
Fターム[2F024AB07]の内容
対地移動距離の測定 (874) | 移動量の検出、変換、積算 (55) | 検出、変換、積算の結合 (18)
Fターム[2F024AB07]に分類される特許
1 - 18 / 18
移動距離算出装置、移動距離算出システム、移動距離算出プログラム、及び移動距離算出方法

【課題】複数の移動距離算出装置で計測対象の移動距離を計測する移動距離算出システムであって、省エネルギー性に優れ、障害にも耐性のある構成を提供する。
【解決手段】移動距離算出システムを構成するプロッタ装置11a〜11cは、記憶部と、通信部と、制御部と、を備える。記憶部は、移動距離の計測の開始時刻と、計測中の所定の時刻又は計測終了時の時刻である計測時刻と、開始時刻から計測時刻までの間に計測対象が移動した距離と、を含む情報である計測情報を記憶する。通信部は、計測情報をプロッタ装置11a〜11c同士で送受信する。制御部は、通信部が受信した計測情報を記憶部に記憶し、当該記憶部が記憶する計測情報を、開始時刻及び計測時刻に基づいて重複する計測情報を除外しつつ移動距離を積算することで、計測対象の総移動距離を算出する。
(もっと読む)
加速度検出装置、電子機器、歩数計、及びプログラム

【課題】省電力化できること
【解決手段】第1の方向と、第1の方向とは独立な第2の方向と、の加速度を検出する電子機器に備えられる加速度検出装置において、第1の方向の加速度の大きさが、予め定めた値を超えたときに、第1の方向における加速度の検出に用いるサンプリング周期を短くするサンプリング周期縮小部を備える。
(もっと読む)
歩行データ計測装置
【課題】歩行データを精度良く計測する。
【解決手段】計測装置10は、接地センサ14、24、走査型光学距離センサ(LRF)12、受光器22a、22b、演算ユニット18を備える。LRF12は、測距用照射光の強さを変化させることによって照射光に情報を含ませることができる。各受光器は、受光した照射光に含まれている情報を読み取ることができる。計測装置10は、接地センサが接地を検知している間、LRFが照射方向を示す照射方向情報を含ませた照射光を照射して各照射方向における距離を計測する。次いで、各受光器が、受光した照射光に含まれている照射方向情報、及び、自己を識別するための受光器識別子を演算ユニットへ送信する。演算ユニットは、受光器識別子と照射方向情報と各照射方向の計測距離から一方の足に対する各受光器の方向と距離を算出し、各受光器の方向と距離から2つの足の相対位置を算出する。
(もっと読む)
車両用走行距離積算値記憶システム
【課題】データの改竄を効果的に防止すること。
【解決手段】車両の走行距離を取得する走行距離取得手段と、符号化された走行距離積算値に関する情報が分割記憶される複数の記憶手段と、複数の記憶手段に記憶された情報を復号して基準走行距離を算出する基準走行距離算出手段と、走行距離取得手段により取得された車両の走行距離を基準走行距離算出手段により算出された基準距離に加算して走行距離積算値を算出する走行距離積算値算出手段と、走行距離積算値算出手段により算出された走行距離積算値を符号化すると共に符号化された走行距離積算値に関する情報を分割して複数の記憶手段に分割記憶させる符号化・分割手段と、を備え、基準走行距離記憶手段は、所定のタイミングで複数の記憶手段に記憶された情報のいずれかに誤りが存在するか否かを判定し、誤りが存在すると判定された情報を訂正する車両用走行距離積算値記憶システム。
(もっと読む)
走行距離演算方法
【課題】速度や走行距離のデータを必要とする車両用電装品が複数ある場合であっても、走行距離表示の精度を低下させることなく、演算処理の負担を軽減させること。
【解決手段】車載用ネットワークであるCAN13との通信データ中の速度データより求めたパルス数を走行距離に換算し、該換算によって生じた余りを積算し、該積算した余りが走行距離の最低単位を超えたとき、パルス数を走行距離に換算したときの商に1加算し、さらに積算されている余りを1減算し、パルス数を走行距離に換算したときの商、又は1加算された商を、現時点での走行距離計器15による走行距離を示す距離パルス数に積算し、該積算した距離パルス数から走行距離計器15に表示させるための距離を計算するようにし、車載用ネットワークであるCAN13を介して得られる速度データのみで走行距離の演算が精度良く行われるようにした。
(もっと読む)
補助トリップメータのカウント装置
【課題】補助トリップメータに走行距離を表示する際に、製造コストを抑えながら、トリップメータに表示される走行距離との誤差を確実に抑えることができる補助トリップメータのカウント装置を提供する。
【解決手段】カウント装置31は、カウントアップ信号Sを受信した場合には、リセット時からの走行距離D1と、トリップメータ22bの走行距離DbがカウントアップB1されるまでの予想走行距離D2を求めて、この予想走行距離D2を車速で除して予想走行時間t2を求める。また、カウント装置31は、カウントアップ信号Sの受信時から走行時間の計測を開始し、この走行時間が予想走行時間t2に到達した場合には、補助トリップメータ32の走行距離Dcを1kmカウントアップC1する。
(もっと読む)
体動検出装置
【課題】所定間隔で検出される複数の体動を連続と判断し、前記体動の連続した検出に基づいて体動を計数し、体動を計数するごとに体動数を切り替えて表示する体動検出装置においてより的確な体動(歩数)表示をおこなうこと。
【解決手段】体動の連続検出中に、姿勢変化検出部44によって姿勢の変化が検出された場合に、当該姿勢の変化が検出されてから所定時間が経過するまで体動数の切り替え表示を停止し、姿勢の変化が検出された後、前記所定時間の間に検出された体動数を計数し、当該所定時間の経過後に、計数された体動数を表示が停止されていた体動数に加算して表示するので、姿勢変化後の歩行以外の振動に対応した歩数表示のカウントアップを防止する。
(もっと読む)
車両速度検出装置
【課題】
車両速度・位置検知において、車輪の粘着状態や路面状態に依存しない検出手段を提供する。
【解決手段】
回転センサと、車両の速度を車輪の回転によらず検出する非接触型速度センサと、車両の加速度を検出する加速度センサと、回転センサ,非接触型速度センサ,加速度センサの出力に基づき車輪の空転または滑走を検知する手段と、非接触型速度センサの出力に基づき路面状態を検知する手段と、粘着状態を検知する手段と、路面状態を検知する手段に基づき、車両速度および位置の演算方式を切り替える。
(もっと読む)
デッドレコニング装置
【課題】歩行者に装着されたセンサシステムによって人の歩行動作を計測、解析し、その移動方位と歩幅を装着型計算機システムが推定することにより、その歩行者に対して道案内などのアプリケーションを提供するために利用するデッドレコニング装置を提供する。
【解決手段】歩行動作に基づいて基準位置からの相対移動ベクトルを出力するデッドレコニング装置において、歩行動作を計測、解析して一歩ごとに歩行動作の移動方位と歩幅を推定して出力する手段と、前記出力された移動方位と前記出力された歩幅の信頼性を算定して出力する手段と、前記出力された移動方位と前記出力された歩幅に基づいて基準位置からの相対移動ベクトルを推定して出力する手段と、前記出力された移動方位と前記出力された歩幅、前記出力された移動方位の信頼性、前記出力された歩幅の信頼性に基づいて、前記出力された相対移動ベクトルの信頼性を算定して出力する手段を備える。
(もっと読む)
移動量検知装置
【課題】移動量を精度よく検出すること。
【解決手段】移動体に搭載されて床面を撮像する第1および第2撮像部と、第1および第2撮像部によって撮像された画像データを用いて移動体の移動量をそれぞれ第1および第2移動量として算出する画像解析部と、第1および第2移動量のいずれかをその信頼度から真の移動量として判別する制御部とを備え、第1および第2撮像部は異なる被写界深度を有することを特徴とする。
(もっと読む)
歩行者の動態検知装置
【課題】
上下移動を伴う歩行動態を正確に認識できる装置がなかった。また、上下移動を伴う歩行動態では、平面歩行とは異なる歩幅で歩く事になるがそれを検知する装置がなかった。
【解決手段】
高度変化を検知するセンサと平面での歩行動態を検知する装置を組合せ上下移動を考慮した歩行動態を検知する。
【効果】
本発明によれば、上下移動を伴うような歩行動態が認識できるようになる。さらに、歩幅を正確に検知できるようになり精度の高い位置検知が可能になる。また、歩行動態と地理情報を比較して地理上のどこにいるかを推定できるようになる。
(もっと読む)
運動データ表示制御装置、携帯型機器及びプログラム
【課題】位置データが取得できない場合であっても正確な運動データをユーザに提供すること。
【解決手段】ユーザの運動中、位置データが取得されたと判別した場合は、この位置データに基づいて現在の運動データを算出する(A7→A13、A15)が、取得されなかったと判別した場合は、振動データから運動データを換算するための換算データを、検出された振動を示す振動データと算出した運動データとに基づいて算出・記憶しておき(A7→A19)、取得されなかったと判別した時点から取得されたと判別するまでの間、換算データに基づき、検出された振動から現在の運動データを換算・推定し(A7→A29、A31)、取得されたと判別している間は、算出した運動データを最新の運動データとして表示制御し、取得されなかったと判別した時点から取得されたと判別するまでの間は、推定した運動データを最新の運動データとして表示制御する(A21、A23)。
(もっと読む)
測位装置
【課題】
車体の状態値の測定が精度良く行える測位装置を提供することを図る。
【解決手段】
測位用衛星からの信号に基づいて電波受信地点の測位を行う測位部6と、移動体の状態値を検出するセンサ7と、を備え、トリガ信号発生部によりトリガ信号を所定周期で発信し、前記トリガ信号をトリガとして、キャリアNCOの周波数を前記測位用衛星からの信号に同調させ、第1のトリガ信号から第2のトリガ信号までの期間における、電波受信地点の移動量を測定するとともに、第1のトリガ信号から第2のトリガ信号までの期間における、前記センサの検出する状態値の変化量を測定する。
(もっと読む)
ナビゲーション装置
【課題】
従来技術においては波形整形フィルタがチャタリングなどのように通常の走行において発生しない高周波成分を除去することを目的としているが、車輪の空転により発生するパルスは通常の走行速度範囲内であるために前記フィルタでは除去されず、全て正常なパルスとしてご認識されてしまう問題がある。
【解決手段】
ナビゲーション装置の車輪速パルスの入力回路に自動車の走行速度に対応して選ばれた特性が設定される特性可変フィルタを設け、特性可変フィルタを介して入力されるパルスに基づいて移動距離或いは移動速度を求めるようにした。
(もっと読む)
ナビゲーションシステム、及びナビゲーション方法
【課題】電車に乗車した場合、GPSを用いずとも、目的地に行けるナビゲーションの技術を提供する。
【解決手段】加速度センサBと携帯情報端末Aとを備え、前記携帯情報端末は、駅名情報と駅間距離情報とを記憶する記憶手段と、乗車駅名・下車駅名情報を入力する情報入力手段と、加速度情報入力手段と、加速度情報を基に走行速度を算出する走行速度算出手段と、算出された走行速度が零に至った位置の走行距離を算出する走行距離算出手段と、算出された走行距離情報と前記記憶手段から読み出された情報とに基づいて、走行停止状態における位置が乗車駅と下車駅との間に在る途中停車駅に該当するか否かを判断する途中停車駅判断手段と、途中停車駅であると判断された場合、下車駅の手前の駅であるか否かを判断する手前駅判断手段と、手前駅であることが判明した場合、その旨を出力する手前駅警告手段とを具備するナビゲーションシステム。
(もっと読む)
携帯型経路案内装置
【課題】 振動発生装置(振動モータ)による振動を歩行と誤検出することを防止すること。
【解決手段】 加速度センサ(SN1)の検出信号を所定のサンプリング周波数(fs)でサンプリングした加速度データをスペクトル解析するスペクトル解析手段(KC4C)と、スペクトル解析手段(KC4C)の解析により歩行特有のスペクトルである歩行スペクトルが検出されたか否かを判別してユーザの歩行を検出する歩行検出手段(KC4)と、装置発生周波数で前記携帯型経路案内装置(1)を振動させる振動発生装置(M1)と、サンプリング周波数の1/2以上且つ装置発生周波数より小さい遮断周波数を有し、加速度センサ(SN1)の検出信号から前記遮断周波数以下の検出信号を通過させるローパスフィルタ(LPF)と、を備えた携帯型経路案内装置(1)。
(もっと読む)
走行距離改竄検出システム
【課題】 走行距離の改竄を検出することができる走行距離改竄検出システムを提供する。
【解決手段】 車輪側記憶手段11f〜14fを有し所定のデータ信号を通信可能な車輪側通信手段11〜14と、車体側通信手段21〜24と、制御手段30と、走行距離検出手段40とを備え、第1の所定時期に、制御手段30は、走行距離検出手段40により検出された第1の走行距離データを車体側通信手段21〜24を介して車輪側通信手段11〜14へ送信し、車輪側通信手段11〜14は、第1の走行距離データを車輪側記憶手段11f〜14fに記憶し、第1の所定時期より遅い第2の所定時期に、制御手段30は、走行距離検出手段40により検出された第2の走行距離データと、車輪側記憶手段11f〜14fから取得した第1の走行距離データとを照合し、第1の走行距離データよりも第2の走行距離データが小さいと判定した場合に走行距離の改竄を検出する。
(もっと読む)
イメージ拡張型の慣性航行システム(IAINS)および方法
輸送手段(10)上に搭載されたイメージ拡張型の慣性航行システム(LAWS)は、航行状態ベクトルを推定するように構成された慣性航行システム(INS)と、イメージャーの視野(x,y,z)を通過する地形特徴に関連するピクセル信号を出力するように構成されたイメージャー(12)とを含む。システム(IAINS)は、慣性航行システム(INS)とイメージャー(12)とに動作可能に接続された処理装置をさらに含む。処理装置は、特徴ピクセル信号に関連する所与の画像フレームに対して、イメージャーからイメージャーの視野を通過する1つまたは複数の地形特徴の中心までの距離を感知するように構成される。処理装置はまた、地形特徴がイメージャーの視野を通過するにつれて、各地形特徴を追跡するようにも構成される。処理装置はさらに、追跡された地形特徴に関する慣性航行システム(INS)の計算されたNED(前、右、下)座標位置情報に基づき、慣性航行システム(INS)の航行状態ベクトルを更新するように構成される。 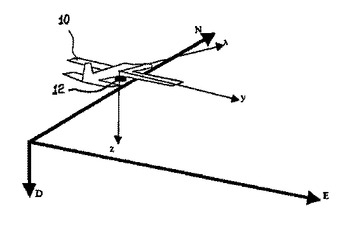 (もっと読む)
(もっと読む)
1 - 18 / 18
[ Back to top ]