
Fターム[2D003BB04]の内容
Fターム[2D003BB04]の下位に属するFターム
Fターム[2D003BB04]に分類される特許
1 - 20 / 92
トンネル切羽の整形システムおよび整形方法
シリンダの長さの電子的な限界設定によるリッパーアタッチメントの深度制限
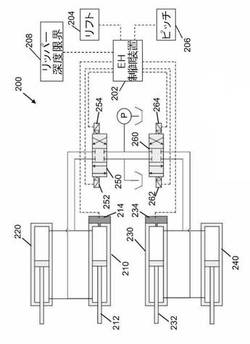
【課題】リッパー深度の変更時間を最小限に抑えるシステムを提供する。
【解決手段】リッパー深度制限システム200は、リッパーを上昇下降させるリフト入力、深度限界入力、リッパーリフトシリンダ210,220の位置を感知するリフトセンサー入力、およびリッパーをリッパー深度限界よりも上に保つリッパーリフトシリンダコマンドを生成・実行・修正する制御装置202を含む。深度限界入力は、複数の所定の深度限界から、または最低リッパー深度と最大リッパー深度の間、またはその他の手段によって、リッパー深度限界を選択し得る。リッパー深度制限システム200はまた、ピッチ入力およびリッパーピッチシリンダ230,240の位置を感知するピッチセンサーを含むことができ、制御装置202はリッパーピッチを生成・実行・修正するためのピッチ入力と、リッパーをリッパー深度限界よりも上に保つリフトシリンダコマンドを処理し得る。
(もっと読む)
速度に基づくフィードフォワード制御を実装するリフトシステム

【課題】速度に基づくフィードフォワード制御を実装するリフトシステムを提供する。
【解決手段】可動機械の作業器具をリフティングするための液圧システムが開示される。液圧システムは、ポンプ、リフトアクチュエータ、リフト弁装置、および実際のリフト速度を示す第1信号を生成するように構成されたリフトセンサを有してもよい。液圧システムはまた、チルトアクチュエータ、チルト弁装置、および所望のリフト速度を示す第2信号および所望の傾斜角度を示す第3信号を生成するために動くことができる少なくとも1つの操作者インターフェース装置を有してもよい。液圧システムはさらに、第2信号に基づいて加圧流体を計量するようにリフト弁装置に命令を出し、第3信号に基づいて加圧流体を計量するようにチルト弁装置に命令を出し、第1および第2信号に選択的に基づいて加圧流体を計量し、リフティングする間作業器具の所望の傾斜角度を維持するようにチルト弁装置に命令を出すように構成された制御器を有してもよい。
(もっと読む)
油圧ショベルの位置誘導システム及びその制御方法
【課題】本発明の課題は、油圧ショベルを作業に適した位置まで容易に移動させることができる油圧ショベルの位置誘導システム及びその制御方法を提供することにある。
【解決手段】油圧ショベルの位置誘導システムにおいて、最適作業位置演算部は、目標面(70)と作業可能範囲(76)との重なり合う掘削可能範囲(79)が最大となる車両本体の位置を最適作業位置として算出する。表示部は、最適作業位置を示す案内画面を表示する。
(もっと読む)
作業機械の作業範囲制御装置
【課題】作業機械の作業範囲制御装置に関し、フロント装置での作業時において安定性を向上させつつ作業性を向上させる。
【解決手段】下部走行体に対する上部旋回体の旋回姿勢を検出する旋回姿勢検出手段11L,11Rを設ける。また、フロント装置の作業範囲としての側方作業範囲を記憶する第一記憶手段32と、フロント装置の作業範囲として作業機械の機体中心から外端までの水平距離が該側方作業範囲よりも大きく設定された前方作業範囲を記憶する第二記憶手段33とを設ける。
さらに、フロント装置の作業範囲を制限する制御手段37を設け、該旋回姿勢が側方姿勢である場合に作業範囲を該側方作業範囲の内側に制限する。一方、該旋回姿勢が前方姿勢である場合に作業範囲を該前方作業範囲の内側まで拡大する。
(もっと読む)
建設機械
【課題】 ブーム、アーム、及びバケット等の作業要素に荷重検出器を取り付けずに、作業要素の位置及び姿勢から掘削反力を求めることで、掘削動作における過負荷を判定し、作業要素の動作を制御することのできる建設機械を提供することを課題とする。
【解決手段】 掘削作業を行なう建設機械の制御部は、ブーム角度、アーム角度、バケット角度、及び土砂特性に基づいて、バケットに作用する土砂の掘削反力を算出し、算出した掘削反力が予め設定した上限値より大きいか否かを判定して掘削動作を修正すべきか否かを判断する。
(もっと読む)
機械上の参照位置に対する器具上の位置を決定するためのシステムおよび方法
開示は、一態様において、機械上の参照位置に対する機械上の位置を決定するための方法を記載している。本方法は、座標系における参照位置を決定するステップと、座標系における機械上の第1の所望される位置を決定するステップと、参照位置に対する第1の所望される位置を決定するステップとを含む。本方法は、さらに、第1の相対的な所望される位置を用いて制御システムを更新するステップを含む。  (もっと読む)
(もっと読む)
機械の生産性を最大化するとともに最終勾配を保つように器具を制御するためのシステムおよび方法
開示は、一態様において、器具に動作的に接続されたコントローラを含む器具制御システムを記載している。コントローラは、第1の信号および第2の信号を、器具と動作的に通信するシステムから受信するように適合されている。第1の信号は、所望される負荷制御状態を示し、第2の信号は、所望される勾配制御状態を示す。コントローラは、さらに、第1の信号に関連付けられた第1の比較可能な特性を有する第1の目標位置を決定するとともに、第2の信号に関連付けられた第2の比較可能な特性を有する第2の目標位置を決定するように適合されている。また、コントローラは、第1の比較可能な特性および第2の比較可能な特性に部分的に基づいて、器具を第1の目標位置または第2の目標位置に移動させる制御信号を生成するように適合されている。  (もっと読む)
(もっと読む)
高さ調節可能なリフト装置を備えた貨物運搬車
【課題】高さ調節可能なリフト装置を備えた貨物運搬車における転倒危険をさらに低減させることである。
【解決手段】貨物運搬車は、貨物を受け取るための高さ調節可能なリフト装置と、さらに少なくとも1つの運動方向の加速度を測定するための加速度センサ装置と、受け取られた貨物重量を決定するためのセンサと、前記リフト装置のリフト高さを決定するためのセンサと、を備えている。制御/操作装置内において、走行状態を調節する少なくとも1つの車両内装置を設定するための操作信号が発生可能である。加速度センサ装置はリフト装置上に配置されている。
(もっと読む)
油圧ショベルの作業腕制御装置
【課題】簡単な構成で、水平面、法面などの均し作業を行うことができ、かつオペレータにとって操作が容易な、油圧ショベルの作業腕制御装置を提供する。
【解決手段】制御装置26を備え、制御装置26は、作業腕12のアーム16およびアーム16を連結したブーム14のアームシリンダ20およびブームシリンダ18の同時操作によって作業具が連結されるアーム16の先端が一定の時間略直線の軌跡Kに沿って移動しているときには、アーム16の作業具連結中心17とブーム14のアーム連結中心15を結ぶ連結線Lがこの直線軌跡Kに対して直角に近づくにつれ、ブームシリンダ18の作動速度をブーム操作器24の操作に応じた速度よりも遅くする。
(もっと読む)
作業車両
【課題】作動油が低温の場合に油圧モータの容量制御においてハンチングが発生することを抑えることができる作業車両を提供する。
【解決手段】 作業車両では、制御部は、駆動油圧検知部によって検知される駆動油圧が所定の目標駆動油圧に近づくようにフィードバック制御によりモータ容量制御部を制御する。また、制御部は、油温検知部によって検知された作動油の温度が所定温度より低い場合には、油圧モータの最大容量を低下させる低温時モータ容量制限制御を実行する。
(もっと読む)
掘削支援装置
【課題】簡易、かつ、コストが安価な建設機械の掘削支援装置を提供する。
【解決手段】ブーム回動角度α、アーム回動角度β、バケット回動角度γをそれぞれ検出する各角度センサ7〜9と、バケット先端60が目標掘削面Dに位置したときに操作される制御スイッチ18と、制御スイッチ18の操作を受けて、各回動角度に基づきブーム4の回動支点を基準としたバケット先端60の位置を演算して目標掘削面Dに沿う掘削軌道を設定する演算手段と、ブーム4の動作を自動制御する制御手段とを備える。制御手段は、アーム5の掘削方向の動作時に、バケット先端60が掘削軌道上を移動するようアーム回動角度βの変化に応じてブーム回動角度αを変化させ、アームの掘削方向とは逆方向の動作時に、バケット先端60が掘削軌道よりも所定高さ上方を移動するようアーム回動角度βの変化に応じてブーム回動角度αを変化させる。
(もっと読む)
建設機械のディスプレイ装置
【課題】建設機械のディスプレイ装置に関し、簡素な構成で、GPSをはじめとする自動測位装置が使用できない環境下においても正確な測位を実施し、作業性をさらに向上させる。
【解決手段】建設機械の初期位置を手動で入力するための初期位置入力手段1と、該建設機械の該初期位置からの相対変位を算出する相対変位算出手段2と、該初期位置及び該相対変位に基づいて推定位置を算出する推定位置算出手段5と、を備える。
また、該建設機械の姿勢を算出する姿勢算出手段3と、該建設機械のキャブ内に搭乗するオペレータの目視位置を算出する視点算出手段4と、を備える。
さらに、該推定位置,該姿勢及び該目視位置に基づいて施工計画図のキャブガラス上への投影図データを演算する投影図演算手段6と、投影図演算手段で演算された該投影図データを該キャブガラス上に表示する表示手段29とを備える。
(もっと読む)
産業車両の変速制御装置
【課題】作業効率の低下を防止できる産業車両の変速制御装置を提供する。
【解決手段】バケット112の高さが第1設定高さを超えると、変速許可速度を上昇させて、シフトアップが起こり難くなるように構成した。これにより、たとえば、Vシェープローディングにおいてアクセルペダル11を大きく踏み込まない状態であっても、変速許可速度の低下によるオペレータの意図に反するシフトアップ、およびこのシフトアップに起因するホイールローダ100の増速を抑制できる。したがって、ダンプトラックへの積み込みに必要な高さまでバケット112が上昇する前にホイールローダ100がダンプトラックに到達してしまう、という不具合を防止して、作業効率の低下を防止できる。
(もっと読む)
水中走行車両およびその制御方法
【課題】本体からの走行部の突出を抑制しつつ、平衡走行をも確保できる水中走行車両および水中走行車両の制御方法を提供する。
【解決手段】水中走行車両1は、本体10と、その前後に設けられたフリッパ式クローラ30(走行部)と、前後のクローラ30を揺動させる移動手段と、移動手段を制御する演算手段を備え、演算手段は、車両に働くモーメント、すなわち、重量に起因するモーメントと、浮力に起因するモーメントと、前後方向の移動に伴う流体抵抗に起因するモーメントと、推進力に起因するモーメントと、接地面から受ける垂直抗力によって生じるモーメントに基づき、車両が平衡状態にあるか否かを判断し、平衡状態と判断した時には前後のクローラ30を格納位置に維持し、車両1が前方へ倒れる恐れが高いと判断した時には、前側のクローラを前方に半転させ、車両1が後方へ倒れる恐れが高いと判断した時には、後側のクローラ30を後方に半転させる。
(もっと読む)
制御システム、制御方法、操作制御装置及び作業装置
【課題】被制御体とその周辺にある障害物とが接近していることを操作者に伝えて遠隔制御に係る操作性を向上させる。
【解決手段】ロボット10は、ロボットハンド先端部とその周辺にある障害物との距離Lと、ロボットハンド先端部の移動速度Vを特定し(S1,S2)、ロボットハンド先端部が障害物に接触するまでの推定接触時間を算出する(S3)。ロボット10は、ロボットハンド先端部が障害物に接近している旨を通知する接触情報を操作制御装置20宛てに送信した時から、通信路を経由して接触情報が操作制御装置20に到達するまでの伝送所要時間の予測値Tdを取得する(S4)。ロボット10は、推定所要時間が予測値Tdと規定時間Trとの和以下になると(S5;YES)、接触情報を送信する(S6,S7)。これにより通信遅延の程度に関わらず、操作制御装置20は、現に接触がある前に接触情報に基づき両者の接近を報知する(S8,S9)。
(もっと読む)
建設機械
【課題】建設機械において、バケットチルトエンド位置付近での緩停止制御を行なうとともに、バケットチルトエンド位置付近での荷位置調整操作や暖機運転も行えるようにする。
【解決手段】高速バケットチルト操作が、バケットチルトエンド位置の近傍区間(B区間)より遠い位置(A区間)で開始された場合には、バケットが上記B区間に入った時点からバケットチルトの速度を強制的に減速するよう、緩停止制御を行う。他方、高速バケットチルト操作がB区間内の位置(S点)で開始された場合には、緩停止制御による減速開始位置(T点)を、高速バケットチルト開始位置(S点)より所定のオフセット距離分だけバケットチルトエンド位置に近い位置にずらす。さらに、高速バケットチルト操作が、バケットチルトエンド位置にほぼ相当する位置(C区間)で開始された場合には、緩停止制御を実行しない。
(もっと読む)
掘削支援装置および掘削支援方法
【課題】建設機械による直線掘削を簡便に且つ精度良く行うことができる掘削支援装置を提供する。
【解決手段】建設機械を用いた掘削作業を支援する装置であって、掘削箇所近傍に設置され、レーザ光を基準面Sに沿って出射する投光器2と、レーザ光を受光する受光部を長手方向に沿って複数有し、アーム4に取り付けられる受光器11と、アーム4の傾斜角度を検知する傾斜センサ12と、受光器11及び傾斜センサ12の検出信号に基づいて基準面Sからバケット3先端までの実際の掘削深さH1を演算し、これを予め設定された指定掘削深さH3と比較して掘削誤差H2を求める制御部とを備える。
(もっと読む)
ブームスイング式油圧ショベル
【課題】 アーム先端までの前方旋回半径を小径とし得るようにしたブームスイング式油圧ショベルを提供する。
【解決手段】 走行体1に旋回可能に配置された旋回体2と、旋回体2に配置された運転室3と、旋回体2にスイング及び起伏可能に枢支されたブーム7と、ブーム7の先端に垂直面内を回動し得るよう枢支されたアーム9と、アーム9の先端に垂直面内を回動し得るよう枢支されたバケット11とを備えたブームスイング式油圧ショベルであって、ブーム7がスイングするスイング中心点を、平面視で旋回体2の左右何れか一側に、運転室3の旋回体2幅方向中心側側部に位置するよう設け、ブーム7のスイング及び起伏を油圧シリンダ8により行うようにし、油圧シリンダ8の作動を油圧回路及びシーケンス回路を用いて行うよう構成する。
(もっと読む)
無線操縦式車両の走行制御方法
【課題】送信機から送信した電波を車両の受信機で受信できなくなった場合に対処できる無線操縦式車両の走行制御方法を提供する。
【解決手段】送信機19から送信した電波により、この電波を受信するラジコン受信機16を搭載した作業機械車両11を無線操縦し、作業機械車両11は、移動しながらGPS受信機17により取得した自身の移動軌跡の位置座標を記録する。送信機19とラジコン受信機16との間で通信用の電波が途絶えたときに、作業機械車両11は、それまでに移動しながら記録した位置座標を逆にたどって、送信機19から送信された電波をラジコン受信機16で受信できる電波到達域A内まで戻る。
(もっと読む)
1 - 20 / 92
[ Back to top ]