
Fターム[2F051DA03]の内容
特定の目的に適した力の測定 (5,882) | 測定できる力成分の数 (435) | 3分力 (321)
Fターム[2F051DA03]に分類される特許
61 - 80 / 321
圧力検出装置、電子機器
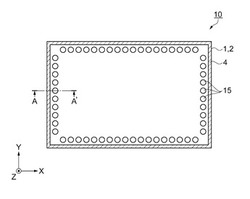
【課題】簡素な構成で外圧の3次元ベクトルを精度よく検出可能な圧力検出装置、これを
備えた電子機器を提供すること。
【解決手段】圧力検出装置10は、一対の基板1,2と、一対の基板1,2間に設けられ
ると共に、一対の基板1,2のうち一方の基板2の外周に沿って配置された複数の圧力検
出部15と、を備え、圧力検出部15は、一対の基板1,2のうち他方の基板1に設けら
れた圧力センサーと、先端部が圧力センサーに当接するように配置された弾性体突起とか
らなり、一方の基板2に加わる外圧の方向と大きさを複数の圧力検出部15により検出す
る。
(もっと読む)
触覚センサユニット

【課題】小型の触覚センサユニット1を提供する
【解決手段】触覚センサユニット1は、変形を検出するピエゾ抵抗層11Wが形成されたカンチレバー12を有する半導体基板11とカンチレバー12を内部に埋め込んだ弾性体13とピエゾ抵抗層11Wと接続されたバンプ14とを有するセンサチップ10と、接続パッド22と接続された配線層21とを有する配線板20と、を具備し、バンプ14と接続パッド22とを介して、センサチップ10が配線板20にフリップチップ実装されている。
(もっと読む)
検出装置、電子機器及びロボット
【課題】耐久性に優れ外圧の方向と大きさを高い精度で検出することが可能な検出装置、
電子機器及びロボットを提供することを目的とする。
【解決手段】基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と
、基準点Pと重なる位置に略中心が位置するとともに外圧によって弾性変形する略半球状
の弾性体突起21と、弾性体突起21を隔てて第1基板10の反対側に設けられた第2基
板30と、を備える。
(もっと読む)
タイヤ試験機に用いられる多分力計測スピンドルユニットの校正方法
【課題】スピンドル軸芯方向に沿って離れた位置に2つの多分力計測センサを備えた多分力計測スピンドルユニットにおいて、タイヤに作用する実荷重を求める際に用いる変換行列を確実に校正することができ、校正された変換行列を用いることで、タイヤに発生する並進荷重およびモーメントを精度よく算出する。
【解決手段】本発明に係る多分力計測スピンドルユニット1の校正方法は、スピンドル軸4に作用する荷重を計測する「計測工程」と、この計測工程で得られた計測荷重ベクトルとこの計測荷重ベクトルに作用する変換行列Eとを用いて、タイヤTに働く実荷重ベクトルを求める「算出工程」と、この算出工程に先立って、複数の一次独立な試験条件の基で計測荷重ベクトルを計測し且つ得られた計測荷重ベクトルを基に変換行列Eを校正する「校正工程」を有している。
(もっと読む)
検出装置、電子機器、及びロボット
【課題】外圧の方向と大きさとを高い精度で検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する単位突起24が形成された第2基板20と、を備え、単位突起24が、硬度の高い弾性体突起22と、硬度の低い弾性体層23と、からなる。
(もっと読む)
入力物理量推定方法、推定装置並びに推定プログラム
【課題】系への入力と系からの出力とがどちらも多変数(多元・多次元の物理量)である場合に系からの出力に基づいて前記系への入力を推定することができるようにする。
【解決手段】第一近似係数を算定する処理と、推定入力物理量を算出する処理と、推定入力物理量の有効判定を行う処理と、推定入力物理量の決定を行う処理と、推定出力物理量を算出する処理と、残差を算出する処理と、残差と増減表との比較を行う処理と、次推定入力物理量成分を決定する処理と、打ち切り判定を行う処理とを有するようにした。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外圧の有無を高速に検出し、かつ外圧の方向と大きさを高い精度で検出することが可能な検出装置、電子機器及びロボットを提供すること。
【解決手段】検出装置は、基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する弾性体突起22が形成された第2基板20と、を備えた検出部1と、複数の圧力センサー12のうちの一部により検出された圧力値から外圧の有無を検出する検出動作を行い、その検出結果から検出部1の次の検出動作を制御する制御部と、を備える。
(もっと読む)
センサ装置および分布測定装置
【課題】せん断応力及び接触圧力の直接同時測定に際し、生体へ適用可能で且つ接触圧力による影響を排除したせん断応力の測定ができるセンサ装置70を提供する。
【解決手段】圧力変換素子50はポリピロール薄膜を用い、電極材は銅張ポリイミドフィルムを用いた。せん断応力測定部30は片面側電極10における櫛型電極11aと対面側電極20における櫛形電極21aとの櫛部分を揃わせて対面させ、両電極の間に圧力変換素子50を挟み込む。接触圧力測定部40は片面側電極10における方形電極12aと対面側電極20における櫛形電極21cとを対面させ、両電極の間に圧力変換素子50を挟み込む。4ゲージ法ブリッジ回路60の抵抗変化量の関係に基づき、せん断応力測定部30等における抵抗変化量ΔRaから接触圧力の影響による抵抗変化量ΔRbを差し引きした出力を得ることにより、接触圧力による影響を排除したせん断応力の測定を行う。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外圧の方向と大きさを高い精度で検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する弾性体突起22、が形成された第2基板20と、を備える。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外圧の方向と大きさを高い精度で検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの周りに複数配置された第1容量電極12、を有する第1基板10と、第1容量電極12を挟んで第1基板10と対向配置された第2基板20と、第1基板10と第2基板20との間において誘電体を挟んで第1容量電極12と対向配置された第2容量電極22と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第2基板20に当接した状態で弾性変形する弾性体突起32、が形成された第3基板30と、を備える。
(もっと読む)
力覚または運動センサ
【課題】感度及び信頼性が高く、構造がより簡単で製造コストの安価な力覚または運動センサを提供する。
【解決手段】本発明による力覚または運動センサにおいては、センサを保持し固定するためのベース1と、6自由度方向の応力に感応するよう構成され前記ベースと対向して配置されたテーブル30と、前記ベースと前記テーブルとの間に配置され前記応力に対応して動作する動作部と、前記動作部の変位及び/または変形を検出する複数の検出素子と、前記各々の検出素子の変位及び/または変形量を総合的に計算する演算部とからなるセンサにおいて、前記動作部は放射状に配置された複数の感応アーム10と、これらアームと一体化されたアームより厚いボス部25とからなる。
(もっと読む)
球体移動経路の測定方法
【課題】球体の実際の移動状態に近いデータを獲得可能な球体移動経路の測定方法を提供する。
【解決手段】操作ユニットおよび三軸加速度計Cを用意し、三軸加速度計Cと操作ユニットとを接続させ、三軸加速度計Cで測定したデータを操作ユニットに伝送し、測定対象物Oの内部に三軸加速度計Cを置き、三軸加速度計CでXYZ三軸の空間座標を定義し、第一測定時点に三軸の初期位置を確認し、第二測定時点に比較位置を確認し、データを操作ユニットに伝送する。XYZ三軸のそれぞれの比較位置と初期位置との間の角度を比較し、XYZ三軸の軸方向上の力を受けた後の加速度データと、それぞれ軸方向の分力のベクトルと、それぞれ軸に対する旋転力とを算出する。三つの軸方向の加速度値と、測定対象物Oの重量およびサイズとに基づいて、測定対象物Oの初期速度、飛行時間、飛行高度、飛行距離および旋転速度のうちの少なくとも一つのデータを求める。
(もっと読む)
センサ付車輪用軸受
【課題】 追加のセンサ等を設けることなく、簡単な構造で、車速に応じた計算方法の切り替えを実現できて、車輪に加わる荷重の推定精度を向上させることができ、コンパクト化、構成の単純化、信頼性を向上が図れるセンサ付車輪用軸受を提供する。
【解決手段】 車輪用軸受の外方部材と内方部材のうちの固定側部材にセンサユニットを設ける。センサユニットのセンサ出力信号から荷重を推定する荷重推定手段31を設ける。荷重推定手段31は、各センサ出力信号の振幅値の総和から車輪の回転速度領域を判別する回転速度領域判別部32と、各センサ出力信号を推定演算式に当てはめて荷重を演算・推定する荷重推定演算部35と、判別された回転速度領域に応じて、推理演算式のパラメータを切り替えるパラメ−タ切替部34aとを備える。
(もっと読む)
センサー素子アレイ及びその製造方法
【課題】複数方向に感度を有するセンサー素子アレイを安価に提供する。
【解決手段】センサー素子アレイは、第1のセンサー素子及び第2のセンサー素子と、第1のセンサー素子及び第2のセンサー素子が配置されたシート基板と、を具備し、シート基板には切れ込みが形成されており、該切れ込みの隙間が広げられていて、シート基板のうち、第1のセンサー素子が配置された箇所における基板面と、第2のセンサー素子が配置された箇所における基板面とが、交差する角度に形成されている。
(もっと読む)
力覚センサの校正方法
【課題】エンドエフェクタを交換せずに、力覚センサをアームの先端に装着したままで校正できる簡易な力覚センサの校正方法を提供すること。
【解決手段】一方のロボット101の力覚センサ1が校正済みで、他方のロボット102の力覚センサ2が校正対象である。まず、一対のロボット101,102のハンド3a,3b同士を当接させる(当接工程)。当接工程の実行による一方のロボット101の校正済みの力覚センサ1の検出信号を力又はモーメントを示す測定値に変換する(測定工程)。測定工程で得られた測定値に基づき、当接工程により反作用によって他方のロボット102のハンド3bに作用している力又はモーメントを示す値を求める(算出工程)。当接工程で他方のロボット102の校正対象である力覚センサ2が出力した検出信号が、算出工程で得られた力又はモーメントを示す値と同一の値に変換されるように、変換データを更新する(校正工程)。
(もっと読む)
ピエゾ抵抗素子内蔵センサチップの製造方法及びそのセンサチップ
【課題】容易かつ低コストの製造が実現でき、また小型化、薄型化を促進する。
【解決手段】インターポーザ1上において、その凹部にIC2を接続すると同時に、ピエゾ抵抗素子が上面略中央に配置された複数のセンサ部4を接続し、この複数のセンサ部4のそれぞれに対し、ピエゾ抵抗素子に圧縮及び引張り応力を生じさせるための伝達体5とこの伝達体5の上面よりも面積の大きい外力受け板6を配置する。その後、上記外力受け板6とセンサ部4及び集合基板1との間に、固定/緩衝用樹脂7を充填し、最後に集合基板体8を個片化して複数のセンサチップ10を製作する。上記樹脂7は、外力受け板6をセンサ部4と集合基板1に対して固定して、センサチップ10を一体化させると共に、その弾性力により外力受け板6で受けた外力を吸収し弱める緩衝の役目をする。
(もっと読む)
車軸6分力計角度検出器の支持機構
【課題】 スリップリングに組み込まれた角度検出器を車体との間で基準座標系を保持し、転舵による角度変化に対する誤差を無くし、精度の向上を図る。
【解決手段】 車軸6分力計7は、ハブアダプタ5を介して、ホイールハブ4とホイール6との間に配設され、車輪から加わる外力を受けて、X、Y、Z軸方向の分力および各軸回りのモーメントに対応する信号を出力する。スリップリングの支持機構9は、X軸方向に平行移動する第1、第2の平行四辺形リンク10、12、これらをY軸方向に移動可能とする第1、第2の回転ジョイント11、13、第2の回転ジョイント13とスリップリング8との間のZ軸を中心とした相対回動を可能とする第3の回転ジョイント14からなっている。
(もっと読む)
3次元ロードセル
【課題】荷重の測定精度を向上して実用性が高い3次元ロードセルを提供する。
【解決手段】基部12と、基部12との間に間隙Gをあけて支持された荷重受部14と、一端を基部12に固定し他端を荷重受部14に固定して荷重受部14を基部12に支持させ、荷重受部14が荷重を受けた際に歪みを生じる複数の起歪部であり、任意の第1方向と、第1方向に交差する第2方向と、第1方向と第2方向を含む平面に交差する第3方向と、の3つの方向に向けて基部14と荷重受部14との間に渡架状に設けられた第1、第2、第3起歪部161、162、163と、第1、第2、第3起歪部にそれぞれ取り付けられたひずみゲージと、を含むことを特徴とする3次元ロードセル10から構成される。
(もっと読む)
外力検出インタフェースの故障検知方法
【課題】エンドエフェクタを力覚センサで可動体に固定した外力検出インタフェースの力覚センサの故障を検出する方法を提供する。
【解決手段】剛性を有するエンドエフェクタ10が力覚センサ25、26によって可動体30に拘束され、エンドエフェクタ10に作用する外力が力覚センサ25、26の応答値から算出される外力検出インタフェースの力覚センサの故障検出方法であって、応答チャンネルの数が冗長性を有する力覚センサ25、26でエンドエフェクタ10を可動体30に拘束し、正常な力覚センサの応答値ベクトルが取り得る超平面に外力検出時の力覚センサ25、26の応答値ベクトルを拘束したときの超平面上の理論値と、当該応答値ベクトルとの偏差を求め、この偏差の大きさに基づいて、誤った応答値を応答する力覚センサのチャンネルを特定する。また、誤差を含むセンサ応答値から正しい外力を推定することもできる。
(もっと読む)
力覚センサ
【課題】力覚センサの検出精度を向上する。
【解決手段】連結部10は、テーブル3の可動を受ける軸受け部6と、軸受け部6の可動を受ける軸受け部7と、一端が軸受け部6と接続され、他端が軸受け部7と接続されたロッド4と、一端が軸受け部7と接続され、他端がベース2と固定されたアーム5とを有している。アーム5は、ベース2、テーブル3およびロッド4より弾性が高いものである。力覚センサ1は、複数の連結部10のアーム5のそれぞれに対して、アーム5の変形を一方向で検出する複数の検出素子9と、複数の検出素子9の検出値からキャリブレーションを行ってテーブル3に作用する6成分を計算する演算部を含む回路基板11とを備えている。
(もっと読む)
61 - 80 / 321
[ Back to top ]