
Fターム[2F051DA03]の内容
特定の目的に適した力の測定 (5,882) | 測定できる力成分の数 (435) | 3分力 (321)
Fターム[2F051DA03]に分類される特許
101 - 120 / 321
変位センサおよび力検出装置
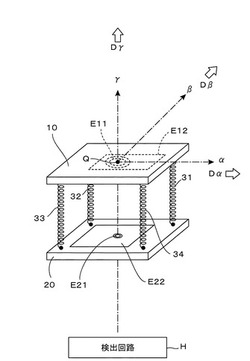
【課題】力・モーメントを独立検出する装置の薄型化を図る。
【解決手段】変位基板10側に電極E11,E12、固定基板20側に電極E21,E22を設け、両基板をバネ31〜34で接続する。E11,E21は、γ軸を中心とした円形電極で、αβ平面上へ投影すると、E21はE11内に包含される。E12,E22は、α軸方向にオフセット配置された矩形電極で、E12のβ軸方向幅は、E22のβ軸方向幅内に包含される。E11,E21間の容量値C1は、変位Dγの情報のみを示し、E12,E22間の容量値C2は、変位DαおよびDγの合成情報を示すので、両者を用いて、変位Dα,Dγを独立検出できる。より広い基板の複数N箇所にローカル原点Qを設定し、それぞれ所定の向きにαβγローカル座標系を定め、それぞれに同様の電極を配置する。各原点Qについての検出値Dα,Dγを統合して、基板全体に作用した力・モーメントを検出する。
(もっと読む)
磁気式力覚センサ

【課題】 磁束発生源の発生磁場の変動を精度よく検出し、補正することが可能な磁気式力覚センサを提供する。
【解決手段】 磁束発生源(5)の磁極端面に対して対向するように、外力によって生じる磁場変化を検出する変位磁電変換素子(4)と、外力によって生じる磁場変化を生じない固定磁電変換素子(7)を設ける。センサ内部の温度上昇等の環境変動、経年変化などによって生じる磁束発生源の発生磁場の変動ΔBを固定磁電変換素子(7)で検出する。その検出量に基づいて演算部(11)により補正処理することにより、変位磁電変換素子のオフセット補正もしくは感度係数の補正を行う。
(もっと読む)
力センサ試験装置
【課題】被試験体である力センサに対して6軸方向に加重試験できる力センサ試験装置を提供する。
【解決手段】試験装置101は、被試験体である力センサ113を載置可能なステージ120と、ステージ120を介して力センサ113をX・Y・Z軸の各軸回転の6方向に移動可能な駆動部130と、ステージ120上に載置された力センサ113に加重可能な加重部140と、を備えている。加重部140は、ステージ120上に載置された力センサ113の上部に取り付けられる取り付け治具107と、取り付け治具107から水平方向に引き出されるように張設された4本のワイヤ108と、ワイヤ108を水平方向から鉛直方向に変換可能な滑車部150と、ワイヤ108の先端に取り付けられた錘110と、を含んでいる。
(もっと読む)
分力計
【課題】設計時において、モーメントの検出感度と力の検出感度とを独立して調整することがより容易となる分力計を提供する。
【解決手段】所定間隔隔てて延出した所定高さの一対の支柱19と、上面に受力面を備えると共に厚みが支柱の高さより薄くかつ長さが所定間隔より短い中央剛体部18と、中央剛体部の所定方向に作用する力に応じて伸縮する薄肉の薄肉部15と、中央剛体部の所定方向に作用する力に応じて伸縮する薄肉の薄肉部16と、薄肉部15の2箇所及び薄肉部16の2箇所に取り付けられた4つの歪みゲージP1〜P4と、薄肉部15の2箇所及び薄肉部16の2箇所に取り付けられた4つの歪みゲージL1〜L4とを備える。
(もっと読む)
剪断力検出素子、触覚センサー、および把持装置
【課題】簡単な構成で剪断力の測定が可能な剪断力検出素子、触覚センサー、および把持装置を提供する。
【解決手段】剪断力検出素子200は、矩形状の剪断力検出用開口部111、剪断力検出用開口部111の外周縁に設けられる枠部を有するセンサー基板11と、センサー基板11上に形成されて剪断力検出用開口部111を閉塞する可撓性を有する支持膜14と、センサー平面視において、剪断力検出用開口部111の長辺に沿い、剪断力検出用開口部111の内側および外側に跨って、前記支持膜14上に設けられるとともに、湾曲することで電気信号を出力する剪断力検出用圧電体210と、剪断力検出用圧電体210および支持膜14を覆う弾性膜15と、を具備した。
(もっと読む)
力覚センサ
【課題】複数のベクトル量を検出できるセンサを提供する。
【解決手段】力覚センサ201では、テーブル203の可動を受ける3自由度を有する軸受け206と、軸受け206の可動を受ける2自由度を有する軸受け207と、ベース202に固定され、軸受け207の可動を受けるアーム205と、一端が軸受け206と接続され、他端が軸受け207と接続されたロッド204と、を含んで、テーブル203とベース202とが連結されている。この力覚センサ201は、アーム205の変位および/または変形を検出する検出素子208と、検出素子208の検出値を成分とする行列Dから、力を示すベクトルFへ変換するための係数行列Gを用いて、
F=G・D
からテーブル203に作用する力の大きさおよび/または方向を計算する演算部を有する回路基板210と、を備えている。
(もっと読む)
ステアリング操作状態推定装置、及びプログラム
【課題】従来技術と比較して、より精度が良好な力とトルクを検出する。
【解決手段】ステアリングホイール22の予め定められた部分に作用する力及びトルクを検出するための6分力検出器14と、車両の姿勢角を検出する姿勢角センサ18と、ステアリングホイールの操舵角を検出する操舵角センサ16と、車両の加速度を検出する加速センサ20と、検出された力及びトルク、検出された姿勢角、姿勢角から得られる第1の角速度、第1の角速度から得られる角加速度、検出された操舵角、操舵角から得られる第2の角速度、第2の角速度から得られる角加速度、検出された車両の加速度、予め定められた部分の質量、及びステアリングホイールの傾斜角に基づいて、ドライバが予め定められた部分に加え、かつ前記部分に発生した遠心力及び慣性力が除去された力及びトルクを推定する。
(もっと読む)
垂直にセンサ組み立てる方法
【課題】チップを基板に垂直に結合させる方法を提供する。
【解決手段】基板上に線形の外観を持つ金属バーを形成するステップと、金属バーの上にハンダペースト層を形成してハンダバーを形成するステップと、基板上に複数の金属パッドを形成するステップと、複数の金属パッド上にハンダペースト層を形成して基板上に複数のハンダパッドを形成するステップと、を有する。複数のハンダパッドの各々は、ハンダバーの長手エッジからオフセット空間だけオフセットする。基板に垂直に結合されるチップは、オフセット空間よりもわずかに小さい垂直−チップ厚さを備える。垂直に結合されるチップは、複数のハンダパッドとハンダバーとの間に嵌合される。ハンダバーは、垂直に結合されるチップのアライメントを可能にする。
(もっと読む)
力覚または運動センサおよびその製造方法
【課題】感度及び信頼性が高く、構造がより簡単で製造コストの安価な力覚または運動センサを提供する。
【解決手段】ベース2と、ベース2に対して6自由度を有しベース2と対向して配置されたテーブル21と、ベースとテーブル21とを連結するよう並列配置された6つの連結部と、ベース2とテーブル21との間の変位及び/または変形を検出する複数の検出素子と、各々の検出素子の変位及び/または変形量を総合的に計算する演算部とからなるセンサにおいて、各連結部のテーブル側第1軸受12はテーブル21裏側より嵌合するよう構成されており、テーブル21に固定される押圧板22とテーブル21とにより保持固定されている。
(もっと読む)
タイヤ作用力検出装置
【課題】タイヤ作用力の計測精度の向上と、過大な応力や変形の抑制とを両立できるタイヤ作用力検出装置を提供すること。
【解決手段】ハブ3と、タイヤのホイール1とを備えた車両においてタイヤ作用力を検出するタイヤ作用力検出装置1−1であって、ハブとホイールとを車軸方向に接続する接続部4aと、接続部の変形量を検出する検出手段とを備え、検出された変形量に基づいてタイヤ作用力を検出し、更に、ハブとホイールとの間に接続部と並列に配置され、ハブ側あるいはホイール側の一方に固定されて他方2と車軸方向に対向する支持部材4gを備え、タイヤ作用力によるハブとホイールとを車軸方向に互いに近づける荷重により接続部が車軸方向に変形すると、支持部材と他方との車軸方向の隙間が減少し、荷重が小さい場合には、支持部材は他方から離間して接続部が荷重を支持し、荷重が大きい場合には、支持部材が他方に当接して接続部と共に荷重を支持する。
(もっと読む)
力検出装置
【課題】 装置の構造を単純化する。
【解決手段】 図(a) のように、XY平面に平行な上方基板10と下方基板20との間に、第1の柱状体P1と第2の柱状体P2とを配置する。各柱状体P1,P2の上端は、上方膜部11,12を介して上方基板10に接続され、下端は、導電性の下方膜部21,22を介して下方基板20に接続される。各柱状体P1,P2は、垂直基準軸R1,R2に対して、互いに逆方向に傾斜している。図(b) のように、上方基板10に右方向の力+Fxが作用して右方へスライドすると、柱状体P1は寝る方向へ傾いて下方膜部21は上方へ変形し、柱状体P2は立つ方向へ傾いて下方膜部22は下方へ変形する。下方膜部21と電極E5とによる容量素子と、下方膜部22と電極E6とによる容量素子との容量値の差により、X軸方向の力Fxの検出を行う。両容量値の和により、Z軸方向の力Fzの検出もできる。
(もっと読む)
柔軟触覚センサ
【課題】センサ自体が多軸の柔軟変形が可能で、かつ、その変形を検知できる触覚センサを提供する。
【解決手段】光透過性弾性部材からなるセンサ本体と、前記本体に設けた発光部と、前記発光部から離間させて前記本体に設けた受光部と、を備え、前記受光部は、複数の受光素子からなり、各受光素子は前記発光部に対して互いに異なる配向を有しており、前記センサ本体の弾性変形に応じて変位する各受光素子で取得される光量の変化から当該センサ本体の変形を検知する、柔軟触覚センサ。
(もっと読む)
力覚センサ
【課題】 生産用ロボティクスのアームやフィンガーなど、精密構造部へ働く外力やモーメントを高精度に検出することが可能な、高剛性で高感度な力覚センサを提供する。
【解決手段】 基部2と、基部と連結された弾性支持部4と、弾性支持部によって支持された作用部3と、作用部に作用する外力及びモーメントの少なくとも一方を検出する検出部と、を有する力覚センサにであって、検出部は、基部または作用部の一方に設けられている光源5と、他方に設けられている回折格子7と、光源から射出され、回折格子で反射した回折光による干渉像を受光し、互いに位相の異なる複数の信号を出力する受光素子列6と、複数の信号に基づいて作用部の基部に対する変位を算出し、変位に基づいて外力及びモーメントの少なくとも一方を算出する演算部8と、を有する。
(もっと読む)
表面の手触り感を特性評価する方法
表面の手触り感を特性評価する方法は、力センサが特性評価を行う表面に対して相対的に変位している間に、この力センサが感知する少なくとも1種類の力を測定するステップ(211)と、このセンサが出力する、先に測定した力を表す出力信号の1つまたは複数の時間および/または周波数のパラメータを計算するステップ(213)と、計算された伝達関数を適用することにより、複数の触感的記述子の1つの値を求めるステップ(215)と、を少なくとも含み、伝達関数は、各記述子ごとに、対象とする触感的記述子のいくつかの値を、対象とする触感的記述子の値を表すいくつかの試験表面から力センサが求めた測定値から計算される1つまたは複数の時間および/または周波数のパラメータのいくつかの値に関連させる学習データベースからの回帰によって予め決定される。  (もっと読む)
(もっと読む)
センサ付車輪用軸受
【課題】 軸受内外温度差による検出誤差を補正して車輪用軸受やタイヤ接地面に作用する荷重を高精度に検出でき、センサ組付けも容易なセンサ付車輪用軸受を提供する。
【解決手段】 外方部材1と内方部材2の対向し合う複列の転走面3,4間に転動体5を介在させる。外方部材1と内方部材2のうち固定側部材に1つ以上のセンサユニット20を設ける。センサユニット20は、固定側部材の外径面に接触固定される歪み発生部材21と、その歪みを検出する歪みセンサ22と、そのセンサ設置部の温度を検出するセンサ部温度センサ28と、固定側部材の転走面3の近傍の温度を検出する転走面温度センサ29とからなる。歪みセンサ22の出力信号をセンサ部温度センサ28および転走面温度センサ29の出力で補正し、その補正した信号から車輪に加わる荷重を推定する推定手段30を設ける。
(もっと読む)
センサ付車輪用軸受
【課題】 車輪用軸受が静止あるいは低速状態でも、レスポンス良く車輪にかかる荷重を正確に推定できるセンサ付車輪用軸受を提供する。
【解決手段】 車輪用軸受の外方部材と内方部材のうちの固定側部材にセンサユニット20を設ける。センサユニット20は、固定側部材に接触して固定される4つ以上の接触固定部を有する歪み発生部材21と、これに取付けられてその歪みを検出する3つ以上のセンサ22A,22B,22Cを有する。これらのセンサ出力信号から荷重を推定する荷重推定手段30を設ける。荷重推定手段30は、2つのセンサ22A,22Cの出力信号A,Cから平均値を求める平均値演算部31と、2つのセンサ22B,22Cの出力信号B,Cから振幅値を求める振幅値演算部32と、これら平均値および振幅値を用いた演算処理により車輪に加わる荷重を推定する荷重演算部33を有する。
(もっと読む)
センサ付車輪用軸受
【課題】 軸受の歪み応答に含まれる非線形性を簡易な演算で補正して、荷重推定誤差を低減することができるセンサ付車輪用軸受を提供する。
【解決手段】 車輪用軸受の外方部材1と内方部材2のうちの固定側部材にセンサユニット20を設ける。センサユニット20は、歪み発生部材21とその歪みを検出する1つ以上のセンサを有する。センサ出力信号から荷重を推定する荷重推定手段30を設ける。荷重推定手段30は、差分値演算部31と荷重演算部32とを有する。差分値演算部31は、180度の位相差をなして対向配置されたセンサユニット20のセンサ出力信号の振幅値の差分値を演算する。荷重演算部32は、差分値をレベル分けした各領域に対応して荷重演算用のパラメータが複数設定され、差分値に対応する領域のパラメータを選択して、センサユニット20のセンサ出力信号から荷重を推定する。
(もっと読む)
センサ付車輪用軸受
【課題】 環境の変化や長期間の使用によっても検出精度が悪化することなく、車輪にかかる荷重を正確に推定できるセンサ付車輪用軸受を提供する。
【解決手段】 車輪用軸受の外方部材と内方部材のうちの固定側部材にセンサユニットを設ける。センサユニットは、歪み発生部材とその歪みを検出するセンサ22とでなる。センサ22の出力信号の平均値を用いて車輪に加わる荷重を推定する主荷重推定手段31と、センサ22の出力信号の転動体5の通過による信号波形の振幅値を用いて荷重を推定する振幅処理荷重推定手段36を設ける。その振幅処理荷重推定値s2により、主荷重推定手段31の平均値を用いた推定荷重出力s1のドリフト量を推定するドリフト量推定手段37を設ける。そのドリフト量で補正する補正手段33を設ける。
(もっと読む)
力検出装置
【課題】 構造を単純化し、他軸成分の干渉を排除し、力とモーメントとを区別して検出する。
【解決手段】 支持基板300上のX軸の正負およびY軸の正負の4カ所の円形領域に、電極E1〜E8,F1〜F8を形成する。各円形領域の上方には、所定距離をおいて、導電性可撓性肉薄円板を配置し、対向電極との間で容量素子を形成する。各肉薄円板の上面中央には柱状体の下端を固定し、各柱状体の上端には受力体を取り付ける。受力体に力が作用すると、4本の柱状体が傾斜したり、上下に変位したりして、各容量素子の静電容量値が変化する。電極E1〜E8によって構成される主容量素子の静電容量値の変化に基づき、各座標軸方向の力Fx,Fy,Fzと各座標軸まわりのモーメントMx,My,Mzとを検出する。このとき、電極F1〜F8によって構成される副容量素子の静電容量値の変化に基づき、他軸成分の干渉を相殺する。
(もっと読む)
空気入りタイヤ、及びそれに用いる歪センサ
【課題】歪センサを正確な位置に効率よく取り付けでき、かつ歪センサの交換を可能として経済性を高めうるとともに、直進時、及びコーナリング時においても歪センサによる測定精度を高く確保する。
【解決手段】 サイドウォールゴム3Gの外面Gsに、歪センサ取付け用のセンサ取付け穴20を凹設したタイヤ本体10の前記センサ取付け穴20内に、歪センサ21をその長さ方向に圧縮しつつ嵌入する。嵌入前において、前記歪センサ21の長さL1は、前記センサ取付け穴20の長さL0より大、かつ前記歪センサ21の巾W1は、前記センサ取付け穴20の巾W0以下とした。
(もっと読む)
101 - 120 / 321
[ Back to top ]