検出値に基づく相互関係において、排土板を効率的な体勢に変えるながら押圧出力を調整し得る油圧制御装置とを具備してなることを特徴とする。
(もっと読む)
油圧駆動車両
【課題】大きな設置スペースを要することなく最高速度を増大すること。
【解決手段】エンジンEによって駆動される油圧ポンプ11と、油圧ポンプ11から吐出される圧油によって駆動される油圧モータ12と、油圧ポンプ11及び油圧モータ12の間に閉回路を構成する一対の走行用油通路13a,13bとを備えた走行系油圧ユニット10を具備し、油圧モータ12の駆動によって走行する油圧駆動車両において、エンジンEによって駆動される応援ポンプ40と、油圧ポンプ11から油圧モータ12に圧油が供給されている際に高圧側となる走行用油通路に対して応援ポンプ40から吐出された圧油を流入させる応援用制御弁30,応援用油通路47,高圧選択弁47bと、応援ポンプ40から一方の走行用油通路に圧油が流入された場合に他方の走行用油通路から圧油をドレンするドレン通路48、低圧選択弁48a、フラッシングリリーフ弁48bとを備えている。
(もっと読む)
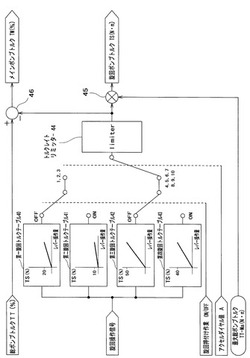
アクチュエータの制御装置
【課題】アクチュエータの動作状態に関係なく、アクチュエータをスムーズに動作させることができる制御装置を提供すること。
【解決手段】反ロッド側液室4bに対する作動油の給排を制御するメータイン用電磁弁V1及びメータアウト用電磁弁V4と、ロッド側液室4aに対する作動油の給排を制御するメータイン用電磁弁V3及びメータアウト用電磁弁V2と、アクチュエータの速度指令に対するメータイン用電磁弁及びメータアウト用電磁弁の開口面積の特性が規定された複数のマップと、アクチュエータの動作情報を検知する検知器にて検出された検出結果を基にアクチュエータの動作状態を判定する判定手段と、アクチュエータの動作状態に応じて、複数のマップから制御に用いるマップを選択する選択手段とを備える。
(もっと読む)
油圧アクチュエータ速度制御装置
【課題】作動油の供給不足時に油圧アクチュエータの作動速度が大きく低下しないようにする油圧アクチュエータ速度制御装置を提供する。
【解決手段】各油圧アクチュエータに対する速度コマンドC7、C8、C9に基づいて各コントロールバルブの開度をそれぞれ制御する油圧アクチュエータ速度制御装置であって、各油圧アクチュエータの作動が略停止する油圧アクチュエータ作動停止時を検出し(ステップ6、9、12参照)、その作動が略停止した油圧アクチュエータに対する速度コマンドC7、C8、C9を小さく補正し(ステップ7、10、13参照)、流量分配率Qr(=供給可能流量Qa/必要流量Qb)に基づいて各油圧アクチュエータ7、8、9に対する速度コマンドC7、C8、C9を補正する(ステップ18)。
(もっと読む)
作業車両
【課題】作業現場ごとに異なる積み込み作業の態様に適するように、エンジン出力を作業機及び走行装置に分配する。
【解決手段】エンジン21の出力を作業機のシリンダ13,15へ伝達する可変容量型油圧ポンプ27と、エンジン21の出力を走行装置のトルクコンバータ23へ伝達する可変クラッチ22と、ホイールローダの運転者が操作可能であって、作業機が作業を行っているときの走行装置の走行距離を調節するための作業設定ダイヤル60と、作業設定ダイヤル60が受け付けた入力に基づいて可変容量型油圧ポンプ27及び可変クラッチ22の可変度合いを制御するコントローラ200とを備える。
(もっと読む)
作業機械における油圧ポンプのポンプ容量制御装置
【課題】ポンプ容量検出のための特別な手段を要することなく、追従性の高いポンプ容量の制御を可能にする。
【解決手段】油圧ポンプ21,22のポンプ容量を制御するために、ポンプ容量推定値演算部43A,43Bと、目標ポンプ容量設定部44と、補正演算部46A,46Bと、信号出力部47とを備える。ポンプ容量推定値演算部43A,43Bは、目標ポンプ容量設定部44により設定される目標ポンプ容量と各センサの検出信号とに基づき、エンジン及び油圧ポンプにより構成される回転体についての運動方程式を利用してポンプ容量の推定値を演算する。補正演算部46A,46Bは、ポンプ容量の推定値と目標ポンプ容量との対比に基づいて目標ポンプ容量の補正量を演算し、信号出力部はその補正量に基づいてポンプ容量調節のための指令信号を作成し出力する。
(もっと読む)
201 - 220 / 320
[ Back to top ]