
携帯型経路案内装置
【課題】 振動発生装置(振動モータ)による振動を歩行と誤検出することを防止すること。
【解決手段】 加速度センサ(SN1)の検出信号を所定のサンプリング周波数(fs)でサンプリングした加速度データをスペクトル解析するスペクトル解析手段(KC4C)と、スペクトル解析手段(KC4C)の解析により歩行特有のスペクトルである歩行スペクトルが検出されたか否かを判別してユーザの歩行を検出する歩行検出手段(KC4)と、装置発生周波数で前記携帯型経路案内装置(1)を振動させる振動発生装置(M1)と、サンプリング周波数の1/2以上且つ装置発生周波数より小さい遮断周波数を有し、加速度センサ(SN1)の検出信号から前記遮断周波数以下の検出信号を通過させるローパスフィルタ(LPF)と、を備えた携帯型経路案内装置(1)。
【解決手段】 加速度センサ(SN1)の検出信号を所定のサンプリング周波数(fs)でサンプリングした加速度データをスペクトル解析するスペクトル解析手段(KC4C)と、スペクトル解析手段(KC4C)の解析により歩行特有のスペクトルである歩行スペクトルが検出されたか否かを判別してユーザの歩行を検出する歩行検出手段(KC4)と、装置発生周波数で前記携帯型経路案内装置(1)を振動させる振動発生装置(M1)と、サンプリング周波数の1/2以上且つ装置発生周波数より小さい遮断周波数を有し、加速度センサ(SN1)の検出信号から前記遮断周波数以下の検出信号を通過させるローパスフィルタ(LPF)と、を備えた携帯型経路案内装置(1)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、経路の案内が可能な携帯電話やPDA(Personal Digital Assistance)、ノート型パーソナルコンピュータ等のユーザが携帯可能な携帯型経路案内装置に関し、特に、ユーザの歩行を検出してユーザの歩行に応じた経路案内が可能な携帯型経路案内装置に関する。
【背景技術】
【0002】
携帯型の経路案内装置において、ユーザの現在位置を検出するために、GPS(Global Positioning System:全地球無線測位システム)を利用するものが知られている。しかし、GPSを使用する場合、地下や屋内のようなGPSの電波を受信できない場所では、現在位置を検出できず、経路案内ができないという問題がある。
この問題を解決するために、携帯型の経路案内装置において、使用者の歩行を検出して移動距離を求め、現在位置を検出しようとすることが考えられる。歩行を検出する方法として、携帯型の経路案内装置に以下の公知技術を適用することが考えられる。
【0003】
(特許文献1(特開2002−191580号公報)記載の技術)
特許文献1には、加速度を検出する加速度センサを備え、加速度センサの出力をサンプリングして、フーリエ変換により歩行特有のスペクトル(2Hz程度)を検出することにより歩行を検出する歩数計に関する技術が記載されている。
(特許文献2(特開2002−197437号公報)記載の技術)
特許文献2には、マイクでとらえた音響データにローパスフィルタをかけて、歩行時に発生する特有の低周波音を検出することにより歩行を検出する歩行検出装置に関する技術が記載されている。
【0004】
【特許文献1】特開2002−191580号公報(段落番号「0050」〜「0057」)
【特許文献2】特開2002−197437号公報(段落番号「0018」〜「0022」)
【発明の開示】
【発明が解決しようとする課題】
【0005】
(従来技術の問題点)
しかしながら、前記特許文献2記載の技術を携帯電話等の携帯型経路案内装置で実施することを考えた場合、マイクの周波数特性が、歩行特有の低周波音を検出するために必要な低域までカバーしていなかったり、外部の音の影響が少なからずあるという問題がある。
したがって、特許文献1記載の技術のように、加速度をサンプリングしてフーリエ変換によって歩行特有のスペクトルを検出する方が確実な歩行検出が行うことができるものと考えられる。
しかし、本出願の発明者による研究の結果、携帯電話で既に実施されている歩行ナビゲーションシステム(経路案内システム)に、特許文献1記載の歩行検出手段を適用すると問題があることがわかった。
【0006】
携帯電話には、電話の着信をユーザに知らせるために携帯電話を振動させるバイブレーション機能が搭載されている。また、歩行ナビゲーションにおいても、ガイダンスポイント(交差点や案内経路の曲がり角等)をバイブレーションによりユーザに告知する機能がある。このバイブレーション機能による振動は、携帯電話に搭載された振動モータ(振動発生装置)により発生しているが、概ね5000〜10000rpmの回転数の前記振動モータが使用されている。前記回転数を周波数(振動数)に直すと、83〜167Hz程度である。
一方、検出すべき歩行特有の振動数(周波数)は、特許文献1に記載されているように、2Hz程度である。したがって、加速度のサンプリング周波数は、サンプリング定理から、2Hzの2倍の4Hz以上であれば歩行の検出が可能である。しかし、ゆっくり歩行した場合や、小走りで歩行した場合には、2Hzの前後(例えば、1.5Hzや4Hz)に歩行の周波数が検出されるため、これらも考慮してサンプリング周波数を設定する必要がある。しかし、必要以上にサンプリング周波数を大きくすると、データ量が増えるため、携帯電話の付帯機能としてはリソースが不足してしまう問題がある。したがって、実際には、8Hz〜64Hz程度のサンプリング周波数でサンプリングを行えば十分である。
【0007】
しかし、本発明者の研究の結果、前記周波数の振動モータを搭載し、前記サンプリング周波数でサンプリングする携帯電話において、加速度のサンプリング中に振動モータがオンになり、バイブレーションが発生すると、振動モータにより発生したバイブレーションが加速度のサンプリングに悪影響を与えることが判明した。例えば、サンプリング周波数を64Hzである場合、振動モータの振動数はサンプリングのナイキスト周波数(サンプリング周波数の1/2の周波数)32Hzより高いので、加速度のサンプリングデータには、エイリアス(ナイキスト周波数以上の周波数成分が虚像として現れる現象)が発生する。前記エイリアスは、加速度のサンプリング周波数がバイブレーションの振動数(振動モータの振動数)に対して低すぎるために発生する。バイブレーションによるエイリアスを防止するためには、ナイキスト周波数をバイブレーションの振動数よりも高い値に設定すればよい。しかしながら、ナイキスト周波数をバイブレーションの振動数よりも高くすると、サンプリング周波数が400Hz近くになってしまい、データ量が膨大になるため、実現は困難である。
【0008】
次に、前記エイリアスが歩行検出に悪影響を及ぼす具体例を説明する。
3軸の加速度センサと、回転数が7800rpm、即ち、振動数が130Hzの振動モータとを備え、サンプリング周波数が64Hzである携帯電話において、振動モータを振動させた場合を例に取る。
【0009】
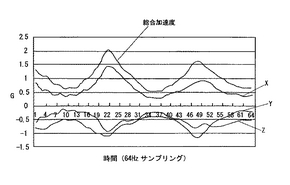
図20は3軸加速度センサと、回転数が7800rpmの振動モータを備え、サンプリング周波数が64Hzである携帯電話において、振動モータを振動させた場合のサンプリング結果の説明図である。
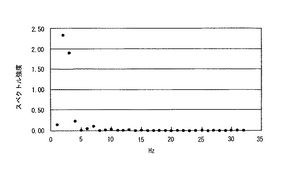
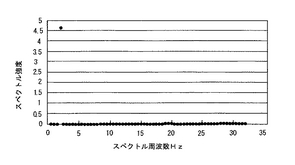
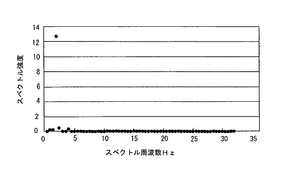
図21は図20のサンプリング結果を高速フーリエ変換して得られたスペクトルの説明図である。
図22はユーザが歩行中に3次元加速度センサの出力信号をサンプリング周波数が64Hzでサンプリングした結果を高速フーリエ変換して得られたスペクトル解析結果の説明図である。
なお、図20において、縦軸の加速度の値は、3軸の加速度センサの各軸の検出結果の二乗和の平方根の値であり、総合的な加速度(加速度の大きさ)を示している。
【0010】
図20,図21において、振動モータは130Hzで振動しているので、実際には130Hzのサイン波が発生しているが、サンプリング周波数が64Hzなので、エイリアスが発生して、図20に示す波形が観測される。したがって、図20に示す観測データを高速フーリエ変換してスペクトルを求めると、図21に示すように2Hzにピークを持ったスペクトルが観測されてしまう。一方、図22に示すように、歩行時に検出される振動のスペクトルは2Hz程度であるため、このままでは歩行による振動と、振動モータによる振動との区別がつかない。したがって、例えば、携帯電話を携帯したユーザが立ち止まっている時に着信があった場合や、ガイダンスポイントである交差点で信号待ち等により停止した場合に、バイブレーションがオンになると誤って歩行と検出してしまい、現在位置の検出を誤るといった問題が発生する。
【0011】
本発明は、前述の事情に鑑み、振動発生装置(振動モータ)による振動を、歩行と誤検出することを防止することを技術的課題とする。
【課題を解決するための手段】
【0012】
次に、前記課題を解決した本発明を説明するが、本発明の要素には、後述の実施の形態の具体例(実施例)の要素との対応を容易にするため、実施例の要素の符号をカッコで囲んだものを付記する。また、本発明を後述の実施例の符号と対応させて説明する理由は、本発明の理解を容易にするためであり、本発明の範囲を実施例に限定するためではない。
【0013】
(本発明)
(第1発明)
前記技術的課題を解決するために第1発明の携帯型経路案内装置(1)は、
出発地から目的地までの経路を案内する経路案内画像(24)を表示する表示画面(11)と、
携帯型経路案内装置(1)の加速度を検出する加速度センサ(SN1)と、
前記加速度センサ(SN1)の検出信号を所定のサンプリング周波数(fs)でサンプリングした加速度データを記憶する加速度データ記憶手段(KC4A)と、
前記加速度データ記憶手段(KC4A)に記憶された前記加速度データをスペクトル解析するスペクトル解析手段(KC4C)と、
前記スペクトル解析手段(KC4C)の解析により歩行特有のスペクトルである歩行スペクトル(fw)が検出されたか否かを判別することにより前記携帯型経路案内装置(1)を携帯したユーザの歩行を検出する歩行検出手段(KC4)と、
前記歩行検出手段(KC4)の検出結果に応じて、前記経路案内画像(24)を作成する案内画像作成手段(KC17)と、
装置発生周波数(fv)で前記携帯型経路案内装置(1)を振動させる振動発生装置(M1)と、
前記サンプリング周波数(fs)の1/2以上且つ前記装置発生周波数(fv)より小さい遮断周波数(fco)を有し、前記加速度センサ(SN1)の検出信号から前記遮断周波数(fco)以下の検出信号を通過させるローパスフィルタ(LPF)と、
を備えたことを特徴とする。
【0014】
(第1発明の作用)
前記構成要件を備えた第1発明の携帯型経路案内装置(1)では、振動発生装置(M1)は、遮断周波数(fco)より大きな装置発生周波数(fv)で携帯型経路案内装置(1)を振動させる。前記サンプリング周波数(fs)の1/2以上の遮断周波数(fco)を有するローパスフィルタ(LPF)は、前記加速度センサ(SN1)の検出信号から前記遮断周波数(fco)以下の検出信号を通過させる。
したがって、第1発明の携帯型経路案内装置(1)は、ローパスフィルタ(LPF)により、装置発生周波数(fv)の振動が遮断された後、前記サンプリング周波数(fs)でサンプリングされる。この結果、サンプリングされた加速度データには、装置発生周波数(fv)の振動がエイリアスにより検出されることが防止されるので、振動発生装置(M1)による振動を歩行と誤検出することが防止される。
【0015】
(第2発明)
前記技術的課題を解決するために第2発明の携帯型経路案内装置(1)は、
出発地から目的地までの経路を案内する経路案内画像(24)を表示する表示画面(11)と、
携帯型経路案内装置(1)の加速度を検出する加速度センサ(SN1)と、
前記加速度センサ(SN1)の検出信号を所定のサンプリング周波数(fs)でサンプリングした加速度データを記憶する加速度データ記憶手段(KC4A)と、
前記加速度データ記憶手段(KC4A)に記憶された前記加速度データをスペクトル解析するスペクトル解析手段(KC4C)と、
前記スペクトル解析手段(KC4C)の解析により歩行特有のスペクトルである歩行スペクトル(fw)が検出されたか否かを判別することにより前記携帯型経路案内装置(1)を携帯したユーザの歩行を検出する歩行検出手段(KC4)と、
前記歩行検出手段(KC4)の検出結果に応じて、前記経路案内画像(24)を作成する案内画像作成手段(KC17)と、
前記携帯型経路案内装置(1)を振動させる振動発生装置(M1)と、
前記サンプリング周波数(fs)をfs、前記振動発生装置(M1)が発生する装置発生周波数(fv)をfv、前記歩行スペクトル(fw)をfwとし、mを整数とした場合に、|fs×m−fv|≠fwとなるように設定された前記サンプリング周波数(fs)および前記装置発生周波数(fv)と、
を備えたことを特徴とする。
【0016】
(第2発明の作用)
前記構成要件を備えた第2発明の携帯型経路案内装置(1)では、前記サンプリング周波数(fs)および前記装置発生周波数(fv)が、前記サンプリング周波数(fs)をfs、前記振動発生装置(M1)が発生する装置発生周波数(fv)をfv、前記歩行スペクトル(fw)をfwとし、mを整数とした場合に、|fs×m−fv|≠fwとなるように設定されている。
したがって、第2発明の携帯型経路案内装置(1)は、|fs×m−fv|≠fwとなるようにサンプリング周波数(fs)および前記装置発生周波数(fv)が設定されているので、振動発生装置(M1)が振動しても、エイリアスにより装置発生周波数(fv)fvが歩行スペクトル(fw)fwとして検出されない。この結果、振動発生装置(M1)による振動を歩行と誤検出することが防止される。
【0017】
(第3発明)
前記技術的課題を解決するために第3発明の携帯型経路案内装置(1)は、
出発地から目的地までの経路を案内する経路案内画像(24)を表示する表示画面(11)と、
携帯型経路案内装置(1)の加速度を検出する加速度センサ(SN1)と、
前記加速度センサ(SN1)の検出信号を第1サンプリング周波数(fs1)でサンプリングした第1サンプリング加速度データを記憶する第1サンプリング加速度データ記憶手段(KC4A1)と、
前記第1サンプリング周波数(fs1)とは異なる第2サンプリング周波数(fs2)で前記加速度センサ(SN1)の検出信号をサンプリングした第2サンプリング加速度データを記憶する第2サンプリング加速度データ記憶手段(KC4A2)と、
前記第1サンプリング加速度データおよび前記第2サンプリング加速度データをスペクトル解析するスペクトル解析手段(KC4C″)と、
前記スペクトル解析手段(KC4C″)による前記第1サンプリング加速度データの解析により歩行特有のスペクトルである歩行スペクトル(fw)が検出され且つ、前記スペクトル解析手段(KC4C″)による前記第2サンプリング加速度データの解析により前記歩行スペクトル(fw)が検出された場合に、前記携帯型経路案内装置(1)を携帯したユーザの歩行が歩行したものと判別する歩行検出手段(KC4″)と、
前記歩行検出手段(KC4″)の検出結果に応じて、前記経路案内画像(24)を作成する案内画像作成手段(KC17)と、
前記携帯型経路案内装置(1)を振動させる振動発生装置(M1)と、
を備えたことを特徴とする。
【0018】
特に、第3発明の携帯型経路案内装置(1)では、前記第1サンプリング周波数(fs1)および前記第2サンプリング周波数(fs2)は、一方のサンプリング周波数と他方のサンプリング周波数とが互いに整数倍ではない値に設定することができる。
【0019】
(第3発明の作用)
前記構成要件を備えた第3発明の携帯型経路案内装置(1)では、第1サンプリング加速度データ記憶手段(KC4A1)は、前記加速度センサ(SN1)の検出信号を第1サンプリング周波数(fs1)でサンプリングした第1サンプリング加速度データを記憶する。第2サンプリング加速度データ記憶手段(KC4A2)は、前記第1サンプリング周波数(fs1)とは異なる第2サンプリング周波数(fs2)で前記加速度センサ(SN1)の検出信号をサンプリングした第2サンプリング加速度データを記憶する。歩行検出手段(KC4″)は、スペクトル解析手段(KC4C″)による前記第1サンプリング加速度データの解析により歩行特有のスペクトルである歩行スペクトル(fw)が検出され且つ、前記スペクトル解析手段(KC4C″)による前記第2サンプリング加速度データの解析により前記歩行スペクトル(fw)が検出された場合に、前記携帯型経路案内装置(1)を携帯したユーザの歩行が歩行したものと判別する。
【0020】
したがって、第3発明の携帯型経路案内装置(1)では、例えば、エイリアスにより第1サンプリング加速度データの解析で振動発生装置(M1)の振動が歩行スペクトル(fw)として検出されても、第1サンプリング周波数(fs1)とは異なる第2サンプリング周波数(fs2)でサンプリングされた第2サンプリング加速度データの解析では歩行スペクトル(fw)が検出されない。逆に、エイリアスにより第2サンプリング加速度データの解析で振動発生装置(M1)の振動が歩行スペクトル(fw)として検出されても、第2サンプリング周波数(fs2)とは異なる第1サンプリング周波数(fs1)でサンプリングされた第1サンプリング加速度データの解析では歩行スペクトル(fw)が検出されない。この結果、振動発生装置(M1)による振動を歩行と誤検出することが防止される。
【0021】
(第4発明)
前記技術的課題を解決するために第4発明の携帯型経路案内装置(1)は、
出発地から目的地までの経路を案内する経路案内画像(24)を表示する表示画面(11)と、
携帯型経路案内装置(1)の加速度を検出する加速度センサ(SN1)と、
前記加速度センサ(SN1)の検出信号に基づいて携帯型経路案内装置(1)を携帯したユーザの歩行を検出する歩行検出手段(KC4)と、
前記歩行検出手段(KC4)の検出結果に応じて、前記経路案内画像(24)を作成する案内画像作成手段(KC17)と、
前記ユーザが歩行時に前記加速度センサ(SN1)で検出される歩行時周波数(fw)よりも大きな装置発生周波数(fv)で携帯型経路案内装置(1)を振動させる振動発生装置(M1)と、
前記加速度センサ(SN1)の検出信号から前記装置発生周波数(fv)の検出信号を遮断し且つ前記歩行時周波数(fw)の検出信号を通過させる周波数遮断装置(LPF)と、
を備えたことを特徴とする。
【0022】
(第4発明の作用)
前記構成要件を備えた第4発明の携帯型経路案内装置(1)では、振動発生装置(M1)は、前記ユーザが歩行時に前記加速度センサで検出される歩行時周波数(fw)よりも大きな装置発生周波数(fv)で携帯型経路案内装置(1)を振動させる。周波数遮断装置(LPF)は、前記加速度センサ(SN1)の検出信号から前記装置発生周波数(fv)の検出信号を遮断し且つ前記歩行時周波数(fw)の検出信号を通過させる。したがって、第4発明の携帯型経路案内装置(1)は、周波数遮断装置(LPF)により、装置発生周波数(fv)の振動が遮断された後、歩行時周波数(fw)に基づいて歩行の検出が行われる。この結果、第4発明の携帯型経路案内装置(1)では、装置発生周波数(fv)の振動がエイリアスにより検出されることが防止されるので、振動発生装置(M1)による振動を歩行と誤検出することが防止される。
【発明の効果】
【0023】
前述の本発明は、振動発生装置(振動モータ)による振動を、歩行と誤検出することを防止できる。
【発明を実施するための最良の形態】
【0024】
次に図面を参照しながら、本発明の実施の形態の具体例(実施例)を説明するが、本発明は以下の実施例に限定されるものではない。
【実施例1】
【0025】
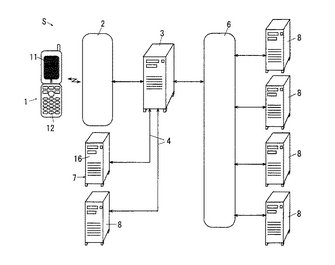
図1は、本発明の携帯ナビゲーションシステムの実施例1の説明図である。
図1において、実施例1の携帯ナビゲーションシステムSは、ユーザが携帯可能な携帯端末としての携帯電話(携帯型経路案内装置)1を有する。前記携帯電話1は、携帯電話ネットワーク2を介して携帯電話事業者のデータ通信装置3と接続している。そして、前記データ通信装置3は、専用線4やインターネット6を介して、携帯ナビゲーション用データ配信サーバ(路線情報配信サーバ)7やその他の情報配信業者(コンテンツプロバイダ、アプリケーションサービスプロバイダ)の情報配信サーバ8に接続されている。なお、実施例1では、携帯ナビゲーション用データ配信サーバ7は、専用線4を介してデータ通信装置3に接続されているが、インターネット6を介して接続することも可能である。
【0026】
前記携帯電話1は、表示画像が表示される情報表示画面(表示器)11や、ユーザが各種入力を行う入力キー12を有し、内部にプログラム等が記録された記憶装置(記録媒体)を備えている。実施例1の携帯電話1は、携帯電話の現在位置を三次元側位可能なGPS(Global Positioning System、全地球無線側位システム)装置を内蔵している。
また、前記携帯ナビゲーション用データ配信サーバ7も、サーバ本体16及びディスプレイ(図示せず)、キーボードやマウス等の入力装置(図示せず)、ハードディスクドライブ(記録媒体、図示せず)、CDドライブ等の光学ドライブ(記録媒体読み取り装置、図示せず)等を有している。
【0027】
(携帯電話1の制御部の説明)
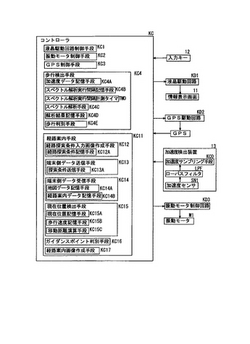
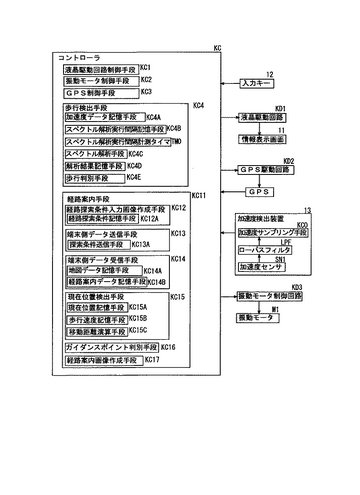
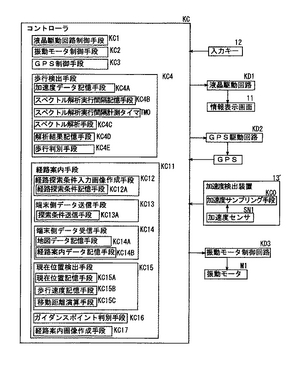
図2は前記図1に示す携帯ナビゲーションシステムの携帯端末の機能をブロック図(機能ブロック図)で示した図である。
図2において、携帯電話1のコントローラKCは、外部との信号の入出力および入出力信号レベルの調節等を行うI/O(入出力インターフェース)、必要な処理を行うためのプログラムおよびデータ等が記憶されたROM(リードオンリーメモリ、記録媒体)、必要なデータを一時的に記憶するためのRAM(ランダムアクセスメモリ、記録媒体)、ROM等に記憶されたプログラムに応じた処理を行うCPU(中央演算処理装置)、ならびにクロック発振器等を有するマイクロコンピュータにより構成されており、前記ROM等に記憶されたプログラムを実行することにより種々の機能を実現することができる。
【0028】
(携帯電話のコントローラKCに接続された信号入力要素)
前記携帯電話1のコントローラKCは、前記入力キー12やGPS装置、加速度検出装置13、その他の信号入力要素からの信号が入力されている。
前記入力キー12は、ユーザにより入力された入力信号を検出して、その検出信号をコントローラKCに入力する。
前記GPS装置は、側位開始の入力信号に応じて、衛星から発射された時刻信号の電波の到達時間等から地球上の携帯電話1の位置を側位し、側位結果をコントローラKCに入力する。
【0029】
前記加速度検出装置13は、加速度センサSN1と、ローパスフィルタ(周波数遮断装置)LPFと、加速度サンプリング手段KC0とを有している。
前記加速度センサSN1は、携帯電話1の移動時の加速度(ユーザ歩行時には歩行に伴う体動による振動等)を検出する。実施例1の加速度センサSN1は、携帯電話1に対して固定された直交する所定の3軸(X,Y,Z軸)方向の加速度を検出する。なお、前記直交する3軸方向の加速度を検出可能な3次元加速度センサは、従来公知(例えば、特許第3359781号明細書等参照)であり、種々のセンサを使用できるので、詳細な説明は省略する。
【0030】
前記ローパスフィルタLPFは、予め設定された遮断周波数(カットオフ周波数)fcoを有し、前記加速度センサから出力された検出信号から、遮断周波数以下の検出信号を通過させ、遮断周波数以上の検出信号を遮断(減衰)させる。なお、実施例1のローパスフィルタLPFは、前記遮断周波数fcoが32Hzに設定されている。
前記加速度サンプリング手段KC0は、前記ローパスフィルタLPFを通過した検出信号を、予め設定されたサンプリング周波数fsでサンプリング(アナログ−デジタル変換)する。なお、実施例1の加速度サンプリング手段KC0は、サンプリング周波数fsが64Hzに設定されている。即ち、実施例1の携帯電話1では、ローパスフィルタLPFの遮断周波数fcoが、サンプリング周波数fsの1/2(即ち、ナイキスト周波数)に設定されている。
【0031】
(携帯電話のコントローラKCに接続された制御要素)
また、携帯電話1のコントローラKCは、液晶駆動回路KD1、スピーカ駆動回路KD2、振動モータ制御回路(振動発生装置制御回路)KD3や図示しない電源回路、その他の制御要素に接続されており、それらの作動制御信号を出力している。
前記液晶駆動回路KD1は、液晶表示パネルの表示用電極のオン・オフを制御して情報表示画面11に表示画像を表示する。
前記GPS駆動回路KD2は、前記GPS装置に側位開始の信号を出力してGPS装置を駆動する。
振動モータ制御回路KD3は、電話の着信時や経路案内中にガイダンスポイントに到着する場合等に、振動モータ(振動発生装置)M1を所定の装置発生周波数(バイブレーション周波数)fvで作動させて、携帯電話1を振動させ、ユーザに告知する。なお、実施例1の振動モータ制御回路KD3は、前記振動モータM1が130Hz(装置発生周波数fv)で振動するように制御する。即ち、実施例1の携帯電話1では、装置発生周波数fv(=130Hz)が遮断周波数fco(32Hz)より大きな値に設定されている。
【0032】
(携帯電話のコントローラKCの機能)
携帯電話1のコントローラKCは、前記各信号出力要素からの出力信号に応じた処理を実行して、前記各制御要素に制御信号を出力する機能(制御手段)を有している。前記コントローラKCの機能(制御手段)を次に説明する。
KC1:液晶駆動回路制御手段(経路案内画像表示手段)
液晶駆動回路制御手段KC1は、液晶駆動回路KD1を制御して、情報表示画面11に画像を表示する。
KC2:振動モータ制御手段(振動発生装置制御手段)
振動モータ制御手段KC2は、振動モータ制御回路KD3を介して振動モータM1の駆動を制御する。
KC3:GPS制御手段
GPS制御手段KC3は、前記GPS駆動回路KD2を介してGPS装置を駆動する。
【0033】
KC4:歩行検出手段(歩行検出プログラム)
歩行検出手段KC4は、加速度データ記憶手段KC4Aと、スペクトル解析実行間隔記憶手段KC4B″と、スペクトル解析実行間隔計測タイマTM0と、スペクトル解析手段KC4Cと、解析結果記憶手段KC4Dと、歩行判別手段KC4Eとを有し、前記加速度検出装置13から出力される検出信号に基づいて、携帯電話1を携帯したユーザの歩行を検出する。
KC4A:加速度データ記憶手段
加速度データ記憶手段KC4Aは、前記加速度検出装置13の加速度サンプリング手段KC0でサンプリングされた加速度データを読取り、記憶する。なお、実施例1の加速度データ記憶手段KC4Aは、0.5秒間分の加速度データ、即ち、64Hzのサンプリング周波数でサンプリングされた加速度データを32個記憶可能に構成され、最新の加速度データを読取ると、最も古い加速度データを消去して最新の加速度データを記憶する。
【0034】
KC4B:スペクトル解析実行間隔記憶手段
スペクトル解析実行間隔記憶手段KC4Bは、スペクトル解析を実行する間隔であるスペクトル解析実行間隔t0を記憶する。実施例1のスペクトル解析実行間隔記憶手段KC4Bは、スペクトル解析実行間隔t0として、0.5秒を記憶している。
TM0:スペクトル解析実行間隔計測タイマ
スペクトル解析実行間隔計測タイマTM0は、前記スペクトル解析実行間隔t0がセットされ、スペクトル解析実行間隔t0が経過するとタイムアップする。
【0035】
KC4C:スペクトル解析手段
スペクトル解析手段KC4Cは、前記加速度データ記憶手段KC4Aに記憶された加速度データに基づいて、加速度の大きさ(総合加速度)を演算した後、高速フーリエ変換(FFT:Fast Fourier Transform)によりスペクトル(パワースペクトル)の解析を行う。なお、実施例1の高速フーリエ変換KC4Cは、1Hz〜32Hzの範囲で1Hz毎にスペクトル強度を求める。なお、FFTは2n個のデータが必要であるが、実施例1では32個(25個)の加速度データに基づいて、FFTを行う。
KC4D:解析結果記憶手段
解析結果記憶手段KC4Dは、前記高速フーリエ変換KC4Cでのスペクトル解析の結果を記憶する。
【0036】
KC4E:歩行判別手段
歩行判別手段KC4Eは、前記解析結果記憶手段KC4Dに記憶されたスペクトル解析の結果から、歩行特有のスペクトルである歩行スペクトル(歩行時周波数)fwが検出されたか否かの判別を行う。実施例1の歩行判別手段KC4Eは、スペクトル解析の結果、1Hz〜4Hzの間にスペクトル強度がスペクトル強度閾値Ns(実施例1ではNs=1.0)以上のものが計測された場合に歩行と判別する。
KC11:経路案内手段(経路案内プログラム)
経路案内手段KC11は、経路探索条件入力画像作成手段KC12と、端末側データ送信手段KC13と、端末側データ受信手段KC14と、現在位置検出手段KC15と、ガイダンスポイント判別手段KC16と、経路案内画像作成手段KC17と、を有し、GPSからの信号や歩行の検出等に応じて、情報表示画面11に経路案内画像等を表示して経路の案内を行う。
【0037】
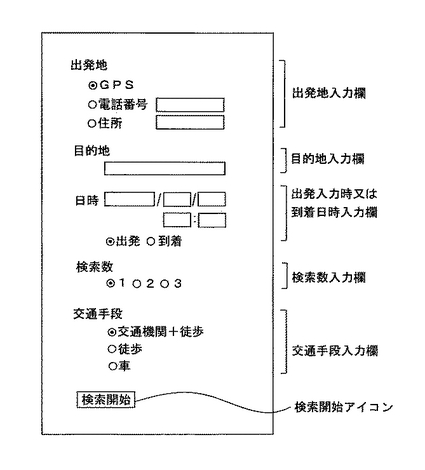
図3は実施例1の経路探索条件画像の説明図である。
KC12:経路探索条件入力画像作成手段
経路検索条件入力画像作成手段KC12は、経路検索条件記憶手段KC12Aを有し、情報表示画面11に出発地及び目的地を含む経路探索条件を入力するための経路検索条件入力画像(図3参照)を作成し、情報表示画面11に表示する。図3において、実施例1の経路検索条件入力画像には、出発地を入力するための出発地入力欄、目的地を入力するための目的地入力欄、経路案内の出発日時または到着日時を入力するための日時入力欄、検索する経路の数を入力するための検索経路入力欄、経路案内時に利用する交通手段を入力するための交通手段入力欄、および、サーバ7へ検索条件の送信を実行するための検索条件送信アイコンが表示されている。
【0038】
KC12A:経路検索条件記憶手段
経路検索条件記憶手段KC12Aは、前記経路検索条件入力画像(図3参照)への入力により設定された経路検索条件(出発地や目的地、出発日時等)を記憶する。
KC13:端末側データ送信手段
端末側データ送信手段KC13は、探索条件送信手段KC13Aを有し、携帯電話(携帯端末)1からサーバ7へデータを送信する。
KC13A:探索条件送信手段
探索条件送信手段KC13Aは、前記経路探索条件記憶手段KC12Aに記憶された経路探索条件をサーバ7に送信する。
【0039】
KC14:端末側データ受信手段
端末側データ受信手段KC14は、地図データ記憶手段KC14Aと、経路案内データ記憶手段KC14Bとを有し、サーバ7から送信されたデータを受信し、記憶する。
KC14A:地図データ記憶手段
地図データ記憶手段KC14Aは、前記サーバ7から送信された地図データを記憶する。
KC14B:経路案内データ記憶手段
経路案内データ記憶手段KC14Bは、前記経路探索条件に応じて前記サーバ7から送信された経路案内データを記憶する。実施例1の経路案内データ記憶手段KC14Bが記憶する経路案内データには、ユーザをナビゲーションする経路のデータや、曲がり角や目的地等のガイダンスポイントのデータが含まれる。
【0040】
KC15:現在位置検出手段
現在位置検出手段KC15は、現在位置記憶手段KC15Aと、歩行速度記憶手段KC15Bと、移動距離演算手段KC15Cとを有し、GPS装置からの出力信号や歩行の判別に基づいて、携帯電話1を携帯したユーザの現在位置を検出する。
KC15A:現在位置記憶手段
現在位置記憶手段KC15Aは、携帯電話1の現在位置を記憶する。
KC15B:歩行速度記憶手段
歩行速度記憶手段KC15Bは、ユーザが歩行する場合の歩行速度を記憶する。なお、実施例1の歩行速度記憶手段KC15Bは、ユーザの歩行速度として、80m/分を記憶している。
【0041】
KC15C:移動距離演算手段
移動距離演算手段KC15Cは、歩行が検出された場合に、歩行時間(歩行の判別を行った期間、実施例1では0.5秒間)と歩行速度とに基づいて、ユーザの現在位置からの経路に沿った移動距離を演算する。
KC16:ガイダンスポイント判別手段
ガイダンスポイント判別手段KC16は、前記経路案内データ記憶手段KC14Bに記憶されたガイダンスポイントのデータに基づいて、現在位置検出手段KC15で検出された現在位置が、ガイダンスポイントであるか否かを判別する。
【0042】
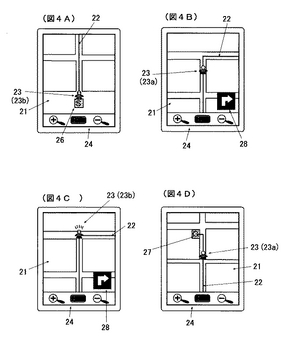
図4は経路案内画像の説明図であり、図4Aは経路案内を開始した場合の経路案内画像の説明図、図4Bは経路上を歩行している場合の経路案内画像の説明図、図4Cはガイダンスポイントで停止した場合の経路案内画像の説明図、図4Dは目的地に近づいた場合の経路案内画像の説明図である。
KC17:経路案内画像作成手段
経路案内画像作成手段KC17は、ユーザの現在位置や地図データ、経路のデータ、ガイダンスポイントであるか否かの判別データ等に基づいて、ユーザのナビゲーションを行うための経路案内画像(図4参照)を作成して、情報表示画面11に表示する。図4において、実施例1の経路案内画像作成手段KC17は、地図画像21、経路画像22および人型の現在位置表示用アイコン23を有する経路案内画像24を作成する。なお、ユーザの現在位置に応じて、出発地アイコン26(図4A参照)や目的地アイコン27(図4D参照)を経路案内画像24に追加したり、経路の曲がる方向を示す曲がり角表示アイコン28を追加する。また、ユーザの歩行が検出された場合、人型の現在位置表示用アイコン23として、歩行中であることを示す背中を向けた現在位置表示用アイコン23a(図4B、図4D参照)が表示され、ユーザの歩行が検出されていない場合(即ち、停止している場合)、停止中であることを示す正面向きの現在位置表示用アイコン23b(図4A、図4C参照)が表示される。
【0043】
(携帯ナビゲーション用データ配信サーバ7の制御部の説明)
図5は実施例1の携帯ナビゲーションシステムのサーバの機能をブロック図(機能ブロック図)で示した図である。
図5において、携帯ナビゲーション用データ配信サーバ7のコントローラSCは、外部との信号の入出力および入出力信号レベルの調節等を行うI/O(入出力インターフェース)、必要な処理を行うためのプログラムおよびデータ等が記憶されたROM(リードオンリーメモリ、ハードディスク等の記録媒体)、必要なデータを一時的に記憶するためのRAM(ランダムアクセスメモリ、記録媒体)、ROM等に記憶されたプログラムに応じた処理を行うCPU(中央演算処理装置)、ならびにクロック発振器等を有するマイクロコンピュータにより構成されており、前記ROM等に記憶されたプログラムを実行することにより種々の機能を実現することができる。
【0044】
(サーバのコントローラSCに接続された信号入力要素)
前記携帯ナビゲーション用データ配信サーバ7のコントローラSCは、キーボードやマウス等の入力装置(図示せず)やその他の信号入力要素からの信号が入力されている。
前記入力装置は、ユーザによりそれらが入力されたことを検出して、その検出信号をコントローラSCに入力する。
【0045】
(サーバのコントローラSCに接続された制御要素)
また、携帯ナビゲーション用データ配信サーバ7のコントローラSCは、ディスプレイ(図示せず)や図示しない電源回路、その他の制御要素に接続されており、それらの作動制御信号を出力している。
前記ディスプレイには、サーバの使用者の操作に応じた表示画像が表示される。
【0046】
(サーバのコントローラSCの機能)
携帯ナビゲーション用データ配信サーバ7のコントローラSCは、携帯電話1から送信された各データの処理を行う携帯ナビゲーション用アプリケーションプログラムAP4や、その他のプログラム等を有しており、前記各信号出力要素等からの出力信号に応じた処理を実行して、前記各制御要素等に制御信号を出力する機能(制御手段)を有している。次に、前記コントローラSCの携帯ナビゲーション用アプリケーションプログラムAP4の機能(制御手段)を説明する。
【0047】
SC1:サーバ側データ受信手段
サーバ側データ受信手段SC1は、探索条件受信手段SC1Aを有し、携帯電話1から送信されたデータを受信する。
SC1A:探索条件受信手段
探索条件受信手段SC1Aは、携帯電話1から送信された前記探索条件データを受信し、記憶する。
SC2:地図データ記憶手段
地図データ記憶手段SC2は、地図データを記憶する。実施例1の地図データ記憶手段SC2に記憶された地図データは、緯度・経度に基づいて所定の範囲の単位地図に分割した単位地図データにより構成されている。なお、地図を単位地図に分割し、必要な単位地図データを送受信する技術は従来公知(例えば、特開2003−214860号公報等参照)であるので、詳細な説明は省略する。また、実施例1の地図データは、道路や通路等がベクターデータで構成されたベクタ地図データが使用されている。
【0048】
SC3:経路探索手段
経路探索手段SC3は、ガイダンスポイント抽出手段SC3Aを有し、受信した前記経路探索条件に応じて、前記出発地を出発してから前記目的地に到着するまでの経路を決定(探索)し、前記出発地の位置を示す出発地位置データと、前記目的地の位置を示す目的地位置データとを含む最適な経路のデータ(経路データ)を作成する。なお、経路検索条件において、交通機関を利用することが指定されている場合、交通機関を含めた最適経路が作成され、検索する経路の数が複数指定されている場合には、指定された数に応じた複数の経路を作成する。なお、前記最適経路を作成する技術は、従来公知であるので(例えば、特開2003−214860号公報等参照)、詳細な説明は省略する。
SC3A:ガイダンスポイント抽出手段
ガイダンスポイント抽出手段SC3Aは、経路探索手段で探索された各経路上において、曲がり角や目的地のようなガイダンスを行うポイント(ガイダンスポイント)を抽出する(検索し、設定する)。なお、前記ガイダンスポイントを抽出する技術は、例えば、本出願人の先願である特願2003−369314号記載の技術等を採用することができるので、詳細な説明は省略する。
【0049】
SC4:サーバ側データ送信手段
サーバ側データ送信手段SC4は、経路データ送信手段SC4Aと、地図データ送信手段SC4Bとを有し、携帯電話1にデータを送信する。
SC4A:経路案内データ送信手段
経路案内データ送信手段SC4Aは、前記経路探索手段SC4により探索された経路データやガイダンスポイントのデータを含む経路案内データを携帯電話1に送信する。
SC4B:地図データ送信手段
地図データ送信手段SC4Bは、前記経路探索手段SC4により探索された経路上の地図データを携帯電話1に送信する。
【0050】
(フローチャートの説明)
(サーバのフローチャートの説明)
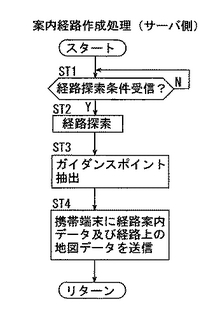
図6は実施例1の携帯ナビゲーションシステムのサーバの案内経路作成処理のメインフローチャートである。
図6のフローチャートの各ST(ステップ)の処理は、サーバ7のコントローラSCのROM等に記憶された携帯ナビゲーション用プログラムAP4に従って行われる。また、この処理はサーバ7の他の各種処理と並行して実行される。
【0051】
図6に示すフローチャートは携帯ナビゲーション用データ配信サーバ7の電源オンにより開始される。
図6のST1において、携帯電話1から送信された経路探索条件のデータを受信したか否かを判別する。イエス(Y)の場合はST2に移り、ノー(N)の場合はST1を繰り返す。
ST2において、前記経路探索条件に応じた経路の探索を行う。そして、ST3に移る。
ST3において、前記探索された経路上のガイダンスポイントを抽出する。そして。ST4に移る。
ST4において、携帯電話(携帯端末)1に経路データ、ガイダンスポイントのデータおよび経路上の地図データを送信する。そして、ST1に戻る。
【0052】
(携帯端末のフローチャートの説明)
(経路案内処理のフローチャートの説明)
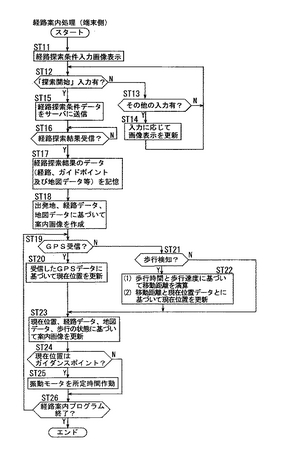
図7は実施例1の携帯ナビゲーションシステムの携帯電話が備えている経路案内処理のフローチャートである。
図7のフローチャートの各ST(ステップ)の処理は、前記コントローラKCのROM等に記憶されたプログラムに従って行われる。また、この処理は携帯電話1の他の各種処理と並行して実行される。
図7に示す経路案内処理のフローチャートは、ナビゲーションプログラム(経路案内プログラム)の起動により開始される。
【0053】
図7のST11において、情報表示画面11に経路探索条件入力画像(図3参照)を表示する。そして、ST12に移る。
ST12において、経路探索条件入力画像の「探索開始」の探索条件送信アイコンを選択する入力がされたか否かを判別する。ノー(N)の場合はST13に移り、イエス(Y)の場合はST15に移る。
ST13において、そのほかの入力、即ち、図3に示す経路探索条件入力画像の各入力欄(目的地等)への入力があったか否かを判別する。イエス(Y)の場合はST14に移り、ノー(N)の場合はST12に戻る。
ST14において、前記ST13でのユーザの入力に応じて図3に示す経路探索条件入力画像を更新する。そしてST12に戻る。
【0054】
ST15において、ユーザが入力した経路探索条件のデータを経路案内データ配信サーバ7に送信する。そして、ST16に移る。
ST16において、経路探索結果である経路案内データ(経路データおよびガイダンスポイントのデータ)や、地図データを受信したか否かを判別する。イエス(Y)の場合はST17に移り、ノー(N)の場合はST16を繰り返す。
ST17において、受信した経路探索結果の経路案内データおよび地図データを記憶する。そして、ST18に移る。
ST18において、出発地、経路データおよび地図データに基づいて、経路案内画像(図4A参照)を作成する。そして、ST19に移る。
【0055】
ST19において、GPS装置からの出力信号を受信したか否かを判別する。イエス(Y)の場合はST20に移り、ノー(N)の場合はST21に移る。
ST20において、受信したGPSの出力信号(データ)に基づいて、現在位置を更新する。そして、ST23に移る。
ST21において、ユーザの歩行が検出されたか否かを判別する。イエス(Y)の場合はST22に移り、ノー(N)の場合はST23に移る。
ST22において、次の処理(1)、(2)を実行して、ST23移る。
(1)歩行時間(スペクトル解析(歩行の検知)を行った期間、実施例1では0.5秒間)と、歩行速度とに基づいて、移動距離を演算する。
(2)演算した移動距離と、歩行前の現在位置とに基づいて、現在位置を更新する。
【0056】
ST23において、現在位置のデータ、経路データ、地図データ、歩行の状態(歩行中か、停止中か)に基づいて、経路案内画像(図4参照)を更新する。そして、ST24に移る。
ST24において、現在位置のデータと、ガイダンスポイントのデータとに基づいて、現在位置がガイダンスポイントであるか否かを判別する。イエス(Y)の場合はST25に移り、ノー(N)の場合はST26に移る。
ST25において、振動モータM1を所定時間作動させて、ガイダンスポイントに到達したことをユーザに告知する。そして、ST26に移る。
ST26において、ナビゲーションプログラム(経路案内プログラム)が終了する入力がされたか否かを判別する。ノー(N)の場合はST19に戻り、イエス(Y)の場合は図7の経路案内処理を終了する。
【0057】
(歩行検知処理のフローチャートの説明)
図8は実施例1の携帯ナビゲーションシステムの携帯電話が備えている歩行検知処理のフローチャートである。
図8のフローチャートの各ST(ステップ)の処理は、前記コントローラKCのROM等に記憶されたプログラムに従って行われる。また、この処理は携帯電話1の他の各種処理(前記経路案内処理等)と並行して実行される。
図8に示すフローチャートは、ナビゲーションプログラム(経路案内プログラム)の起動により開始される。
【0058】
図8のST31において、加速度検出装置13から出力された加速度データの読取り、記憶を開始する。そして、ST32に移る。
ST32において、スペクトル解析実行間隔計測タイマTM0にスペクトル解析実行間隔t0をセットする。そして、ST33に移る。
ST33において、スペクトル解析実行間隔計測タイマTM0がタイムアップしたか否かを判別する。ノー(N)の場合はST33を繰り返し、イエス(Y)の場合はST34に移る。
ST34において、記憶されている加速度データに基づいて、加速度の大きさを演算した後、高速フーリエ変換(FFT)によりスペクトル解析を行う。そして、ST35に移る。
【0059】
ST35において、FFTの解析結果から、1Hz〜4Hzの範囲内に、スペクトル強度閾値Ns以上のスペクトル強度を持つスペクトルが検出されたか否かを判別する。イエス(Y)の場合はST36に移り、ノー(N)の場合はST37に移る。
ST36において、ユーザが歩行したものと判別する。即ち、歩行を検知する。そして、ST38に移る。
ST37において、ユーザが歩行をしていない、即ち、停止していると判別する。そして、ST38に移る。
ST38において、ナビゲーションプログラム(経路案内プログラム)が終了する入力がされたか否かを判別する。ノー(N)の場合はST32に戻り、イエス(Y)の場合は図8の歩行検知処理を終了する。
【0060】
(実施例1の作用)
図9は実施例1の携帯端末を携帯したユーザが歩行中に携帯電話で計測された加速度データの一例の説明図であり、縦軸に加速度の値、横軸に時間をとった説明図である。
図10は図9の加速度データのスペクトル解析結果を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
図9、図10において、前記構成を備えた実施例1の携帯ナビゲーションシステムSでは、携帯電話1を携帯したユーザが歩行すると、3軸の加速度センサSN1により、X軸、Y軸、Z軸の3軸方向に周期的な加速度が検出される。前記加速度センサSN1で検出された周期的な加速度のデータは、ローパスフィルタLPFを通過する際に32Hzより大きな周波数の加速度データが遮断され、64Hzのサンプリング周波数でサンプリングされる(図9参照)。そして、前記3軸方向の加速度の大きさである総合加速度(図9参照)の0.5秒間分を高速フーリエ変換(FFT)でスペクトル解析すると、図10に示すように、2Hz、3Hzにおいてスペクトル強度が強いという解析結果が得られる。このような解析結果が得られた場合、ユーザが歩行したものと判別され、携帯電話1は歩行を検知する。
【0061】
一方、ガイダンスポイントや通話の着信時等に、振動モータM1が振動しても、振動モータM1は130Hzで振動するため、加速度センサSN1で振動を検出しても、ローパスフィルタLPFによりサンプリングされる前に遮断される。この結果、サンプリングされた加速度データには、振動モータM1の周波数の振動がエイリアスにより検出されることが防止されるので、振動モータM1が振動した場合に、歩行と誤検出することが防止される。したがって、実施例1の携帯電話は精度良く歩行を検出できるので、ユーザが停止中に振動モータM1の振動により歩行を誤検出して、携帯電話1が検出している現在位置と、ユーザの実際の現在位置とがずれることを低減できる。
【実施例2】
【0062】
次に本発明の実施例2の携帯ナビゲーションシステムSの説明を行うが、この実施例2の説明において、前記実施例1の構成要素に対応する構成要素には同一の符号を付して、その詳細な説明を省略する。
この実施例2は、下記の点で前記実施例1と相違しているが、他の点では前記実施例1と同様に構成されている。
(携帯電話1の制御部の説明)
図11は実施例2の携帯電話1の制御部分が備えている各機能をブロック図(機能ブロック図)で示した図であり、実施例1の図2に対応する図である。
図11において、実施例2の携帯ナビゲーションシステムSの携帯電話1では、加速度検出装置13′は、実施例1の加速度検出装置13からローパスフィルタLPFが省略されている。そして、実施例2の加速度サンプリング手段KC0は、実施例1と同様に、サンプリング周波数fsが64Hzでサンプリングを行う。また、実施例2の携帯電話1では、振動モータM1として、設定値が150Hzで公差(設計誤差や製造誤差等)が±8Hz、即ち、142Hz〜158Hzの装置発生周波数fvで振動する振動モータM1を選定する。また、実施例2の携帯電話1では、実施例1と異なり、スペクトル解析実行間隔t0が1秒に設定されており、1秒間分(即ち64個)の加速度データに基づいて、スペクトル解析を行っている。
【0063】
(実施例2の作用)
図12は、実施例2の携帯電話1において、発生した周波数と、エイリアスとして観測される周波数との関係を説明する説明図であり、縦軸にエイリアスとして観測される周波数、横軸に発生した周波数をとった説明図である。
前記構成を備えた実施例2の携帯電話1では、サンプリング周波数が64Hzに設定されているので、ナイキスト周波数(=64Hz/2=32Hz)ごとに特異点が現れる。即ち、図12に示すように、64Hz,96Hz,128Hz,160Hz、…の振動が発生した場合、64Hzでサンプリングを行うと、波の節の部分を常に観測するため、観測結果は、常に止まっているかのように見える。そして、65Hz〜95Hzの間の振動が発生した場合、エイリアスにより、1Hz〜31Hzの振動として観測され、97Hz〜127Hzの間の振動が発生した場合、31Hz〜1Hzの振動として観測される。以下同様にして、129Hz〜159Hzの振動が発生した場合には1Hz〜31Hz、161Hz〜191Hzの振動が発生した場合には31Hz〜1Hzの振動として観測される。
【0064】
したがって、振動モータM1の装置発生周波数fvを、ナイキスト周波数(=fs/2)の整数倍に設定すれば、振動モータM1の振動は観測されないので、歩行の検出に影響を与えない。しかしながら、設計誤差や製造誤差等により振動モータM1の振動数fvにはばらつきがある。したがって、例えば、装置発生周波数fvをサンプリング周波数fsの整数倍に設定した場合、サンプリング周波数fsの整数倍からわずか2Hzずれてしまうと、エイリアスにより歩行特有のスペクトル2Hz(=fw)が観測されてしまう。
しかしながら、実施例2の携帯電話1では、装置発生周波数fvが142Hz〜158Hzの振動モータM1が選定されているので、振動モータM1の振動は、14Hz〜30Hzの振動として観測される。
【0065】
図13は、実施例2の携帯電話において、ユーザが歩行中にバイブレーションが発生した時に観測された振動波形のグラフであり、縦軸に総合加速度(3軸合成加速度)、横軸に時間を取ったグラフである。
図14は実施例1の図10に対応するスペクトル解析結果を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
図13において、歩行中に振動モータM1が作動した時に2秒間分サンプリングを行うと、図13に示すような波形が観測される。そして、図13に示す加速度データに基づいて、FFTによりスペクトル解析を行うと、図14に示すように、2Hzと22Hzに強いスペクトルが観測される。
【0066】
したがって、振動モータM1の振動は、22Hz付近に観測され、歩行のスペクトルfw(1〜4Hz)とは分離されて観測される。この結果、振動モータM1の振動が歩行特有のスペクトルfw(=1Hz〜4Hz)として観測されることが防止され、振動モータM1により歩行を誤検知することが防止できる。また、実施例2の携帯電話1は、実施例1の携帯電話1に比べ、ローパスフィルタLPFが省略されているので、部品点数が少なくなり、低コスト化できる。
なお、実施例2の携帯電話1の振動モータM1は、装置発生周波数fvが150Hz±8Hzのものを選定したが、これに限定されず、mを整数とした場合に、エイリアスにより観測される周波数である|fs×m−fv|が歩行特有のスペクトル(歩行スペクトル)fwと一致しない範囲、即ち、|fs×m−fv|≠fwを満足する範囲で設定することができる。
【実施例3】
【0067】
次に本発明の実施例3の携帯ナビゲーションシステムSの説明を行うが、この実施例3の説明において、前記実施例1、2の構成要素に対応する構成要素には同一の符号を付して、その詳細な説明を省略する。
この実施例3は、下記の点で前記実施例1、2と相違しているが、他の点では前記実施例1、2と同様に構成されている。
【0068】
(携帯電話1の制御部の説明)
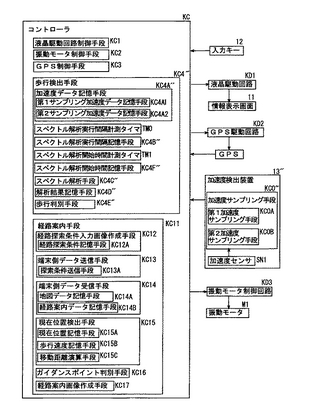
図15は実施例3の携帯電話1の制御部分が備えている各機能をブロック図(機能ブロック図)で示した図であり、実施例1の図2に対応する図である。
図15において、実施例3の加速度検出装置13″は、実施例2の加速度検出装置13′と同様に、ローパスフィルタLPFが省略されている。また、実施例3の加速度サンプリング手段KC0″は、第1加速度サンプリング手段KC0Aと、第2加速度サンプリング手段KC0Bとを有している。
前記第1加速度サンプリング手段KC0Aは、加速度センサSN1から出力された出力信号を予め設定された第1サンプリング周波数fs1でサンプリングし、第2加速度サンプリング手段KC0Bは、予め設定された第2サンプリング周波数fs2でサンプリングする。なお、実施例3の加速度サンプリング手段KC0では、第1サンプリング周波数fs1が64Hzに設定され、第2サンプリング周波数fs2が50Hzに設定されている。なお、実施例3の振動モータM1として、実施例1の振動モータM1と同様に、130Hz(装置発生周波数fv)で振動するモータが使用される。
【0069】
(携帯電話1のコントローラKCの機能)
図11において、実施例3の携帯電話1のコントローラKCは、実施例1のコントローラKCの歩行検出手段KC4とは異なる歩行検出手段KC4″を有している。前記歩行検出手段KC4″は、加速度データ記憶手段KC4A″と、スペクトル解析実行間隔記憶手段KC4B″と、スペクトル解析実行間隔計測タイマTM0と、スペクトル解析開始時間記憶手段KC4F″と、スペクトル解析開始時間計測タイマTM1と、スペクトル解析手段KC4C″と、解析結果記憶手段KC4D″と、歩行判別手段KC4E″とを有している。そして、前記歩行検出手段KC4″は、前記加速度検出装置13″から出力される検出信号に基づいて、携帯電話1を携帯したユーザの歩行を検出する。
【0070】
KC4A″:加速度データ記憶手段
加速度データ記憶手段KC4A″は、前記第1加速度サンプリング手段KC0Aでサンプリングされた第1サンプリング加速度データを読取り、記憶する第1サンプリング加速度データ記憶手段KC4A1と、前記第2加速度サンプリング手段KC0Bでサンプリングされた第2サンプリング加速度データを読取り、記憶する第2サンプリング加速度データ記憶手段KC4A2と、を有する。なお、実施例3の加速度データ記憶手段KC4A″は、第1加速度サンプリング手段KC0Aにより64Hzの第1サンプリング周波数fs1でサンプリングされた加速度データを64個(=26個)記憶可能に構成され、第2サンプリング加速度データ記憶手段KC4A2は、第2加速度サンプリング手段KC0Bにより50Hzの第2サンプリング周波数fs2でサンプリングされた加速度データを64個記憶可能に構成されている。
【0071】
KC4B″:スペクトル解析実行間隔記憶手段
スペクトル解析実行間隔記憶手段KC4B″は、スペクトル解析を実行する間隔であるスペクトル解析実行間隔t0を記憶する。実施例3のスペクトル解析実行間隔記憶手段KC4B″は、スペクトル解析実行間隔t0として、1秒を記憶している。
TM0:スペクトル解析実行間隔計測タイマ
スペクトル解析実行間隔計測タイマTM0は、前記スペクトル解析実行間隔t0がセットされ、スペクトル解析実行間隔t0が経過するとタイムアップする。
KC4F″:スペクトル解析開始時間記憶手段
スペクトル解析開始時間記憶手段KC4F″は、最初にスペクトル解析を開始するまでの時間であるスペクトル解析開始時間t1を記憶する。実施例3のスペクトル解析開始時間t1は、50Hzでサンプリングされた第2サンプリング加速度データが64個記憶されるまでに必要な時間である1.28秒に設定されている。
TM1:スペクトル解析開始時間計測タイマ
スペクトル解析開始時間計測タイマTM1は、前記スペクトル解析開始時間t1がセットされ、スペクトル解析開始時間t1が経過するとタイムアップする。
【0072】
KC4C″:スペクトル解析手段
スペクトル解析手段KC4C″は、前記加速度データ記憶手段KC4A″に記憶された第1サンプリング加速度データおよび第2サンプリング加速度データについて、それぞれ加速度の大きさ(総合加速度)を演算した後、高速フーリエ変換(FFT)によりスペクトル解析を行う。なお、実施例3のスペクトル解析手段KC4C″は、第1サンプリング加速度データについては0Hz〜32Hzの範囲で64個のスペクトル値(0.5Hz毎)に対してスペクトル強度を求め、第2サンプリング加速度データについては、0Hz〜25Hz(=50Hz/2=ナイキスト周波数)の範囲で64個のスペクトル値(約0.39Hz毎)に対してスペクトル強度を求める。
【0073】
KC4D″:解析結果記憶手段
解析結果記憶手段KC4D″は、前記高速フーリエ変換KC4C″でのスペクトル解析の結果を記憶する。
KC4E″:歩行判別手段
歩行判別手段KC4E″は、前記解析結果記憶手段KC4D″に記憶されたスペクトル解析の結果から、歩行特有のスペクトルである歩行スペクトルが検出されたか否かの判別を行う。実施例3の歩行判別手段KC4E″は、スペクトル解析の結果、第1サンプリング加速度データの解析により1.5Hz〜4Hzの間にスペクトル強度がスペクトル強度閾値Ns(実施例3ではNs=1.0)以上のものが計測され、且つ、第2サンプリング加速度データの解析により同様に1.5Hz〜4Hzの間にスペクトル強度がスペクトル強度閾値Ns以上のものが計測された場合に、歩行と判別する。
【0074】
(携帯端末(携帯電話)のフローチャートの説明)
(歩行検知処理のフローチャートの説明)
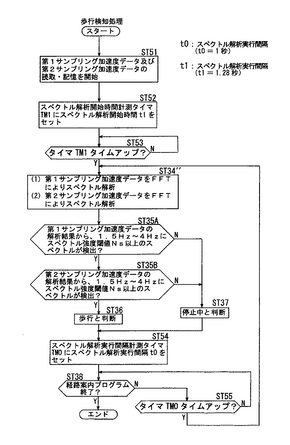
図16は実施例3の携帯ナビゲーションシステムの携帯電話が備えている歩行検知処理のフローチャートであり、実施例1の図8に対応する図である。
図16のフローチャートの各ST(ステップ)の処理は、前記コントローラKCのROM等に記憶されたプログラムに従って行われる。また、この処理は携帯電話1の他の各種処理(前記経路案内処理等)と並行して実行される。なお、図16のフローチャートの説明において、実施例1の歩行検知処理と同様の処理には同一のST番号を付し、詳細な説明は省略する。なお、実施例3の携帯ナビゲーションシステムSにおいて、サーバ7の案内経路作成処理(図6参照)や携帯電話1の経路案内処理(図7参照)は、実施例1の各処理と同様の処理が実行されるので、詳細な説明は省略する。
【0075】
図16に示すフローチャートは、ナビゲーションプログラム(経路案内プログラム)の起動により開始される。
図16のST51において、加速度検出装置13″から出力された第1サンプリング加速度データおよび第2サンプリング加速度データの読取り、記憶を開始する。そして、ST52に移る。
ST52において、スペクトル解析開始時間計測タイマTM1にスペクトル解析開始時間t1をセットする。そして、ST53に移る。
ST53において、スペクトル解析開始時間計測タイマTM1がタイムアップしたか否かを判別する。ノー(N)の場合はST53を繰り返し、イエス(Y)の場合はST34″に移る。
ST34″において、次の処理(1)、(2)を実行して、ST35Aに移る。
(1)記憶した第1サンプリング加速度データに基づいて、加速度の大きさを演算した後、高速フーリエ変換(FFT)によりスペクトル解析を行う。
(2)記憶した第2サンプリング加速度データに基づいて、加速度の大きさを演算した後、高速フーリエ変換(FFT)によりスペクトル解析を行う。
【0076】
ST35Aにおいて、第1サンプリング加速度データのFFTの解析結果から、1.5Hz〜4Hzの範囲内に、スペクトル強度閾値Ns以上のスペクトル強度を持つスペクトルが検出されたか否かを判別する。イエス(Y)の場合はST35Bに移り、ノー(N)の場合はST37に移る。
ST35Bにおいて、第2サンプリング加速度データのFFTの解析結果から、1.5Hz〜4Hzの範囲内に、スペクトル強度閾値Ns以上のスペクトル強度を持つスペクトルが検出されたか否かを判別する。イエス(Y)の場合はST36に移り、ノー(N)の場合はST37に移る。
次に、実施例1の歩行検知処理(図8参照)と同様のST36,ST37を実行して、ST54に移る。
【0077】
ST54において、ST32と同様にスペクトル解析実行間隔計測タイマTM0にスペクトル解析間隔t0をセットする。そして、ST38に移る。
次に、実施例1の歩行検知処理(図8参照)と同様のST38の判別処理を実行する。ノー(N)の場合はST55に移り、イエス(Y)の場合は図16の歩行検知処理を終了する。
ST55において、スペクトル解析実行間隔計測タイマTM0がタイムアップしたか否かを判別するノー(N)の場合はST38に戻り、イエス(Y)の場合はST34″に戻る。
【0078】
(実施例3の作用)
図17は、実施例2の図12に対応する実施例3の携帯電話において、発生した周波数と、エイリアスとして観測される周波数との関係を説明する説明図であり、縦軸にエイリアスとして観測される周波数、横軸に発生した周波数をとった説明図である。
図17において、前記構成を備えた実施例3の携帯電話1では、第1サンプリング周波数である64Hzでサンプリングすると32Hz(=64Hz/2=ナイキスト周波数)ごとに特異点が現れ、第2サンプリング周波数である50Hzでサンプリングすると25Hz(=50Hz/2=ナイキスト周波数)毎に特異点が現れる。そして、図17に示すように、第1サンプリング周波数でサンプリングした場合には、32Hzより大きな振動ではエイリアスが発生し、第2サンプリング周波数でサンプリングした場合には、25Hzより大きな振動ではエイリアスが発生する。
【0079】
しかしながら、実施例3の携帯電話1では、第1サンプリング周波数が64Hzに設定され、第2サンプリング周波数が50Hzに設定されているので、一方のサンプリング周波数と他方のサンプリング周波数とが互いに整数倍ではない値に設定されている。したがって、一方のサンプリング周波数のスペクトル解析結果において、エイリアスにより、振動モータM1の振動が歩行特有のスペクトルと一致して観測されても、他方のサンプリング周波数のスペクトル解析結果において、振動モータM1の振動が歩行特有のスペクトルと一致することが防止される。
【0080】
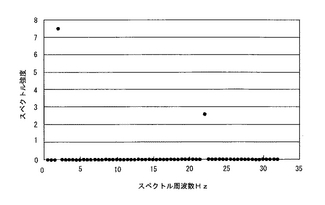
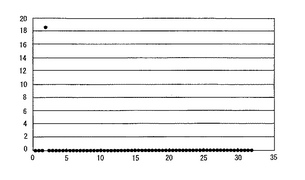
図18は実施例3の第1サンプリング加速度データのスペクトル解析結果の一例を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
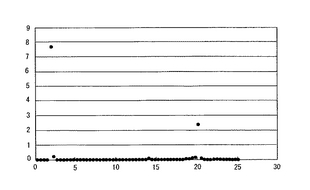
図19は実施例3の第2サンプリング加速度データのスペクトル解析結果の一例を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
図18,図19において、実施例3の携帯電話1において、ユーザが歩行中に振動モータM1(装置発生周波数fvが130Hz)が振動した場合、図18、図19に示すような結果が得られた。即ち、図18において、第1サンプリング周波数fs1(=64Hz)でサンプリングした結果、エイリアスにより振動モータM1の振動が2Hzとして観測され、且つ、歩行の振動の2Hzとが一致する。一方、図19において、第2サンプリング周波数fs2(=50Hz)でサンプリングした結果、歩行の振動が1.95Hz(約2Hz)に観測され、振動モータM1の振動が20Hzに観測される。したがって、図18,図19に示すように、第1サンプリング加速度データおよび第2サンプリング加速度データの両方のスペクトル解析の結果、両方共に、1.5Hz〜4Hzの間に強いスペクトルが観測されたので、歩行と検出される(ST35Bで(Y)の場合参照)。一方、ユーザが停止中に振動モータM1が振動しても、第1サンプリング周波数のスペクトル解析結果では2Hzが観測されるが、第2サンプリング周波数のスペクトル解析結果では、20Hzのところのみに強いスペクトルが観測され、2Hzに強いスペクトルが観測されないので、停止中と判別される(ST35Bで(N)の場合参照)。
【0081】
この結果、実施例3の携帯電話1は、振動モータM1の装置発生周波数とサンプリング周波数との関係で、一方のサンプリング周波数のスペクトル解析結果において、エイリアスにより、振動モータM1の振動と歩行の振動とが区別できない場合でも、他方のスペクトル解析結果では、振動モータM1の振動が歩行の振動とは分離して観測されるので、振動モータM1の振動と歩行の振動とを区別できる。したがって、振動モータによる振動を歩行と誤検出することが防止され、現在位置の検出精度を高めることができる。
【産業上の利用可能性】
【0082】
(変更例)
以上、本発明の実施例を詳述したが、本発明は、前記実施例に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内で、種々の変更を行うことが可能である。
例えば、前記各実施例において、GPS装置を備えた携帯型経路案内装置について説明をしたが、GPS装置を備えていない携帯型経路案内装置に適用することも可能である。
【0083】
また、前記各実施例において、歩行検出時にユーザが経路上を移動しているものとして経路案内を行ったが、これに限定されず、例えば、従来公知の傾斜センサや方位センサ(特開平8−278137号公報等参照)を使用して、ユーザが移動した方向も検出して、経路案内を行うことも可能である。
さらに、本発明の携帯型経路案内装置は、携帯電話1に限定されず、PDAやノート型パソコン等の携帯端末(携帯型経路案内装置)に適用可能である。また、このほかにも携帯型のミュージックプレイヤー(ヘッドホンステレオやMP3プレイヤー等)等にこの機能を内蔵することも可能である。
【0084】
また、前記各実施例において、地図データの配信や経路探索は携帯ナビゲーション用データ配信サーバ7との交信により行われたが、携帯型経路案内装置のデータ記憶容量や処理速度が十分にある場合には、携帯型経路案内装置で全地図データの記憶や経路探索を行い、携帯ナビゲーション用データ配信サーバ7との交信を省略することも可能である。
さらに、前記実施例1において、周波数遮断装置としてローパスフィルタを使用したが、これに限定されず、装置発生周波数近辺の帯域の周波数を遮断するノッチフィルタ(Notch Filter、または バンドエリミネーションフィルタ:Band Elimination Filter)や歩行スペクトルの帯域の周波数のみ通過させるバンドパスフィルタ(Band Pass Filter)を使用することも可能である。
【0085】
また、前記各実施例において、移動距離は歩行速度と歩行時間とに基づいて演算したが、これに限定されず、加速度データから振動のピークを検出して歩数をカウントし、歩幅と歩数とに基づいて移動距離を演算することも可能である。他にも、歩行速度を複数記憶しておき、スペクトル解析で検出されたスペクトル値に応じて、使用する歩行速度を選択することも可能である。例えば、スペクトル値が1.5Hz以下で最も強かった場合には歩行速度を60m/分とし、3Hz以上で最も強かった場合には、歩行速度を100m/分として移動距離を演算することが可能である。
さらに、前記実施例1において、遮断周波数を、サンプリング周波数の1/2に設定したが、この値に限定されず、歩行スペクトルより大きく、装置発生周波数より小さい値、例えば、16Hzや64Hz等に設定することが可能である。
【0086】
また、前記各実施例において、サンプリング周波数の値や加速度データを記憶する期間、スペクトル強度閾値等の具体的数値は、実施例に示した値に限定されず、変更可能である。
さらに、前記各実施例において、歩行と検出する歩行スペクトルfwを1Hz〜4Hzに設定したが、この範囲に限定されず、小走りやゆっくり歩く場合を検出する必要がなければ2Hzとしたり、小走りの場合を検出する必要がない場合には1.5Hz〜2.5Hz等の値にすることも可能である。
【0087】
なお、上記各実施例において歩行検出手段KC4は、加速度データ記憶手段KC4A、スペクトル解析手段KC4C、解析結果記憶手段KC4D、歩行判別手段KC4Eから構成されるモジュールとして説明したが、加速度データ記憶手段KC4A、スペクトル解析手段KC4C等が別モジュールに構成されるものであってもよい。この場合、歩行検出手段KC4は、加速度データ記憶手段KC4A、スペクトル解析手段KC4C等から構成されるモジュールから必要な情報を得るように構成すればよい。
【0088】
また、前記実施例3において、スペクトル解析開始時間t1を設定して、第2サンプリング加速度データが64個記憶されてからスペクトル解析を行ったが、歩行検知処理の開始直後の歩行検知が正確でなくてもよければ、スペクトル解析開始時間t1を使用せず、スペクトル解析実行間隔t0でスペクトル解析を行うことも可能である。
さらに、前記実施例3において、第1サンプリング加速度データに基づくスペクトル解析の時期と、第2サンプリング加速度データに基づくスペクトル解析のタイミングとが一致していたが、これらはそれぞれ個別のタイミングで実行することも可能である。例えば、第1サンプリング加速度データに基づくスペクトル解析は、128個分のデータが更新される2秒間隔で行い、第2サンプリング加速度データに基づくスペクトル解析は、128個分のデータが更新される2.56秒間隔で行っておき、歩行の検知は2秒間隔で実行することも可能である。
【図面の簡単な説明】
【0089】
【図1】本発明の携帯ナビゲーションシステムの実施例1の説明図である。
【図2】図1に示す携帯ナビゲーションシステムの携帯端末の機能をブロック図(機能ブロック図)で示した図である。
【図3】実施例1の経路探索条件画像の説明図である。
【図4】経路案内画像の説明図であり、図4Aは経路案内を開始した場合の経路案内画像の説明図、図4Bは経路上を歩行している場合の経路案内画像の説明図、図4Cはガイダンスポイントで停止した場合の経路案内画像の説明図、図4Dは目的地に近づいた場合の経路案内画像の説明図である。
【図5】実施例1の携帯ナビゲーションシステムのサーバの機能をブロック図(機能ブロック図)で示した図である。
【図6】実施例1の携帯ナビゲーションシステムのサーバの案内経路作成処理のメインフローチャートである。
【図7】実施例1の携帯ナビゲーションシステムの携帯電話が備えている経路案内処理のフローチャートである。
【図8】実施例1の携帯ナビゲーションシステムの携帯電話が備えている歩行検知処理のフローチャートである。
【図9】実施例1の携帯端末を携帯したユーザが歩行中に携帯電話で計測された加速度データの一例の説明図であり、縦軸に加速度の値、横軸に時間をとった説明図である。
【図10】図9の加速度データのスペクトル解析結果を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
【図11】は実施例2の携帯電話1の制御部分が備えている各機能をブロック図(機能ブロック図)で示した図であり、実施例1の図2に対応する図である。
【図12】実施例2の携帯電話1において、発生した周波数と、エイリアスとして観測される周波数との関係を説明する説明図であり、縦軸にエイリアスとして観測される周波数、横軸に発生した周波数をとった説明図である。
【図13】実施例2の携帯電話において、ユーザが歩行中にバイブレーションが発生した時に観測された振動波形のグラフであり、縦軸に総合加速度(3軸合成加速度)、横軸に時間を取ったグラフである。
【図14】実施例1の図10に対応するスペクトル解析結果を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
【図15】実施例3の携帯電話1の制御部分が備えている各機能をブロック図(機能ブロック図)で示した図であり、実施例1の図2に対応する図である。
【図16】実施例3の携帯ナビゲーションシステムの携帯電話が備えている歩行検知処理のフローチャートであり、実施例1の図8に対応する図である。
【図17】実施例2の図12に対応する実施例3の携帯電話において、発生した周波数と、エイリアスとして観測される周波数との関係を説明する説明図であり、縦軸にエイリアスとして観測される周波数、横軸に発生した周波数をとった説明図である。
【図18】実施例3の第1サンプリング加速度データのスペクトル解析結果の一例を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
【図19】実施例3の第2サンプリング加速度データのスペクトル解析結果の一例を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
【図20】3軸加速度センサと、回転数が7800rpmの振動モータを備え、サンプリング周波数が64Hzである携帯電話において、振動モータを振動させた場合のサンプリング結果の説明図である。
【図21】図20のサンプリング結果を高速フーリエ変換して得られたスペクトルの説明図である。
【図22】ユーザが歩行中に3次元加速度センサの出力信号をサンプリング周波数が64Hzでサンプリングした結果を高速フーリエ変換して得られたスペクトル解析結果の説明図である。
【符号の説明】
【0090】
1…携帯型経路案内装置、
11…表示画面、
20…経路案内画像、
fco…遮断周波数、
fs…サンプリング周波数、
fs1…第1サンプリング周波数、
fs2…第2サンプリング周波数、
fv…装置発生周波数、
fw…歩行スペクトル,歩行時周波数、
KC4…歩行検出手段、
KC4″…歩行検出手段、
KC4A…加速度データ記憶手段、
KC4A1…第1サンプリング加速度データ記憶手段、
KC4A2…第2サンプリング加速度データ記憶手段、
KC4C…スペクトル解析手段、
KC4C″…スペクトル解析手段、
KC4E…歩行判別手段、
KC4E″…歩行判別手段、
KC17…案内画像作成手段、
LPF…ローパスフィルタ,周波数遮断装置、
M1…振動発生装置、
SN1…加速度センサ。
【技術分野】
【0001】
本発明は、経路の案内が可能な携帯電話やPDA(Personal Digital Assistance)、ノート型パーソナルコンピュータ等のユーザが携帯可能な携帯型経路案内装置に関し、特に、ユーザの歩行を検出してユーザの歩行に応じた経路案内が可能な携帯型経路案内装置に関する。
【背景技術】
【0002】
携帯型の経路案内装置において、ユーザの現在位置を検出するために、GPS(Global Positioning System:全地球無線測位システム)を利用するものが知られている。しかし、GPSを使用する場合、地下や屋内のようなGPSの電波を受信できない場所では、現在位置を検出できず、経路案内ができないという問題がある。
この問題を解決するために、携帯型の経路案内装置において、使用者の歩行を検出して移動距離を求め、現在位置を検出しようとすることが考えられる。歩行を検出する方法として、携帯型の経路案内装置に以下の公知技術を適用することが考えられる。
【0003】
(特許文献1(特開2002−191580号公報)記載の技術)
特許文献1には、加速度を検出する加速度センサを備え、加速度センサの出力をサンプリングして、フーリエ変換により歩行特有のスペクトル(2Hz程度)を検出することにより歩行を検出する歩数計に関する技術が記載されている。
(特許文献2(特開2002−197437号公報)記載の技術)
特許文献2には、マイクでとらえた音響データにローパスフィルタをかけて、歩行時に発生する特有の低周波音を検出することにより歩行を検出する歩行検出装置に関する技術が記載されている。
【0004】
【特許文献1】特開2002−191580号公報(段落番号「0050」〜「0057」)
【特許文献2】特開2002−197437号公報(段落番号「0018」〜「0022」)
【発明の開示】
【発明が解決しようとする課題】
【0005】
(従来技術の問題点)
しかしながら、前記特許文献2記載の技術を携帯電話等の携帯型経路案内装置で実施することを考えた場合、マイクの周波数特性が、歩行特有の低周波音を検出するために必要な低域までカバーしていなかったり、外部の音の影響が少なからずあるという問題がある。
したがって、特許文献1記載の技術のように、加速度をサンプリングしてフーリエ変換によって歩行特有のスペクトルを検出する方が確実な歩行検出が行うことができるものと考えられる。
しかし、本出願の発明者による研究の結果、携帯電話で既に実施されている歩行ナビゲーションシステム(経路案内システム)に、特許文献1記載の歩行検出手段を適用すると問題があることがわかった。
【0006】
携帯電話には、電話の着信をユーザに知らせるために携帯電話を振動させるバイブレーション機能が搭載されている。また、歩行ナビゲーションにおいても、ガイダンスポイント(交差点や案内経路の曲がり角等)をバイブレーションによりユーザに告知する機能がある。このバイブレーション機能による振動は、携帯電話に搭載された振動モータ(振動発生装置)により発生しているが、概ね5000〜10000rpmの回転数の前記振動モータが使用されている。前記回転数を周波数(振動数)に直すと、83〜167Hz程度である。
一方、検出すべき歩行特有の振動数(周波数)は、特許文献1に記載されているように、2Hz程度である。したがって、加速度のサンプリング周波数は、サンプリング定理から、2Hzの2倍の4Hz以上であれば歩行の検出が可能である。しかし、ゆっくり歩行した場合や、小走りで歩行した場合には、2Hzの前後(例えば、1.5Hzや4Hz)に歩行の周波数が検出されるため、これらも考慮してサンプリング周波数を設定する必要がある。しかし、必要以上にサンプリング周波数を大きくすると、データ量が増えるため、携帯電話の付帯機能としてはリソースが不足してしまう問題がある。したがって、実際には、8Hz〜64Hz程度のサンプリング周波数でサンプリングを行えば十分である。
【0007】
しかし、本発明者の研究の結果、前記周波数の振動モータを搭載し、前記サンプリング周波数でサンプリングする携帯電話において、加速度のサンプリング中に振動モータがオンになり、バイブレーションが発生すると、振動モータにより発生したバイブレーションが加速度のサンプリングに悪影響を与えることが判明した。例えば、サンプリング周波数を64Hzである場合、振動モータの振動数はサンプリングのナイキスト周波数(サンプリング周波数の1/2の周波数)32Hzより高いので、加速度のサンプリングデータには、エイリアス(ナイキスト周波数以上の周波数成分が虚像として現れる現象)が発生する。前記エイリアスは、加速度のサンプリング周波数がバイブレーションの振動数(振動モータの振動数)に対して低すぎるために発生する。バイブレーションによるエイリアスを防止するためには、ナイキスト周波数をバイブレーションの振動数よりも高い値に設定すればよい。しかしながら、ナイキスト周波数をバイブレーションの振動数よりも高くすると、サンプリング周波数が400Hz近くになってしまい、データ量が膨大になるため、実現は困難である。
【0008】
次に、前記エイリアスが歩行検出に悪影響を及ぼす具体例を説明する。
3軸の加速度センサと、回転数が7800rpm、即ち、振動数が130Hzの振動モータとを備え、サンプリング周波数が64Hzである携帯電話において、振動モータを振動させた場合を例に取る。
【0009】
図20は3軸加速度センサと、回転数が7800rpmの振動モータを備え、サンプリング周波数が64Hzである携帯電話において、振動モータを振動させた場合のサンプリング結果の説明図である。
図21は図20のサンプリング結果を高速フーリエ変換して得られたスペクトルの説明図である。
図22はユーザが歩行中に3次元加速度センサの出力信号をサンプリング周波数が64Hzでサンプリングした結果を高速フーリエ変換して得られたスペクトル解析結果の説明図である。
なお、図20において、縦軸の加速度の値は、3軸の加速度センサの各軸の検出結果の二乗和の平方根の値であり、総合的な加速度(加速度の大きさ)を示している。
【0010】
図20,図21において、振動モータは130Hzで振動しているので、実際には130Hzのサイン波が発生しているが、サンプリング周波数が64Hzなので、エイリアスが発生して、図20に示す波形が観測される。したがって、図20に示す観測データを高速フーリエ変換してスペクトルを求めると、図21に示すように2Hzにピークを持ったスペクトルが観測されてしまう。一方、図22に示すように、歩行時に検出される振動のスペクトルは2Hz程度であるため、このままでは歩行による振動と、振動モータによる振動との区別がつかない。したがって、例えば、携帯電話を携帯したユーザが立ち止まっている時に着信があった場合や、ガイダンスポイントである交差点で信号待ち等により停止した場合に、バイブレーションがオンになると誤って歩行と検出してしまい、現在位置の検出を誤るといった問題が発生する。
【0011】
本発明は、前述の事情に鑑み、振動発生装置(振動モータ)による振動を、歩行と誤検出することを防止することを技術的課題とする。
【課題を解決するための手段】
【0012】
次に、前記課題を解決した本発明を説明するが、本発明の要素には、後述の実施の形態の具体例(実施例)の要素との対応を容易にするため、実施例の要素の符号をカッコで囲んだものを付記する。また、本発明を後述の実施例の符号と対応させて説明する理由は、本発明の理解を容易にするためであり、本発明の範囲を実施例に限定するためではない。
【0013】
(本発明)
(第1発明)
前記技術的課題を解決するために第1発明の携帯型経路案内装置(1)は、
出発地から目的地までの経路を案内する経路案内画像(24)を表示する表示画面(11)と、
携帯型経路案内装置(1)の加速度を検出する加速度センサ(SN1)と、
前記加速度センサ(SN1)の検出信号を所定のサンプリング周波数(fs)でサンプリングした加速度データを記憶する加速度データ記憶手段(KC4A)と、
前記加速度データ記憶手段(KC4A)に記憶された前記加速度データをスペクトル解析するスペクトル解析手段(KC4C)と、
前記スペクトル解析手段(KC4C)の解析により歩行特有のスペクトルである歩行スペクトル(fw)が検出されたか否かを判別することにより前記携帯型経路案内装置(1)を携帯したユーザの歩行を検出する歩行検出手段(KC4)と、
前記歩行検出手段(KC4)の検出結果に応じて、前記経路案内画像(24)を作成する案内画像作成手段(KC17)と、
装置発生周波数(fv)で前記携帯型経路案内装置(1)を振動させる振動発生装置(M1)と、
前記サンプリング周波数(fs)の1/2以上且つ前記装置発生周波数(fv)より小さい遮断周波数(fco)を有し、前記加速度センサ(SN1)の検出信号から前記遮断周波数(fco)以下の検出信号を通過させるローパスフィルタ(LPF)と、
を備えたことを特徴とする。
【0014】
(第1発明の作用)
前記構成要件を備えた第1発明の携帯型経路案内装置(1)では、振動発生装置(M1)は、遮断周波数(fco)より大きな装置発生周波数(fv)で携帯型経路案内装置(1)を振動させる。前記サンプリング周波数(fs)の1/2以上の遮断周波数(fco)を有するローパスフィルタ(LPF)は、前記加速度センサ(SN1)の検出信号から前記遮断周波数(fco)以下の検出信号を通過させる。
したがって、第1発明の携帯型経路案内装置(1)は、ローパスフィルタ(LPF)により、装置発生周波数(fv)の振動が遮断された後、前記サンプリング周波数(fs)でサンプリングされる。この結果、サンプリングされた加速度データには、装置発生周波数(fv)の振動がエイリアスにより検出されることが防止されるので、振動発生装置(M1)による振動を歩行と誤検出することが防止される。
【0015】
(第2発明)
前記技術的課題を解決するために第2発明の携帯型経路案内装置(1)は、
出発地から目的地までの経路を案内する経路案内画像(24)を表示する表示画面(11)と、
携帯型経路案内装置(1)の加速度を検出する加速度センサ(SN1)と、
前記加速度センサ(SN1)の検出信号を所定のサンプリング周波数(fs)でサンプリングした加速度データを記憶する加速度データ記憶手段(KC4A)と、
前記加速度データ記憶手段(KC4A)に記憶された前記加速度データをスペクトル解析するスペクトル解析手段(KC4C)と、
前記スペクトル解析手段(KC4C)の解析により歩行特有のスペクトルである歩行スペクトル(fw)が検出されたか否かを判別することにより前記携帯型経路案内装置(1)を携帯したユーザの歩行を検出する歩行検出手段(KC4)と、
前記歩行検出手段(KC4)の検出結果に応じて、前記経路案内画像(24)を作成する案内画像作成手段(KC17)と、
前記携帯型経路案内装置(1)を振動させる振動発生装置(M1)と、
前記サンプリング周波数(fs)をfs、前記振動発生装置(M1)が発生する装置発生周波数(fv)をfv、前記歩行スペクトル(fw)をfwとし、mを整数とした場合に、|fs×m−fv|≠fwとなるように設定された前記サンプリング周波数(fs)および前記装置発生周波数(fv)と、
を備えたことを特徴とする。
【0016】
(第2発明の作用)
前記構成要件を備えた第2発明の携帯型経路案内装置(1)では、前記サンプリング周波数(fs)および前記装置発生周波数(fv)が、前記サンプリング周波数(fs)をfs、前記振動発生装置(M1)が発生する装置発生周波数(fv)をfv、前記歩行スペクトル(fw)をfwとし、mを整数とした場合に、|fs×m−fv|≠fwとなるように設定されている。
したがって、第2発明の携帯型経路案内装置(1)は、|fs×m−fv|≠fwとなるようにサンプリング周波数(fs)および前記装置発生周波数(fv)が設定されているので、振動発生装置(M1)が振動しても、エイリアスにより装置発生周波数(fv)fvが歩行スペクトル(fw)fwとして検出されない。この結果、振動発生装置(M1)による振動を歩行と誤検出することが防止される。
【0017】
(第3発明)
前記技術的課題を解決するために第3発明の携帯型経路案内装置(1)は、
出発地から目的地までの経路を案内する経路案内画像(24)を表示する表示画面(11)と、
携帯型経路案内装置(1)の加速度を検出する加速度センサ(SN1)と、
前記加速度センサ(SN1)の検出信号を第1サンプリング周波数(fs1)でサンプリングした第1サンプリング加速度データを記憶する第1サンプリング加速度データ記憶手段(KC4A1)と、
前記第1サンプリング周波数(fs1)とは異なる第2サンプリング周波数(fs2)で前記加速度センサ(SN1)の検出信号をサンプリングした第2サンプリング加速度データを記憶する第2サンプリング加速度データ記憶手段(KC4A2)と、
前記第1サンプリング加速度データおよび前記第2サンプリング加速度データをスペクトル解析するスペクトル解析手段(KC4C″)と、
前記スペクトル解析手段(KC4C″)による前記第1サンプリング加速度データの解析により歩行特有のスペクトルである歩行スペクトル(fw)が検出され且つ、前記スペクトル解析手段(KC4C″)による前記第2サンプリング加速度データの解析により前記歩行スペクトル(fw)が検出された場合に、前記携帯型経路案内装置(1)を携帯したユーザの歩行が歩行したものと判別する歩行検出手段(KC4″)と、
前記歩行検出手段(KC4″)の検出結果に応じて、前記経路案内画像(24)を作成する案内画像作成手段(KC17)と、
前記携帯型経路案内装置(1)を振動させる振動発生装置(M1)と、
を備えたことを特徴とする。
【0018】
特に、第3発明の携帯型経路案内装置(1)では、前記第1サンプリング周波数(fs1)および前記第2サンプリング周波数(fs2)は、一方のサンプリング周波数と他方のサンプリング周波数とが互いに整数倍ではない値に設定することができる。
【0019】
(第3発明の作用)
前記構成要件を備えた第3発明の携帯型経路案内装置(1)では、第1サンプリング加速度データ記憶手段(KC4A1)は、前記加速度センサ(SN1)の検出信号を第1サンプリング周波数(fs1)でサンプリングした第1サンプリング加速度データを記憶する。第2サンプリング加速度データ記憶手段(KC4A2)は、前記第1サンプリング周波数(fs1)とは異なる第2サンプリング周波数(fs2)で前記加速度センサ(SN1)の検出信号をサンプリングした第2サンプリング加速度データを記憶する。歩行検出手段(KC4″)は、スペクトル解析手段(KC4C″)による前記第1サンプリング加速度データの解析により歩行特有のスペクトルである歩行スペクトル(fw)が検出され且つ、前記スペクトル解析手段(KC4C″)による前記第2サンプリング加速度データの解析により前記歩行スペクトル(fw)が検出された場合に、前記携帯型経路案内装置(1)を携帯したユーザの歩行が歩行したものと判別する。
【0020】
したがって、第3発明の携帯型経路案内装置(1)では、例えば、エイリアスにより第1サンプリング加速度データの解析で振動発生装置(M1)の振動が歩行スペクトル(fw)として検出されても、第1サンプリング周波数(fs1)とは異なる第2サンプリング周波数(fs2)でサンプリングされた第2サンプリング加速度データの解析では歩行スペクトル(fw)が検出されない。逆に、エイリアスにより第2サンプリング加速度データの解析で振動発生装置(M1)の振動が歩行スペクトル(fw)として検出されても、第2サンプリング周波数(fs2)とは異なる第1サンプリング周波数(fs1)でサンプリングされた第1サンプリング加速度データの解析では歩行スペクトル(fw)が検出されない。この結果、振動発生装置(M1)による振動を歩行と誤検出することが防止される。
【0021】
(第4発明)
前記技術的課題を解決するために第4発明の携帯型経路案内装置(1)は、
出発地から目的地までの経路を案内する経路案内画像(24)を表示する表示画面(11)と、
携帯型経路案内装置(1)の加速度を検出する加速度センサ(SN1)と、
前記加速度センサ(SN1)の検出信号に基づいて携帯型経路案内装置(1)を携帯したユーザの歩行を検出する歩行検出手段(KC4)と、
前記歩行検出手段(KC4)の検出結果に応じて、前記経路案内画像(24)を作成する案内画像作成手段(KC17)と、
前記ユーザが歩行時に前記加速度センサ(SN1)で検出される歩行時周波数(fw)よりも大きな装置発生周波数(fv)で携帯型経路案内装置(1)を振動させる振動発生装置(M1)と、
前記加速度センサ(SN1)の検出信号から前記装置発生周波数(fv)の検出信号を遮断し且つ前記歩行時周波数(fw)の検出信号を通過させる周波数遮断装置(LPF)と、
を備えたことを特徴とする。
【0022】
(第4発明の作用)
前記構成要件を備えた第4発明の携帯型経路案内装置(1)では、振動発生装置(M1)は、前記ユーザが歩行時に前記加速度センサで検出される歩行時周波数(fw)よりも大きな装置発生周波数(fv)で携帯型経路案内装置(1)を振動させる。周波数遮断装置(LPF)は、前記加速度センサ(SN1)の検出信号から前記装置発生周波数(fv)の検出信号を遮断し且つ前記歩行時周波数(fw)の検出信号を通過させる。したがって、第4発明の携帯型経路案内装置(1)は、周波数遮断装置(LPF)により、装置発生周波数(fv)の振動が遮断された後、歩行時周波数(fw)に基づいて歩行の検出が行われる。この結果、第4発明の携帯型経路案内装置(1)では、装置発生周波数(fv)の振動がエイリアスにより検出されることが防止されるので、振動発生装置(M1)による振動を歩行と誤検出することが防止される。
【発明の効果】
【0023】
前述の本発明は、振動発生装置(振動モータ)による振動を、歩行と誤検出することを防止できる。
【発明を実施するための最良の形態】
【0024】
次に図面を参照しながら、本発明の実施の形態の具体例(実施例)を説明するが、本発明は以下の実施例に限定されるものではない。
【実施例1】
【0025】
図1は、本発明の携帯ナビゲーションシステムの実施例1の説明図である。
図1において、実施例1の携帯ナビゲーションシステムSは、ユーザが携帯可能な携帯端末としての携帯電話(携帯型経路案内装置)1を有する。前記携帯電話1は、携帯電話ネットワーク2を介して携帯電話事業者のデータ通信装置3と接続している。そして、前記データ通信装置3は、専用線4やインターネット6を介して、携帯ナビゲーション用データ配信サーバ(路線情報配信サーバ)7やその他の情報配信業者(コンテンツプロバイダ、アプリケーションサービスプロバイダ)の情報配信サーバ8に接続されている。なお、実施例1では、携帯ナビゲーション用データ配信サーバ7は、専用線4を介してデータ通信装置3に接続されているが、インターネット6を介して接続することも可能である。
【0026】
前記携帯電話1は、表示画像が表示される情報表示画面(表示器)11や、ユーザが各種入力を行う入力キー12を有し、内部にプログラム等が記録された記憶装置(記録媒体)を備えている。実施例1の携帯電話1は、携帯電話の現在位置を三次元側位可能なGPS(Global Positioning System、全地球無線側位システム)装置を内蔵している。
また、前記携帯ナビゲーション用データ配信サーバ7も、サーバ本体16及びディスプレイ(図示せず)、キーボードやマウス等の入力装置(図示せず)、ハードディスクドライブ(記録媒体、図示せず)、CDドライブ等の光学ドライブ(記録媒体読み取り装置、図示せず)等を有している。
【0027】
(携帯電話1の制御部の説明)
図2は前記図1に示す携帯ナビゲーションシステムの携帯端末の機能をブロック図(機能ブロック図)で示した図である。
図2において、携帯電話1のコントローラKCは、外部との信号の入出力および入出力信号レベルの調節等を行うI/O(入出力インターフェース)、必要な処理を行うためのプログラムおよびデータ等が記憶されたROM(リードオンリーメモリ、記録媒体)、必要なデータを一時的に記憶するためのRAM(ランダムアクセスメモリ、記録媒体)、ROM等に記憶されたプログラムに応じた処理を行うCPU(中央演算処理装置)、ならびにクロック発振器等を有するマイクロコンピュータにより構成されており、前記ROM等に記憶されたプログラムを実行することにより種々の機能を実現することができる。
【0028】
(携帯電話のコントローラKCに接続された信号入力要素)
前記携帯電話1のコントローラKCは、前記入力キー12やGPS装置、加速度検出装置13、その他の信号入力要素からの信号が入力されている。
前記入力キー12は、ユーザにより入力された入力信号を検出して、その検出信号をコントローラKCに入力する。
前記GPS装置は、側位開始の入力信号に応じて、衛星から発射された時刻信号の電波の到達時間等から地球上の携帯電話1の位置を側位し、側位結果をコントローラKCに入力する。
【0029】
前記加速度検出装置13は、加速度センサSN1と、ローパスフィルタ(周波数遮断装置)LPFと、加速度サンプリング手段KC0とを有している。
前記加速度センサSN1は、携帯電話1の移動時の加速度(ユーザ歩行時には歩行に伴う体動による振動等)を検出する。実施例1の加速度センサSN1は、携帯電話1に対して固定された直交する所定の3軸(X,Y,Z軸)方向の加速度を検出する。なお、前記直交する3軸方向の加速度を検出可能な3次元加速度センサは、従来公知(例えば、特許第3359781号明細書等参照)であり、種々のセンサを使用できるので、詳細な説明は省略する。
【0030】
前記ローパスフィルタLPFは、予め設定された遮断周波数(カットオフ周波数)fcoを有し、前記加速度センサから出力された検出信号から、遮断周波数以下の検出信号を通過させ、遮断周波数以上の検出信号を遮断(減衰)させる。なお、実施例1のローパスフィルタLPFは、前記遮断周波数fcoが32Hzに設定されている。
前記加速度サンプリング手段KC0は、前記ローパスフィルタLPFを通過した検出信号を、予め設定されたサンプリング周波数fsでサンプリング(アナログ−デジタル変換)する。なお、実施例1の加速度サンプリング手段KC0は、サンプリング周波数fsが64Hzに設定されている。即ち、実施例1の携帯電話1では、ローパスフィルタLPFの遮断周波数fcoが、サンプリング周波数fsの1/2(即ち、ナイキスト周波数)に設定されている。
【0031】
(携帯電話のコントローラKCに接続された制御要素)
また、携帯電話1のコントローラKCは、液晶駆動回路KD1、スピーカ駆動回路KD2、振動モータ制御回路(振動発生装置制御回路)KD3や図示しない電源回路、その他の制御要素に接続されており、それらの作動制御信号を出力している。
前記液晶駆動回路KD1は、液晶表示パネルの表示用電極のオン・オフを制御して情報表示画面11に表示画像を表示する。
前記GPS駆動回路KD2は、前記GPS装置に側位開始の信号を出力してGPS装置を駆動する。
振動モータ制御回路KD3は、電話の着信時や経路案内中にガイダンスポイントに到着する場合等に、振動モータ(振動発生装置)M1を所定の装置発生周波数(バイブレーション周波数)fvで作動させて、携帯電話1を振動させ、ユーザに告知する。なお、実施例1の振動モータ制御回路KD3は、前記振動モータM1が130Hz(装置発生周波数fv)で振動するように制御する。即ち、実施例1の携帯電話1では、装置発生周波数fv(=130Hz)が遮断周波数fco(32Hz)より大きな値に設定されている。
【0032】
(携帯電話のコントローラKCの機能)
携帯電話1のコントローラKCは、前記各信号出力要素からの出力信号に応じた処理を実行して、前記各制御要素に制御信号を出力する機能(制御手段)を有している。前記コントローラKCの機能(制御手段)を次に説明する。
KC1:液晶駆動回路制御手段(経路案内画像表示手段)
液晶駆動回路制御手段KC1は、液晶駆動回路KD1を制御して、情報表示画面11に画像を表示する。
KC2:振動モータ制御手段(振動発生装置制御手段)
振動モータ制御手段KC2は、振動モータ制御回路KD3を介して振動モータM1の駆動を制御する。
KC3:GPS制御手段
GPS制御手段KC3は、前記GPS駆動回路KD2を介してGPS装置を駆動する。
【0033】
KC4:歩行検出手段(歩行検出プログラム)
歩行検出手段KC4は、加速度データ記憶手段KC4Aと、スペクトル解析実行間隔記憶手段KC4B″と、スペクトル解析実行間隔計測タイマTM0と、スペクトル解析手段KC4Cと、解析結果記憶手段KC4Dと、歩行判別手段KC4Eとを有し、前記加速度検出装置13から出力される検出信号に基づいて、携帯電話1を携帯したユーザの歩行を検出する。
KC4A:加速度データ記憶手段
加速度データ記憶手段KC4Aは、前記加速度検出装置13の加速度サンプリング手段KC0でサンプリングされた加速度データを読取り、記憶する。なお、実施例1の加速度データ記憶手段KC4Aは、0.5秒間分の加速度データ、即ち、64Hzのサンプリング周波数でサンプリングされた加速度データを32個記憶可能に構成され、最新の加速度データを読取ると、最も古い加速度データを消去して最新の加速度データを記憶する。
【0034】
KC4B:スペクトル解析実行間隔記憶手段
スペクトル解析実行間隔記憶手段KC4Bは、スペクトル解析を実行する間隔であるスペクトル解析実行間隔t0を記憶する。実施例1のスペクトル解析実行間隔記憶手段KC4Bは、スペクトル解析実行間隔t0として、0.5秒を記憶している。
TM0:スペクトル解析実行間隔計測タイマ
スペクトル解析実行間隔計測タイマTM0は、前記スペクトル解析実行間隔t0がセットされ、スペクトル解析実行間隔t0が経過するとタイムアップする。
【0035】
KC4C:スペクトル解析手段
スペクトル解析手段KC4Cは、前記加速度データ記憶手段KC4Aに記憶された加速度データに基づいて、加速度の大きさ(総合加速度)を演算した後、高速フーリエ変換(FFT:Fast Fourier Transform)によりスペクトル(パワースペクトル)の解析を行う。なお、実施例1の高速フーリエ変換KC4Cは、1Hz〜32Hzの範囲で1Hz毎にスペクトル強度を求める。なお、FFTは2n個のデータが必要であるが、実施例1では32個(25個)の加速度データに基づいて、FFTを行う。
KC4D:解析結果記憶手段
解析結果記憶手段KC4Dは、前記高速フーリエ変換KC4Cでのスペクトル解析の結果を記憶する。
【0036】
KC4E:歩行判別手段
歩行判別手段KC4Eは、前記解析結果記憶手段KC4Dに記憶されたスペクトル解析の結果から、歩行特有のスペクトルである歩行スペクトル(歩行時周波数)fwが検出されたか否かの判別を行う。実施例1の歩行判別手段KC4Eは、スペクトル解析の結果、1Hz〜4Hzの間にスペクトル強度がスペクトル強度閾値Ns(実施例1ではNs=1.0)以上のものが計測された場合に歩行と判別する。
KC11:経路案内手段(経路案内プログラム)
経路案内手段KC11は、経路探索条件入力画像作成手段KC12と、端末側データ送信手段KC13と、端末側データ受信手段KC14と、現在位置検出手段KC15と、ガイダンスポイント判別手段KC16と、経路案内画像作成手段KC17と、を有し、GPSからの信号や歩行の検出等に応じて、情報表示画面11に経路案内画像等を表示して経路の案内を行う。
【0037】
図3は実施例1の経路探索条件画像の説明図である。
KC12:経路探索条件入力画像作成手段
経路検索条件入力画像作成手段KC12は、経路検索条件記憶手段KC12Aを有し、情報表示画面11に出発地及び目的地を含む経路探索条件を入力するための経路検索条件入力画像(図3参照)を作成し、情報表示画面11に表示する。図3において、実施例1の経路検索条件入力画像には、出発地を入力するための出発地入力欄、目的地を入力するための目的地入力欄、経路案内の出発日時または到着日時を入力するための日時入力欄、検索する経路の数を入力するための検索経路入力欄、経路案内時に利用する交通手段を入力するための交通手段入力欄、および、サーバ7へ検索条件の送信を実行するための検索条件送信アイコンが表示されている。
【0038】
KC12A:経路検索条件記憶手段
経路検索条件記憶手段KC12Aは、前記経路検索条件入力画像(図3参照)への入力により設定された経路検索条件(出発地や目的地、出発日時等)を記憶する。
KC13:端末側データ送信手段
端末側データ送信手段KC13は、探索条件送信手段KC13Aを有し、携帯電話(携帯端末)1からサーバ7へデータを送信する。
KC13A:探索条件送信手段
探索条件送信手段KC13Aは、前記経路探索条件記憶手段KC12Aに記憶された経路探索条件をサーバ7に送信する。
【0039】
KC14:端末側データ受信手段
端末側データ受信手段KC14は、地図データ記憶手段KC14Aと、経路案内データ記憶手段KC14Bとを有し、サーバ7から送信されたデータを受信し、記憶する。
KC14A:地図データ記憶手段
地図データ記憶手段KC14Aは、前記サーバ7から送信された地図データを記憶する。
KC14B:経路案内データ記憶手段
経路案内データ記憶手段KC14Bは、前記経路探索条件に応じて前記サーバ7から送信された経路案内データを記憶する。実施例1の経路案内データ記憶手段KC14Bが記憶する経路案内データには、ユーザをナビゲーションする経路のデータや、曲がり角や目的地等のガイダンスポイントのデータが含まれる。
【0040】
KC15:現在位置検出手段
現在位置検出手段KC15は、現在位置記憶手段KC15Aと、歩行速度記憶手段KC15Bと、移動距離演算手段KC15Cとを有し、GPS装置からの出力信号や歩行の判別に基づいて、携帯電話1を携帯したユーザの現在位置を検出する。
KC15A:現在位置記憶手段
現在位置記憶手段KC15Aは、携帯電話1の現在位置を記憶する。
KC15B:歩行速度記憶手段
歩行速度記憶手段KC15Bは、ユーザが歩行する場合の歩行速度を記憶する。なお、実施例1の歩行速度記憶手段KC15Bは、ユーザの歩行速度として、80m/分を記憶している。
【0041】
KC15C:移動距離演算手段
移動距離演算手段KC15Cは、歩行が検出された場合に、歩行時間(歩行の判別を行った期間、実施例1では0.5秒間)と歩行速度とに基づいて、ユーザの現在位置からの経路に沿った移動距離を演算する。
KC16:ガイダンスポイント判別手段
ガイダンスポイント判別手段KC16は、前記経路案内データ記憶手段KC14Bに記憶されたガイダンスポイントのデータに基づいて、現在位置検出手段KC15で検出された現在位置が、ガイダンスポイントであるか否かを判別する。
【0042】
図4は経路案内画像の説明図であり、図4Aは経路案内を開始した場合の経路案内画像の説明図、図4Bは経路上を歩行している場合の経路案内画像の説明図、図4Cはガイダンスポイントで停止した場合の経路案内画像の説明図、図4Dは目的地に近づいた場合の経路案内画像の説明図である。
KC17:経路案内画像作成手段
経路案内画像作成手段KC17は、ユーザの現在位置や地図データ、経路のデータ、ガイダンスポイントであるか否かの判別データ等に基づいて、ユーザのナビゲーションを行うための経路案内画像(図4参照)を作成して、情報表示画面11に表示する。図4において、実施例1の経路案内画像作成手段KC17は、地図画像21、経路画像22および人型の現在位置表示用アイコン23を有する経路案内画像24を作成する。なお、ユーザの現在位置に応じて、出発地アイコン26(図4A参照)や目的地アイコン27(図4D参照)を経路案内画像24に追加したり、経路の曲がる方向を示す曲がり角表示アイコン28を追加する。また、ユーザの歩行が検出された場合、人型の現在位置表示用アイコン23として、歩行中であることを示す背中を向けた現在位置表示用アイコン23a(図4B、図4D参照)が表示され、ユーザの歩行が検出されていない場合(即ち、停止している場合)、停止中であることを示す正面向きの現在位置表示用アイコン23b(図4A、図4C参照)が表示される。
【0043】
(携帯ナビゲーション用データ配信サーバ7の制御部の説明)
図5は実施例1の携帯ナビゲーションシステムのサーバの機能をブロック図(機能ブロック図)で示した図である。
図5において、携帯ナビゲーション用データ配信サーバ7のコントローラSCは、外部との信号の入出力および入出力信号レベルの調節等を行うI/O(入出力インターフェース)、必要な処理を行うためのプログラムおよびデータ等が記憶されたROM(リードオンリーメモリ、ハードディスク等の記録媒体)、必要なデータを一時的に記憶するためのRAM(ランダムアクセスメモリ、記録媒体)、ROM等に記憶されたプログラムに応じた処理を行うCPU(中央演算処理装置)、ならびにクロック発振器等を有するマイクロコンピュータにより構成されており、前記ROM等に記憶されたプログラムを実行することにより種々の機能を実現することができる。
【0044】
(サーバのコントローラSCに接続された信号入力要素)
前記携帯ナビゲーション用データ配信サーバ7のコントローラSCは、キーボードやマウス等の入力装置(図示せず)やその他の信号入力要素からの信号が入力されている。
前記入力装置は、ユーザによりそれらが入力されたことを検出して、その検出信号をコントローラSCに入力する。
【0045】
(サーバのコントローラSCに接続された制御要素)
また、携帯ナビゲーション用データ配信サーバ7のコントローラSCは、ディスプレイ(図示せず)や図示しない電源回路、その他の制御要素に接続されており、それらの作動制御信号を出力している。
前記ディスプレイには、サーバの使用者の操作に応じた表示画像が表示される。
【0046】
(サーバのコントローラSCの機能)
携帯ナビゲーション用データ配信サーバ7のコントローラSCは、携帯電話1から送信された各データの処理を行う携帯ナビゲーション用アプリケーションプログラムAP4や、その他のプログラム等を有しており、前記各信号出力要素等からの出力信号に応じた処理を実行して、前記各制御要素等に制御信号を出力する機能(制御手段)を有している。次に、前記コントローラSCの携帯ナビゲーション用アプリケーションプログラムAP4の機能(制御手段)を説明する。
【0047】
SC1:サーバ側データ受信手段
サーバ側データ受信手段SC1は、探索条件受信手段SC1Aを有し、携帯電話1から送信されたデータを受信する。
SC1A:探索条件受信手段
探索条件受信手段SC1Aは、携帯電話1から送信された前記探索条件データを受信し、記憶する。
SC2:地図データ記憶手段
地図データ記憶手段SC2は、地図データを記憶する。実施例1の地図データ記憶手段SC2に記憶された地図データは、緯度・経度に基づいて所定の範囲の単位地図に分割した単位地図データにより構成されている。なお、地図を単位地図に分割し、必要な単位地図データを送受信する技術は従来公知(例えば、特開2003−214860号公報等参照)であるので、詳細な説明は省略する。また、実施例1の地図データは、道路や通路等がベクターデータで構成されたベクタ地図データが使用されている。
【0048】
SC3:経路探索手段
経路探索手段SC3は、ガイダンスポイント抽出手段SC3Aを有し、受信した前記経路探索条件に応じて、前記出発地を出発してから前記目的地に到着するまでの経路を決定(探索)し、前記出発地の位置を示す出発地位置データと、前記目的地の位置を示す目的地位置データとを含む最適な経路のデータ(経路データ)を作成する。なお、経路検索条件において、交通機関を利用することが指定されている場合、交通機関を含めた最適経路が作成され、検索する経路の数が複数指定されている場合には、指定された数に応じた複数の経路を作成する。なお、前記最適経路を作成する技術は、従来公知であるので(例えば、特開2003−214860号公報等参照)、詳細な説明は省略する。
SC3A:ガイダンスポイント抽出手段
ガイダンスポイント抽出手段SC3Aは、経路探索手段で探索された各経路上において、曲がり角や目的地のようなガイダンスを行うポイント(ガイダンスポイント)を抽出する(検索し、設定する)。なお、前記ガイダンスポイントを抽出する技術は、例えば、本出願人の先願である特願2003−369314号記載の技術等を採用することができるので、詳細な説明は省略する。
【0049】
SC4:サーバ側データ送信手段
サーバ側データ送信手段SC4は、経路データ送信手段SC4Aと、地図データ送信手段SC4Bとを有し、携帯電話1にデータを送信する。
SC4A:経路案内データ送信手段
経路案内データ送信手段SC4Aは、前記経路探索手段SC4により探索された経路データやガイダンスポイントのデータを含む経路案内データを携帯電話1に送信する。
SC4B:地図データ送信手段
地図データ送信手段SC4Bは、前記経路探索手段SC4により探索された経路上の地図データを携帯電話1に送信する。
【0050】
(フローチャートの説明)
(サーバのフローチャートの説明)
図6は実施例1の携帯ナビゲーションシステムのサーバの案内経路作成処理のメインフローチャートである。
図6のフローチャートの各ST(ステップ)の処理は、サーバ7のコントローラSCのROM等に記憶された携帯ナビゲーション用プログラムAP4に従って行われる。また、この処理はサーバ7の他の各種処理と並行して実行される。
【0051】
図6に示すフローチャートは携帯ナビゲーション用データ配信サーバ7の電源オンにより開始される。
図6のST1において、携帯電話1から送信された経路探索条件のデータを受信したか否かを判別する。イエス(Y)の場合はST2に移り、ノー(N)の場合はST1を繰り返す。
ST2において、前記経路探索条件に応じた経路の探索を行う。そして、ST3に移る。
ST3において、前記探索された経路上のガイダンスポイントを抽出する。そして。ST4に移る。
ST4において、携帯電話(携帯端末)1に経路データ、ガイダンスポイントのデータおよび経路上の地図データを送信する。そして、ST1に戻る。
【0052】
(携帯端末のフローチャートの説明)
(経路案内処理のフローチャートの説明)
図7は実施例1の携帯ナビゲーションシステムの携帯電話が備えている経路案内処理のフローチャートである。
図7のフローチャートの各ST(ステップ)の処理は、前記コントローラKCのROM等に記憶されたプログラムに従って行われる。また、この処理は携帯電話1の他の各種処理と並行して実行される。
図7に示す経路案内処理のフローチャートは、ナビゲーションプログラム(経路案内プログラム)の起動により開始される。
【0053】
図7のST11において、情報表示画面11に経路探索条件入力画像(図3参照)を表示する。そして、ST12に移る。
ST12において、経路探索条件入力画像の「探索開始」の探索条件送信アイコンを選択する入力がされたか否かを判別する。ノー(N)の場合はST13に移り、イエス(Y)の場合はST15に移る。
ST13において、そのほかの入力、即ち、図3に示す経路探索条件入力画像の各入力欄(目的地等)への入力があったか否かを判別する。イエス(Y)の場合はST14に移り、ノー(N)の場合はST12に戻る。
ST14において、前記ST13でのユーザの入力に応じて図3に示す経路探索条件入力画像を更新する。そしてST12に戻る。
【0054】
ST15において、ユーザが入力した経路探索条件のデータを経路案内データ配信サーバ7に送信する。そして、ST16に移る。
ST16において、経路探索結果である経路案内データ(経路データおよびガイダンスポイントのデータ)や、地図データを受信したか否かを判別する。イエス(Y)の場合はST17に移り、ノー(N)の場合はST16を繰り返す。
ST17において、受信した経路探索結果の経路案内データおよび地図データを記憶する。そして、ST18に移る。
ST18において、出発地、経路データおよび地図データに基づいて、経路案内画像(図4A参照)を作成する。そして、ST19に移る。
【0055】
ST19において、GPS装置からの出力信号を受信したか否かを判別する。イエス(Y)の場合はST20に移り、ノー(N)の場合はST21に移る。
ST20において、受信したGPSの出力信号(データ)に基づいて、現在位置を更新する。そして、ST23に移る。
ST21において、ユーザの歩行が検出されたか否かを判別する。イエス(Y)の場合はST22に移り、ノー(N)の場合はST23に移る。
ST22において、次の処理(1)、(2)を実行して、ST23移る。
(1)歩行時間(スペクトル解析(歩行の検知)を行った期間、実施例1では0.5秒間)と、歩行速度とに基づいて、移動距離を演算する。
(2)演算した移動距離と、歩行前の現在位置とに基づいて、現在位置を更新する。
【0056】
ST23において、現在位置のデータ、経路データ、地図データ、歩行の状態(歩行中か、停止中か)に基づいて、経路案内画像(図4参照)を更新する。そして、ST24に移る。
ST24において、現在位置のデータと、ガイダンスポイントのデータとに基づいて、現在位置がガイダンスポイントであるか否かを判別する。イエス(Y)の場合はST25に移り、ノー(N)の場合はST26に移る。
ST25において、振動モータM1を所定時間作動させて、ガイダンスポイントに到達したことをユーザに告知する。そして、ST26に移る。
ST26において、ナビゲーションプログラム(経路案内プログラム)が終了する入力がされたか否かを判別する。ノー(N)の場合はST19に戻り、イエス(Y)の場合は図7の経路案内処理を終了する。
【0057】
(歩行検知処理のフローチャートの説明)
図8は実施例1の携帯ナビゲーションシステムの携帯電話が備えている歩行検知処理のフローチャートである。
図8のフローチャートの各ST(ステップ)の処理は、前記コントローラKCのROM等に記憶されたプログラムに従って行われる。また、この処理は携帯電話1の他の各種処理(前記経路案内処理等)と並行して実行される。
図8に示すフローチャートは、ナビゲーションプログラム(経路案内プログラム)の起動により開始される。
【0058】
図8のST31において、加速度検出装置13から出力された加速度データの読取り、記憶を開始する。そして、ST32に移る。
ST32において、スペクトル解析実行間隔計測タイマTM0にスペクトル解析実行間隔t0をセットする。そして、ST33に移る。
ST33において、スペクトル解析実行間隔計測タイマTM0がタイムアップしたか否かを判別する。ノー(N)の場合はST33を繰り返し、イエス(Y)の場合はST34に移る。
ST34において、記憶されている加速度データに基づいて、加速度の大きさを演算した後、高速フーリエ変換(FFT)によりスペクトル解析を行う。そして、ST35に移る。
【0059】
ST35において、FFTの解析結果から、1Hz〜4Hzの範囲内に、スペクトル強度閾値Ns以上のスペクトル強度を持つスペクトルが検出されたか否かを判別する。イエス(Y)の場合はST36に移り、ノー(N)の場合はST37に移る。
ST36において、ユーザが歩行したものと判別する。即ち、歩行を検知する。そして、ST38に移る。
ST37において、ユーザが歩行をしていない、即ち、停止していると判別する。そして、ST38に移る。
ST38において、ナビゲーションプログラム(経路案内プログラム)が終了する入力がされたか否かを判別する。ノー(N)の場合はST32に戻り、イエス(Y)の場合は図8の歩行検知処理を終了する。
【0060】
(実施例1の作用)
図9は実施例1の携帯端末を携帯したユーザが歩行中に携帯電話で計測された加速度データの一例の説明図であり、縦軸に加速度の値、横軸に時間をとった説明図である。
図10は図9の加速度データのスペクトル解析結果を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
図9、図10において、前記構成を備えた実施例1の携帯ナビゲーションシステムSでは、携帯電話1を携帯したユーザが歩行すると、3軸の加速度センサSN1により、X軸、Y軸、Z軸の3軸方向に周期的な加速度が検出される。前記加速度センサSN1で検出された周期的な加速度のデータは、ローパスフィルタLPFを通過する際に32Hzより大きな周波数の加速度データが遮断され、64Hzのサンプリング周波数でサンプリングされる(図9参照)。そして、前記3軸方向の加速度の大きさである総合加速度(図9参照)の0.5秒間分を高速フーリエ変換(FFT)でスペクトル解析すると、図10に示すように、2Hz、3Hzにおいてスペクトル強度が強いという解析結果が得られる。このような解析結果が得られた場合、ユーザが歩行したものと判別され、携帯電話1は歩行を検知する。
【0061】
一方、ガイダンスポイントや通話の着信時等に、振動モータM1が振動しても、振動モータM1は130Hzで振動するため、加速度センサSN1で振動を検出しても、ローパスフィルタLPFによりサンプリングされる前に遮断される。この結果、サンプリングされた加速度データには、振動モータM1の周波数の振動がエイリアスにより検出されることが防止されるので、振動モータM1が振動した場合に、歩行と誤検出することが防止される。したがって、実施例1の携帯電話は精度良く歩行を検出できるので、ユーザが停止中に振動モータM1の振動により歩行を誤検出して、携帯電話1が検出している現在位置と、ユーザの実際の現在位置とがずれることを低減できる。
【実施例2】
【0062】
次に本発明の実施例2の携帯ナビゲーションシステムSの説明を行うが、この実施例2の説明において、前記実施例1の構成要素に対応する構成要素には同一の符号を付して、その詳細な説明を省略する。
この実施例2は、下記の点で前記実施例1と相違しているが、他の点では前記実施例1と同様に構成されている。
(携帯電話1の制御部の説明)
図11は実施例2の携帯電話1の制御部分が備えている各機能をブロック図(機能ブロック図)で示した図であり、実施例1の図2に対応する図である。
図11において、実施例2の携帯ナビゲーションシステムSの携帯電話1では、加速度検出装置13′は、実施例1の加速度検出装置13からローパスフィルタLPFが省略されている。そして、実施例2の加速度サンプリング手段KC0は、実施例1と同様に、サンプリング周波数fsが64Hzでサンプリングを行う。また、実施例2の携帯電話1では、振動モータM1として、設定値が150Hzで公差(設計誤差や製造誤差等)が±8Hz、即ち、142Hz〜158Hzの装置発生周波数fvで振動する振動モータM1を選定する。また、実施例2の携帯電話1では、実施例1と異なり、スペクトル解析実行間隔t0が1秒に設定されており、1秒間分(即ち64個)の加速度データに基づいて、スペクトル解析を行っている。
【0063】
(実施例2の作用)
図12は、実施例2の携帯電話1において、発生した周波数と、エイリアスとして観測される周波数との関係を説明する説明図であり、縦軸にエイリアスとして観測される周波数、横軸に発生した周波数をとった説明図である。
前記構成を備えた実施例2の携帯電話1では、サンプリング周波数が64Hzに設定されているので、ナイキスト周波数(=64Hz/2=32Hz)ごとに特異点が現れる。即ち、図12に示すように、64Hz,96Hz,128Hz,160Hz、…の振動が発生した場合、64Hzでサンプリングを行うと、波の節の部分を常に観測するため、観測結果は、常に止まっているかのように見える。そして、65Hz〜95Hzの間の振動が発生した場合、エイリアスにより、1Hz〜31Hzの振動として観測され、97Hz〜127Hzの間の振動が発生した場合、31Hz〜1Hzの振動として観測される。以下同様にして、129Hz〜159Hzの振動が発生した場合には1Hz〜31Hz、161Hz〜191Hzの振動が発生した場合には31Hz〜1Hzの振動として観測される。
【0064】
したがって、振動モータM1の装置発生周波数fvを、ナイキスト周波数(=fs/2)の整数倍に設定すれば、振動モータM1の振動は観測されないので、歩行の検出に影響を与えない。しかしながら、設計誤差や製造誤差等により振動モータM1の振動数fvにはばらつきがある。したがって、例えば、装置発生周波数fvをサンプリング周波数fsの整数倍に設定した場合、サンプリング周波数fsの整数倍からわずか2Hzずれてしまうと、エイリアスにより歩行特有のスペクトル2Hz(=fw)が観測されてしまう。
しかしながら、実施例2の携帯電話1では、装置発生周波数fvが142Hz〜158Hzの振動モータM1が選定されているので、振動モータM1の振動は、14Hz〜30Hzの振動として観測される。
【0065】
図13は、実施例2の携帯電話において、ユーザが歩行中にバイブレーションが発生した時に観測された振動波形のグラフであり、縦軸に総合加速度(3軸合成加速度)、横軸に時間を取ったグラフである。
図14は実施例1の図10に対応するスペクトル解析結果を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
図13において、歩行中に振動モータM1が作動した時に2秒間分サンプリングを行うと、図13に示すような波形が観測される。そして、図13に示す加速度データに基づいて、FFTによりスペクトル解析を行うと、図14に示すように、2Hzと22Hzに強いスペクトルが観測される。
【0066】
したがって、振動モータM1の振動は、22Hz付近に観測され、歩行のスペクトルfw(1〜4Hz)とは分離されて観測される。この結果、振動モータM1の振動が歩行特有のスペクトルfw(=1Hz〜4Hz)として観測されることが防止され、振動モータM1により歩行を誤検知することが防止できる。また、実施例2の携帯電話1は、実施例1の携帯電話1に比べ、ローパスフィルタLPFが省略されているので、部品点数が少なくなり、低コスト化できる。
なお、実施例2の携帯電話1の振動モータM1は、装置発生周波数fvが150Hz±8Hzのものを選定したが、これに限定されず、mを整数とした場合に、エイリアスにより観測される周波数である|fs×m−fv|が歩行特有のスペクトル(歩行スペクトル)fwと一致しない範囲、即ち、|fs×m−fv|≠fwを満足する範囲で設定することができる。
【実施例3】
【0067】
次に本発明の実施例3の携帯ナビゲーションシステムSの説明を行うが、この実施例3の説明において、前記実施例1、2の構成要素に対応する構成要素には同一の符号を付して、その詳細な説明を省略する。
この実施例3は、下記の点で前記実施例1、2と相違しているが、他の点では前記実施例1、2と同様に構成されている。
【0068】
(携帯電話1の制御部の説明)
図15は実施例3の携帯電話1の制御部分が備えている各機能をブロック図(機能ブロック図)で示した図であり、実施例1の図2に対応する図である。
図15において、実施例3の加速度検出装置13″は、実施例2の加速度検出装置13′と同様に、ローパスフィルタLPFが省略されている。また、実施例3の加速度サンプリング手段KC0″は、第1加速度サンプリング手段KC0Aと、第2加速度サンプリング手段KC0Bとを有している。
前記第1加速度サンプリング手段KC0Aは、加速度センサSN1から出力された出力信号を予め設定された第1サンプリング周波数fs1でサンプリングし、第2加速度サンプリング手段KC0Bは、予め設定された第2サンプリング周波数fs2でサンプリングする。なお、実施例3の加速度サンプリング手段KC0では、第1サンプリング周波数fs1が64Hzに設定され、第2サンプリング周波数fs2が50Hzに設定されている。なお、実施例3の振動モータM1として、実施例1の振動モータM1と同様に、130Hz(装置発生周波数fv)で振動するモータが使用される。
【0069】
(携帯電話1のコントローラKCの機能)
図11において、実施例3の携帯電話1のコントローラKCは、実施例1のコントローラKCの歩行検出手段KC4とは異なる歩行検出手段KC4″を有している。前記歩行検出手段KC4″は、加速度データ記憶手段KC4A″と、スペクトル解析実行間隔記憶手段KC4B″と、スペクトル解析実行間隔計測タイマTM0と、スペクトル解析開始時間記憶手段KC4F″と、スペクトル解析開始時間計測タイマTM1と、スペクトル解析手段KC4C″と、解析結果記憶手段KC4D″と、歩行判別手段KC4E″とを有している。そして、前記歩行検出手段KC4″は、前記加速度検出装置13″から出力される検出信号に基づいて、携帯電話1を携帯したユーザの歩行を検出する。
【0070】
KC4A″:加速度データ記憶手段
加速度データ記憶手段KC4A″は、前記第1加速度サンプリング手段KC0Aでサンプリングされた第1サンプリング加速度データを読取り、記憶する第1サンプリング加速度データ記憶手段KC4A1と、前記第2加速度サンプリング手段KC0Bでサンプリングされた第2サンプリング加速度データを読取り、記憶する第2サンプリング加速度データ記憶手段KC4A2と、を有する。なお、実施例3の加速度データ記憶手段KC4A″は、第1加速度サンプリング手段KC0Aにより64Hzの第1サンプリング周波数fs1でサンプリングされた加速度データを64個(=26個)記憶可能に構成され、第2サンプリング加速度データ記憶手段KC4A2は、第2加速度サンプリング手段KC0Bにより50Hzの第2サンプリング周波数fs2でサンプリングされた加速度データを64個記憶可能に構成されている。
【0071】
KC4B″:スペクトル解析実行間隔記憶手段
スペクトル解析実行間隔記憶手段KC4B″は、スペクトル解析を実行する間隔であるスペクトル解析実行間隔t0を記憶する。実施例3のスペクトル解析実行間隔記憶手段KC4B″は、スペクトル解析実行間隔t0として、1秒を記憶している。
TM0:スペクトル解析実行間隔計測タイマ
スペクトル解析実行間隔計測タイマTM0は、前記スペクトル解析実行間隔t0がセットされ、スペクトル解析実行間隔t0が経過するとタイムアップする。
KC4F″:スペクトル解析開始時間記憶手段
スペクトル解析開始時間記憶手段KC4F″は、最初にスペクトル解析を開始するまでの時間であるスペクトル解析開始時間t1を記憶する。実施例3のスペクトル解析開始時間t1は、50Hzでサンプリングされた第2サンプリング加速度データが64個記憶されるまでに必要な時間である1.28秒に設定されている。
TM1:スペクトル解析開始時間計測タイマ
スペクトル解析開始時間計測タイマTM1は、前記スペクトル解析開始時間t1がセットされ、スペクトル解析開始時間t1が経過するとタイムアップする。
【0072】
KC4C″:スペクトル解析手段
スペクトル解析手段KC4C″は、前記加速度データ記憶手段KC4A″に記憶された第1サンプリング加速度データおよび第2サンプリング加速度データについて、それぞれ加速度の大きさ(総合加速度)を演算した後、高速フーリエ変換(FFT)によりスペクトル解析を行う。なお、実施例3のスペクトル解析手段KC4C″は、第1サンプリング加速度データについては0Hz〜32Hzの範囲で64個のスペクトル値(0.5Hz毎)に対してスペクトル強度を求め、第2サンプリング加速度データについては、0Hz〜25Hz(=50Hz/2=ナイキスト周波数)の範囲で64個のスペクトル値(約0.39Hz毎)に対してスペクトル強度を求める。
【0073】
KC4D″:解析結果記憶手段
解析結果記憶手段KC4D″は、前記高速フーリエ変換KC4C″でのスペクトル解析の結果を記憶する。
KC4E″:歩行判別手段
歩行判別手段KC4E″は、前記解析結果記憶手段KC4D″に記憶されたスペクトル解析の結果から、歩行特有のスペクトルである歩行スペクトルが検出されたか否かの判別を行う。実施例3の歩行判別手段KC4E″は、スペクトル解析の結果、第1サンプリング加速度データの解析により1.5Hz〜4Hzの間にスペクトル強度がスペクトル強度閾値Ns(実施例3ではNs=1.0)以上のものが計測され、且つ、第2サンプリング加速度データの解析により同様に1.5Hz〜4Hzの間にスペクトル強度がスペクトル強度閾値Ns以上のものが計測された場合に、歩行と判別する。
【0074】
(携帯端末(携帯電話)のフローチャートの説明)
(歩行検知処理のフローチャートの説明)
図16は実施例3の携帯ナビゲーションシステムの携帯電話が備えている歩行検知処理のフローチャートであり、実施例1の図8に対応する図である。
図16のフローチャートの各ST(ステップ)の処理は、前記コントローラKCのROM等に記憶されたプログラムに従って行われる。また、この処理は携帯電話1の他の各種処理(前記経路案内処理等)と並行して実行される。なお、図16のフローチャートの説明において、実施例1の歩行検知処理と同様の処理には同一のST番号を付し、詳細な説明は省略する。なお、実施例3の携帯ナビゲーションシステムSにおいて、サーバ7の案内経路作成処理(図6参照)や携帯電話1の経路案内処理(図7参照)は、実施例1の各処理と同様の処理が実行されるので、詳細な説明は省略する。
【0075】
図16に示すフローチャートは、ナビゲーションプログラム(経路案内プログラム)の起動により開始される。
図16のST51において、加速度検出装置13″から出力された第1サンプリング加速度データおよび第2サンプリング加速度データの読取り、記憶を開始する。そして、ST52に移る。
ST52において、スペクトル解析開始時間計測タイマTM1にスペクトル解析開始時間t1をセットする。そして、ST53に移る。
ST53において、スペクトル解析開始時間計測タイマTM1がタイムアップしたか否かを判別する。ノー(N)の場合はST53を繰り返し、イエス(Y)の場合はST34″に移る。
ST34″において、次の処理(1)、(2)を実行して、ST35Aに移る。
(1)記憶した第1サンプリング加速度データに基づいて、加速度の大きさを演算した後、高速フーリエ変換(FFT)によりスペクトル解析を行う。
(2)記憶した第2サンプリング加速度データに基づいて、加速度の大きさを演算した後、高速フーリエ変換(FFT)によりスペクトル解析を行う。
【0076】
ST35Aにおいて、第1サンプリング加速度データのFFTの解析結果から、1.5Hz〜4Hzの範囲内に、スペクトル強度閾値Ns以上のスペクトル強度を持つスペクトルが検出されたか否かを判別する。イエス(Y)の場合はST35Bに移り、ノー(N)の場合はST37に移る。
ST35Bにおいて、第2サンプリング加速度データのFFTの解析結果から、1.5Hz〜4Hzの範囲内に、スペクトル強度閾値Ns以上のスペクトル強度を持つスペクトルが検出されたか否かを判別する。イエス(Y)の場合はST36に移り、ノー(N)の場合はST37に移る。
次に、実施例1の歩行検知処理(図8参照)と同様のST36,ST37を実行して、ST54に移る。
【0077】
ST54において、ST32と同様にスペクトル解析実行間隔計測タイマTM0にスペクトル解析間隔t0をセットする。そして、ST38に移る。
次に、実施例1の歩行検知処理(図8参照)と同様のST38の判別処理を実行する。ノー(N)の場合はST55に移り、イエス(Y)の場合は図16の歩行検知処理を終了する。
ST55において、スペクトル解析実行間隔計測タイマTM0がタイムアップしたか否かを判別するノー(N)の場合はST38に戻り、イエス(Y)の場合はST34″に戻る。
【0078】
(実施例3の作用)
図17は、実施例2の図12に対応する実施例3の携帯電話において、発生した周波数と、エイリアスとして観測される周波数との関係を説明する説明図であり、縦軸にエイリアスとして観測される周波数、横軸に発生した周波数をとった説明図である。
図17において、前記構成を備えた実施例3の携帯電話1では、第1サンプリング周波数である64Hzでサンプリングすると32Hz(=64Hz/2=ナイキスト周波数)ごとに特異点が現れ、第2サンプリング周波数である50Hzでサンプリングすると25Hz(=50Hz/2=ナイキスト周波数)毎に特異点が現れる。そして、図17に示すように、第1サンプリング周波数でサンプリングした場合には、32Hzより大きな振動ではエイリアスが発生し、第2サンプリング周波数でサンプリングした場合には、25Hzより大きな振動ではエイリアスが発生する。
【0079】
しかしながら、実施例3の携帯電話1では、第1サンプリング周波数が64Hzに設定され、第2サンプリング周波数が50Hzに設定されているので、一方のサンプリング周波数と他方のサンプリング周波数とが互いに整数倍ではない値に設定されている。したがって、一方のサンプリング周波数のスペクトル解析結果において、エイリアスにより、振動モータM1の振動が歩行特有のスペクトルと一致して観測されても、他方のサンプリング周波数のスペクトル解析結果において、振動モータM1の振動が歩行特有のスペクトルと一致することが防止される。
【0080】
図18は実施例3の第1サンプリング加速度データのスペクトル解析結果の一例を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
図19は実施例3の第2サンプリング加速度データのスペクトル解析結果の一例を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
図18,図19において、実施例3の携帯電話1において、ユーザが歩行中に振動モータM1(装置発生周波数fvが130Hz)が振動した場合、図18、図19に示すような結果が得られた。即ち、図18において、第1サンプリング周波数fs1(=64Hz)でサンプリングした結果、エイリアスにより振動モータM1の振動が2Hzとして観測され、且つ、歩行の振動の2Hzとが一致する。一方、図19において、第2サンプリング周波数fs2(=50Hz)でサンプリングした結果、歩行の振動が1.95Hz(約2Hz)に観測され、振動モータM1の振動が20Hzに観測される。したがって、図18,図19に示すように、第1サンプリング加速度データおよび第2サンプリング加速度データの両方のスペクトル解析の結果、両方共に、1.5Hz〜4Hzの間に強いスペクトルが観測されたので、歩行と検出される(ST35Bで(Y)の場合参照)。一方、ユーザが停止中に振動モータM1が振動しても、第1サンプリング周波数のスペクトル解析結果では2Hzが観測されるが、第2サンプリング周波数のスペクトル解析結果では、20Hzのところのみに強いスペクトルが観測され、2Hzに強いスペクトルが観測されないので、停止中と判別される(ST35Bで(N)の場合参照)。
【0081】
この結果、実施例3の携帯電話1は、振動モータM1の装置発生周波数とサンプリング周波数との関係で、一方のサンプリング周波数のスペクトル解析結果において、エイリアスにより、振動モータM1の振動と歩行の振動とが区別できない場合でも、他方のスペクトル解析結果では、振動モータM1の振動が歩行の振動とは分離して観測されるので、振動モータM1の振動と歩行の振動とを区別できる。したがって、振動モータによる振動を歩行と誤検出することが防止され、現在位置の検出精度を高めることができる。
【産業上の利用可能性】
【0082】
(変更例)
以上、本発明の実施例を詳述したが、本発明は、前記実施例に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内で、種々の変更を行うことが可能である。
例えば、前記各実施例において、GPS装置を備えた携帯型経路案内装置について説明をしたが、GPS装置を備えていない携帯型経路案内装置に適用することも可能である。
【0083】
また、前記各実施例において、歩行検出時にユーザが経路上を移動しているものとして経路案内を行ったが、これに限定されず、例えば、従来公知の傾斜センサや方位センサ(特開平8−278137号公報等参照)を使用して、ユーザが移動した方向も検出して、経路案内を行うことも可能である。
さらに、本発明の携帯型経路案内装置は、携帯電話1に限定されず、PDAやノート型パソコン等の携帯端末(携帯型経路案内装置)に適用可能である。また、このほかにも携帯型のミュージックプレイヤー(ヘッドホンステレオやMP3プレイヤー等)等にこの機能を内蔵することも可能である。
【0084】
また、前記各実施例において、地図データの配信や経路探索は携帯ナビゲーション用データ配信サーバ7との交信により行われたが、携帯型経路案内装置のデータ記憶容量や処理速度が十分にある場合には、携帯型経路案内装置で全地図データの記憶や経路探索を行い、携帯ナビゲーション用データ配信サーバ7との交信を省略することも可能である。
さらに、前記実施例1において、周波数遮断装置としてローパスフィルタを使用したが、これに限定されず、装置発生周波数近辺の帯域の周波数を遮断するノッチフィルタ(Notch Filter、または バンドエリミネーションフィルタ:Band Elimination Filter)や歩行スペクトルの帯域の周波数のみ通過させるバンドパスフィルタ(Band Pass Filter)を使用することも可能である。
【0085】
また、前記各実施例において、移動距離は歩行速度と歩行時間とに基づいて演算したが、これに限定されず、加速度データから振動のピークを検出して歩数をカウントし、歩幅と歩数とに基づいて移動距離を演算することも可能である。他にも、歩行速度を複数記憶しておき、スペクトル解析で検出されたスペクトル値に応じて、使用する歩行速度を選択することも可能である。例えば、スペクトル値が1.5Hz以下で最も強かった場合には歩行速度を60m/分とし、3Hz以上で最も強かった場合には、歩行速度を100m/分として移動距離を演算することが可能である。
さらに、前記実施例1において、遮断周波数を、サンプリング周波数の1/2に設定したが、この値に限定されず、歩行スペクトルより大きく、装置発生周波数より小さい値、例えば、16Hzや64Hz等に設定することが可能である。
【0086】
また、前記各実施例において、サンプリング周波数の値や加速度データを記憶する期間、スペクトル強度閾値等の具体的数値は、実施例に示した値に限定されず、変更可能である。
さらに、前記各実施例において、歩行と検出する歩行スペクトルfwを1Hz〜4Hzに設定したが、この範囲に限定されず、小走りやゆっくり歩く場合を検出する必要がなければ2Hzとしたり、小走りの場合を検出する必要がない場合には1.5Hz〜2.5Hz等の値にすることも可能である。
【0087】
なお、上記各実施例において歩行検出手段KC4は、加速度データ記憶手段KC4A、スペクトル解析手段KC4C、解析結果記憶手段KC4D、歩行判別手段KC4Eから構成されるモジュールとして説明したが、加速度データ記憶手段KC4A、スペクトル解析手段KC4C等が別モジュールに構成されるものであってもよい。この場合、歩行検出手段KC4は、加速度データ記憶手段KC4A、スペクトル解析手段KC4C等から構成されるモジュールから必要な情報を得るように構成すればよい。
【0088】
また、前記実施例3において、スペクトル解析開始時間t1を設定して、第2サンプリング加速度データが64個記憶されてからスペクトル解析を行ったが、歩行検知処理の開始直後の歩行検知が正確でなくてもよければ、スペクトル解析開始時間t1を使用せず、スペクトル解析実行間隔t0でスペクトル解析を行うことも可能である。
さらに、前記実施例3において、第1サンプリング加速度データに基づくスペクトル解析の時期と、第2サンプリング加速度データに基づくスペクトル解析のタイミングとが一致していたが、これらはそれぞれ個別のタイミングで実行することも可能である。例えば、第1サンプリング加速度データに基づくスペクトル解析は、128個分のデータが更新される2秒間隔で行い、第2サンプリング加速度データに基づくスペクトル解析は、128個分のデータが更新される2.56秒間隔で行っておき、歩行の検知は2秒間隔で実行することも可能である。
【図面の簡単な説明】
【0089】
【図1】本発明の携帯ナビゲーションシステムの実施例1の説明図である。
【図2】図1に示す携帯ナビゲーションシステムの携帯端末の機能をブロック図(機能ブロック図)で示した図である。
【図3】実施例1の経路探索条件画像の説明図である。
【図4】経路案内画像の説明図であり、図4Aは経路案内を開始した場合の経路案内画像の説明図、図4Bは経路上を歩行している場合の経路案内画像の説明図、図4Cはガイダンスポイントで停止した場合の経路案内画像の説明図、図4Dは目的地に近づいた場合の経路案内画像の説明図である。
【図5】実施例1の携帯ナビゲーションシステムのサーバの機能をブロック図(機能ブロック図)で示した図である。
【図6】実施例1の携帯ナビゲーションシステムのサーバの案内経路作成処理のメインフローチャートである。
【図7】実施例1の携帯ナビゲーションシステムの携帯電話が備えている経路案内処理のフローチャートである。
【図8】実施例1の携帯ナビゲーションシステムの携帯電話が備えている歩行検知処理のフローチャートである。
【図9】実施例1の携帯端末を携帯したユーザが歩行中に携帯電話で計測された加速度データの一例の説明図であり、縦軸に加速度の値、横軸に時間をとった説明図である。
【図10】図9の加速度データのスペクトル解析結果を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
【図11】は実施例2の携帯電話1の制御部分が備えている各機能をブロック図(機能ブロック図)で示した図であり、実施例1の図2に対応する図である。
【図12】実施例2の携帯電話1において、発生した周波数と、エイリアスとして観測される周波数との関係を説明する説明図であり、縦軸にエイリアスとして観測される周波数、横軸に発生した周波数をとった説明図である。
【図13】実施例2の携帯電話において、ユーザが歩行中にバイブレーションが発生した時に観測された振動波形のグラフであり、縦軸に総合加速度(3軸合成加速度)、横軸に時間を取ったグラフである。
【図14】実施例1の図10に対応するスペクトル解析結果を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
【図15】実施例3の携帯電話1の制御部分が備えている各機能をブロック図(機能ブロック図)で示した図であり、実施例1の図2に対応する図である。
【図16】実施例3の携帯ナビゲーションシステムの携帯電話が備えている歩行検知処理のフローチャートであり、実施例1の図8に対応する図である。
【図17】実施例2の図12に対応する実施例3の携帯電話において、発生した周波数と、エイリアスとして観測される周波数との関係を説明する説明図であり、縦軸にエイリアスとして観測される周波数、横軸に発生した周波数をとった説明図である。
【図18】実施例3の第1サンプリング加速度データのスペクトル解析結果の一例を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
【図19】実施例3の第2サンプリング加速度データのスペクトル解析結果の一例を示すグラフであり、縦軸にスペクトル強度、横軸にスペクトル値をとったグラフである。
【図20】3軸加速度センサと、回転数が7800rpmの振動モータを備え、サンプリング周波数が64Hzである携帯電話において、振動モータを振動させた場合のサンプリング結果の説明図である。
【図21】図20のサンプリング結果を高速フーリエ変換して得られたスペクトルの説明図である。
【図22】ユーザが歩行中に3次元加速度センサの出力信号をサンプリング周波数が64Hzでサンプリングした結果を高速フーリエ変換して得られたスペクトル解析結果の説明図である。
【符号の説明】
【0090】
1…携帯型経路案内装置、
11…表示画面、
20…経路案内画像、
fco…遮断周波数、
fs…サンプリング周波数、
fs1…第1サンプリング周波数、
fs2…第2サンプリング周波数、
fv…装置発生周波数、
fw…歩行スペクトル,歩行時周波数、
KC4…歩行検出手段、
KC4″…歩行検出手段、
KC4A…加速度データ記憶手段、
KC4A1…第1サンプリング加速度データ記憶手段、
KC4A2…第2サンプリング加速度データ記憶手段、
KC4C…スペクトル解析手段、
KC4C″…スペクトル解析手段、
KC4E…歩行判別手段、
KC4E″…歩行判別手段、
KC17…案内画像作成手段、
LPF…ローパスフィルタ,周波数遮断装置、
M1…振動発生装置、
SN1…加速度センサ。
【特許請求の範囲】
【請求項1】
出発地から目的地までの経路を案内する経路案内画像を表示する表示画面と、
携帯型経路案内装置の加速度を検出する加速度センサと、
前記加速度センサの検出信号を所定のサンプリング周波数でサンプリングした加速度データを記憶する加速度データ記憶手段と、
前記加速度データ記憶手段に記憶された前記加速度データをスペクトル解析するスペクトル解析手段と、
前記スペクトル解析手段の解析により歩行特有のスペクトルである歩行スペクトルが検出されたか否かを判別することにより前記携帯型経路案内装置を携帯したユーザの歩行を検出する歩行検出手段と、
前記歩行検出手段の検出結果に応じて、前記経路案内画像を作成する案内画像作成手段と、
装置発生周波数で前記携帯型経路案内装置を振動させる振動発生装置と、
前記サンプリング周波数の1/2以上且つ前記装置発生周波数より小さい遮断周波数を有し、前記加速度センサの検出信号から前記遮断周波数以下の検出信号を通過させるローパスフィルタと、
を備えたことを特徴とするユーザが携帯可能な携帯型経路案内装置。
【請求項2】
出発地から目的地までの経路を案内する経路案内画像を表示する表示画面と、
携帯型経路案内装置の加速度を検出する加速度センサと、
前記加速度センサの検出信号を所定のサンプリング周波数でサンプリングした加速度データを記憶する加速度データ記憶手段と、
前記加速度データ記憶手段に記憶された前記加速度データをスペクトル解析するスペクトル解析手段と、
前記スペクトル解析手段の解析により歩行特有のスペクトルである歩行スペクトルが検出されたか否かを判別することにより前記携帯型経路案内装置を携帯したユーザの歩行を検出する歩行検出手段と、
前記歩行検出手段の検出結果に応じて、前記経路案内画像を作成する案内画像作成手段と、
前記携帯型経路案内装置を振動させる振動発生装置と、
前記サンプリング周波数をfs、前記振動発生装置が発生する装置発生周波数をfv、前記歩行スペクトルをfwとし、mを整数とした場合に、|fs×m−fv|≠fwとなるように設定された前記サンプリング周波数および前記装置発生周波数と、
を備えたことを特徴とするユーザが携帯可能な携帯型経路案内装置。
【請求項3】
出発地から目的地までの経路を案内する経路案内画像を表示する表示画面と、
携帯型経路案内装置の加速度を検出する加速度センサと、
前記加速度センサの検出信号を第1サンプリング周波数でサンプリングした第1サンプリング加速度データを記憶する第1サンプリング加速度データ記憶手段と、
前記第1サンプリング周波数とは異なる第2サンプリング周波数で前記加速度センサの検出信号をサンプリングした第2サンプリング加速度データを記憶する第2サンプリング加速度データ記憶手段と、
前記第1サンプリング加速度データおよび前記第2サンプリング加速度データをスペクトル解析するスペクトル解析手段と、
前記スペクトル解析手段による前記第1サンプリング加速度データの解析により歩行特有のスペクトルである歩行スペクトルが検出され且つ、前記スペクトル解析手段による前記第2サンプリング加速度データの解析により前記歩行スペクトルが検出された場合に、前記携帯型経路案内装置を携帯したユーザの歩行が歩行したものと判別する歩行検出手段と、
前記歩行検出手段の検出結果に応じて、前記経路案内画像を作成する案内画像作成手段と、
前記携帯型経路案内装置を振動させる振動発生装置と、
を備えたことを特徴とするユーザが携帯可能な携帯型経路案内装置。
【請求項4】
出発地から目的地までの経路を案内する経路案内画像を表示する表示画面と、
携帯型経路案内装置の加速度を検出する加速度センサと、
前記加速度センサの検出信号に基づいて携帯型経路案内装置を携帯したユーザの歩行を検出する歩行検出手段と、
前記歩行検出手段の検出結果に応じて、前記経路案内画像を作成する案内画像作成手段と、
前記ユーザが歩行時に前記加速度センサで検出される歩行時周波数よりも大きな装置発生周波数で携帯型経路案内装置を振動させる振動発生装置と、
前記加速度センサの検出信号から前記装置発生周波数の検出信号を遮断し且つ前記歩行時周波数の検出信号を通過させる周波数遮断装置と、
を備えたことを特徴とするユーザが携帯可能な携帯型経路案内装置。
【請求項1】
出発地から目的地までの経路を案内する経路案内画像を表示する表示画面と、
携帯型経路案内装置の加速度を検出する加速度センサと、
前記加速度センサの検出信号を所定のサンプリング周波数でサンプリングした加速度データを記憶する加速度データ記憶手段と、
前記加速度データ記憶手段に記憶された前記加速度データをスペクトル解析するスペクトル解析手段と、
前記スペクトル解析手段の解析により歩行特有のスペクトルである歩行スペクトルが検出されたか否かを判別することにより前記携帯型経路案内装置を携帯したユーザの歩行を検出する歩行検出手段と、
前記歩行検出手段の検出結果に応じて、前記経路案内画像を作成する案内画像作成手段と、
装置発生周波数で前記携帯型経路案内装置を振動させる振動発生装置と、
前記サンプリング周波数の1/2以上且つ前記装置発生周波数より小さい遮断周波数を有し、前記加速度センサの検出信号から前記遮断周波数以下の検出信号を通過させるローパスフィルタと、
を備えたことを特徴とするユーザが携帯可能な携帯型経路案内装置。
【請求項2】
出発地から目的地までの経路を案内する経路案内画像を表示する表示画面と、
携帯型経路案内装置の加速度を検出する加速度センサと、
前記加速度センサの検出信号を所定のサンプリング周波数でサンプリングした加速度データを記憶する加速度データ記憶手段と、
前記加速度データ記憶手段に記憶された前記加速度データをスペクトル解析するスペクトル解析手段と、
前記スペクトル解析手段の解析により歩行特有のスペクトルである歩行スペクトルが検出されたか否かを判別することにより前記携帯型経路案内装置を携帯したユーザの歩行を検出する歩行検出手段と、
前記歩行検出手段の検出結果に応じて、前記経路案内画像を作成する案内画像作成手段と、
前記携帯型経路案内装置を振動させる振動発生装置と、
前記サンプリング周波数をfs、前記振動発生装置が発生する装置発生周波数をfv、前記歩行スペクトルをfwとし、mを整数とした場合に、|fs×m−fv|≠fwとなるように設定された前記サンプリング周波数および前記装置発生周波数と、
を備えたことを特徴とするユーザが携帯可能な携帯型経路案内装置。
【請求項3】
出発地から目的地までの経路を案内する経路案内画像を表示する表示画面と、
携帯型経路案内装置の加速度を検出する加速度センサと、
前記加速度センサの検出信号を第1サンプリング周波数でサンプリングした第1サンプリング加速度データを記憶する第1サンプリング加速度データ記憶手段と、
前記第1サンプリング周波数とは異なる第2サンプリング周波数で前記加速度センサの検出信号をサンプリングした第2サンプリング加速度データを記憶する第2サンプリング加速度データ記憶手段と、
前記第1サンプリング加速度データおよび前記第2サンプリング加速度データをスペクトル解析するスペクトル解析手段と、
前記スペクトル解析手段による前記第1サンプリング加速度データの解析により歩行特有のスペクトルである歩行スペクトルが検出され且つ、前記スペクトル解析手段による前記第2サンプリング加速度データの解析により前記歩行スペクトルが検出された場合に、前記携帯型経路案内装置を携帯したユーザの歩行が歩行したものと判別する歩行検出手段と、
前記歩行検出手段の検出結果に応じて、前記経路案内画像を作成する案内画像作成手段と、
前記携帯型経路案内装置を振動させる振動発生装置と、
を備えたことを特徴とするユーザが携帯可能な携帯型経路案内装置。
【請求項4】
出発地から目的地までの経路を案内する経路案内画像を表示する表示画面と、
携帯型経路案内装置の加速度を検出する加速度センサと、
前記加速度センサの検出信号に基づいて携帯型経路案内装置を携帯したユーザの歩行を検出する歩行検出手段と、
前記歩行検出手段の検出結果に応じて、前記経路案内画像を作成する案内画像作成手段と、
前記ユーザが歩行時に前記加速度センサで検出される歩行時周波数よりも大きな装置発生周波数で携帯型経路案内装置を振動させる振動発生装置と、
前記加速度センサの検出信号から前記装置発生周波数の検出信号を遮断し且つ前記歩行時周波数の検出信号を通過させる周波数遮断装置と、
を備えたことを特徴とするユーザが携帯可能な携帯型経路案内装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】

【図13】

【図14】
【図15】
【図16】
【図17】

【図18】
【図19】
【図20】

【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2006−153795(P2006−153795A)
【公開日】平成18年6月15日(2006.6.15)
【国際特許分類】
【出願番号】特願2004−348443(P2004−348443)
【出願日】平成16年12月1日(2004.12.1)
【出願人】(500168811)株式会社ナビタイムジャパン (410)
【Fターム(参考)】
【公開日】平成18年6月15日(2006.6.15)
【国際特許分類】
【出願日】平成16年12月1日(2004.12.1)
【出願人】(500168811)株式会社ナビタイムジャパン (410)
【Fターム(参考)】
[ Back to top ]