
Fターム[2F062DD03]の内容
機械的手段の使用による測定装置 (14,257) | 補正、補償、較正、調整 (452) | 補正、補償 (168) | 位置ずれの (23)
Fターム[2F062DD03]の下位に属するFターム
バックラッシュ
スリップ、すべり
Fターム[2F062DD03]に分類される特許
1 - 20 / 23
眼鏡枠形状測定装置
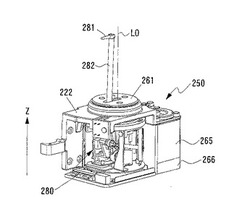
【課題】高カーブフレームの精度の良い測定を可能にし、型板測定においても型板トレースの精度の向上を図ることが可能な眼鏡枠形状測定装置を提供する。
【解決手段】測定子281が取り付けられた測定子軸282を傾斜可能に保持する保持ユニット250と、測定子軸の傾斜角度を検知する手段と、XY移動手段と、Z方向の軸を中心に回転する回転手段265と、を有する測定ユニットを備え、型板測定モード時に、測定子軸の背面を型板のエッジに接触させるように回転手段及びXY移動手段を制御する制御手段と、保持ユニットのXY方向の位置情報、回転手段の回転情報及び傾斜角の検知情報とに基づいて型板の動径情報を求める演算手段と、を備え、制御手段は、型板の測定途中では、測定済み情報に基づき、測定子軸の背面が型板のエッジに接触したときに測定子軸の傾斜が垂直を維持するように、回転手段及びXY移動手段を制御する。
(もっと読む)
真円度測定装置及びその心ずれ量補正方法

【課題】測定物の母線と検出点とのずれ量である心ずれ量を算出して補正することにより、基準となる測定物の直径値とは異なる直径値を有する測定物であっても正確な直径値を算出する。
【解決手段】測定物の中心と回転の中心を一致させて、測定物を検出器に対して相対的に回転させ、測定物の真円度を測定する真円度測定装置において、直径値既知の基準測定物と前記検出器を前記基準測定物の母線と平行に相対的に移動して前記基準測定物の対向する2つの検出点でそれぞれ測定を行い、その測定差を検出する手段と、前記測定差に基づいて、前記基準測定物の母線と前記検出点とのずれ量である心ずれ量を算出する手段と、前記算出した心ずれ量に基づいて、任意の測定物の測定値を補正する手段と、を備えたことを特徴とする真円度測定装置を提供する。
(もっと読む)
真円度測定装置及びその心ずれ量補正方法
【課題】心ずれ量を算出して補正することにより、基準測定物とは異なる直径値の測定物の直径値を正確に算出する。
【解決手段】測定物の中心と回転の中心を一致させて、測定物を検出器に対して相対的に回転させ、測定物の真円度を測定する真円度測定装置において、直径値の異なる複数の基準測定物26−1、26−2をそれぞれ測定し、その測定差を検出する手段と、前記測定差に基づいて、前記基準測定物26−1、26−2の母線と前記検出器の前記基準測定物に対する検出点とのずれ量である心ずれ量Yを算出する手段と、前記算出した心ずれ量Yに基づいて、任意の測定物の測定値を補正する手段とを備えた。
(もっと読む)
工作機械用測定方法
【課題】機械上の被加工物を工作機械の制御器に保存されたプログラムを利用して、高速に、正確に、且つ容易に被加工物を測定することを可能にする工作機械上の被加工物を測定する方法を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。前提の機械位置の値と実際の値との間の誤差を補償するためにいくつかの方法が記載されている。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。 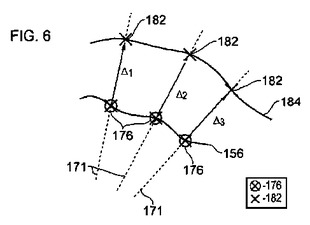 (もっと読む)
(もっと読む)
座標測定デバイス
可搬型の座標測定デバイスが、提供される。座標測定デバイスは、少なくとも1つのアームを含む。一端に磁気部材を含むブラケットが、アームに結合される。プローブが、アームの一端に回転可能なように結合され、プローブは、第1の側面に第1の鉄部材を含み、プローブは、第1の位置と第2の位置の間を動くことができ、鉄部材は、第2の位置にあるときに磁石に近接する。 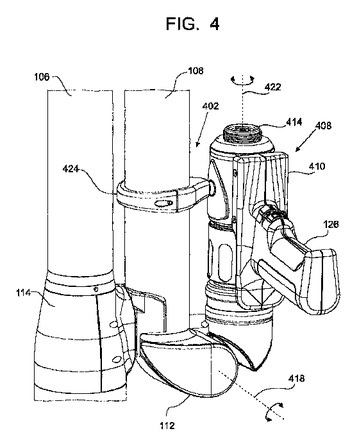 (もっと読む)
(もっと読む)
傾斜計を用いて関節アーム座標測定機の取り付けの安定性を評価するための方法
可搬型の関節アーム座標測定機が、基部と、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含む、アーム部と、トランスデューサからの位置信号を受信する電子回路と、基部に結合された第1の傾斜計であって、基部の傾斜の角度に応じた第1の電気信号を生成するように構成された、第1の傾斜計と、第1の傾斜計の第1の読み取り値および第1の傾斜計の第2の読み取り値を記録するように構成された電気的システムであって、第1の読み取り値が、基部に加えられた第1の力および取り付け構造に加えられた第3の力のうちの少なくとも1つに応じたものであり、第2の読み取り値が、基部に加えられた第2の力および取り付け構造に加えられた第4の力のうちの少なくとも1つに応じたものである、電気的システムとを含む。 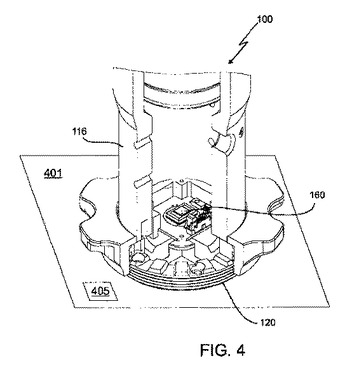 (もっと読む)
(もっと読む)
内径測定装置及びその内径測定装置を用いた管路内径測定システム
【課題】管路内走行時に管の正確な内径を測定できる内径測定装置及びその内径測定装置を用いた管路内径測定システムを提供する。
【解決手段】本体部及び本体部を既設管路の内部で走行可能に支持する本体支持部、本体部に配設されて既設管路の内径を計測する内径測定部を備える内径測定装置において、内径測定装置の重心位置を、内径測定装置の既設管路への導入状態における中央位置に対して下方へ偏位させる。これにより、既設管路内を走行中の内径測定装置に振動等が付与されることに起因する内径測定装置の内壁に沿った旋回しながらの走行が抑制される。その結果、内径測定部による計測の軌跡が管路の軸線に平行するので、既設管路の正確かつ精密な内径測定が達成される。
(もっと読む)
光学式やタッチプローブ型の測定機構部及び軸体支持機構部を有する軸体測定装置及び該装置による軸体の諸元及び精度の測定方法
【課題】 一体構造の装置で任意の形状の軸体の各部の諸元,精度等を効率的に、かつ高精度に測定できる軸体測定装置及びそれによる軸体の諸元及び精度の測定方法を提供する。
【解決手段】 軸体測定装置100は軸体200の外径,真円度,振れ,偏芯,キズ等を測定する光学式測定機構部1と、軸体200の幅寸法や振れ等を測定するタッチプローブ型測定機構部2と、軸体200を支持する軸体支持機構部3と、これ等の制御部4等を一体構造に配置したものからなる。また、タッチプローブ型測定機構部2の接触子2a等の位置調整等を行う接触子補正具7が設けられている。また、測定方法の1つとして外径寸法は軸体200に光学式測定機構部1の投光部1aから光線を当てて通過光線を受光部1bで測定することにより容易に求められる。
(もっと読む)
誤差補正方法及びこれを用いた部品測定方法
【課題】本発明は、測定装置のコストを低減し、且つ測定精度を保障する誤差補正方法及びこれを用いた部品測定方法を提供する。
【解決手段】前記誤差補正方法は、プローブ及びガイドを備える測定装置を提供するステップと、ガイドの真直度誤差を測定して補正するステップと、プローブの取付傾斜角をフィッティングするステップと、プローブの形状誤差を計算するステップと、系統誤差補正プログラムを生成するステップと、を含む。前記部品測定方法は、前記誤差補正方法を通して系統誤差補正プログラムを生成するステップと、曲面又は曲線を有する部品を提供するステップと、前記測定装置を使用して、部品の曲面又は曲線を測定するステップと、ガイドの真直度誤差を測定して補正するステップと、プローブの取付傾斜角による誤差を補正するステップと、プローブの形状誤差を補正するステップと、プログラムにより測定誤差を生成するステップと、を含む。
(もっと読む)
眼鏡レンズ枠形状測定装置
【課題】眼鏡レンズ枠形状測定装置において、そり角度の大きなレンズ枠の形状測定結果に対して、定量的な補正を可能とする。
【解決手段】演算制御回路52が、入力部56に入力されたそり角度θ1、倒れ角度θ2、倒れ量h、眼鏡レンズ枠LF,RFの縦方向の長さB、定数α,βなどの値により、保持棒3b4,3b6で保持された状態における眼鏡レンズ枠LF,RFの軸ずれの量または角度θ3を求め、測定して得られた眼鏡レンズ枠LF,RFの形状を、求められた軸ずれの量または角度に応θ3じて補正することで、精度のよい測定結果を得る。
(もっと読む)
表面形状測定装置
【課題】高速かつ高精度に倣い測定できる表面形状測定装置を提供する。
【解決手段】倣いベクトル指令部220から発せられた倣いベクトル指令に基づいて駆動機構の動作状態を推定して推定動作状態量を算出する動作推定部300と、動作推定部300にて算出された推定動作状態量に応じて駆動センサの検出値を補正演算する補正演算部400と、を備える。
動作推定部300は、倣いベクトル指令が発せられてから倣いプローブの移動位置に反映されるまでの信号伝達特性であるノミナルモデルが設定されたノミナルモデル設定部311を有し、補正演算部400は駆動中の駆動機構が変形することによって生じる測定誤差を補正する補正量を推定動作状態量に基づいて算出する補正量算出部420と、駆動センサおよび検出センサによる検出値と補正量算出部420にて算出された補正量とを合成して測定データとする測定データ合成部430と、を備える。
(もっと読む)
三次元形状測定装置
【課題】スタイラス軸方向のフォーカス変位と傾斜角度を精度良く、スタイラス質量をほとんど増やさず、信頼性良く検知できる三次元形状測定装置を提供する。
【解決手段】互いに直交する方向に偏向した太い光束径のフォーカス検出光213と細い光束径の傾き測定光221を偏光プリズム37で合成し、スタイラスに貼られたミラー123にレンズ14で集光し、反射光を偏光プリズム37で異なる光路に分離し、フォーカス検出光の反射光からスタイラス軸方向変位を光検出器34で検出し、傾き測定光の反射光からスタイラス軸方向傾斜角度を傾斜角度検出部222で測定する。
(もっと読む)
蛇行検知装置及び画像形成装置
【課題】無端ベルトの蛇行を検知して色ずれを防止できる画像形成装置を提供する。
【解決手段】複数の感光ドラム51に形成されたトナー画像を周回する無端ベルトから成る中間転写体61上に重ね合わせて順に転写する画像形成装置1において、中間転写体61の蛇行を検知する蛇行検知装置80を備え、蛇行検知装置80は、支持部82により支持されるとともに中間転写体61の側面61aに接触する開放端81aがこれに追随して傾斜角度を変える接触子81と、接触子81に一体に設けられて光を反射する反射部83と、反射部83に向けて光を出射する出射部85と、出射部85の両側方に配されるとともに反射部83で反射した光を受光して受光量に応じた信号を出力する第1、第2受光部86a、86bとを有して第1、第2受光部86a、86bの受光量の違いに基づいて中間転写体61の蛇行を検知する。
(もっと読む)
タッチプローブ測定方法および測定装置
【課題】機械の熱変位を異物噛み込みと誤判定することを防止する。
【解決手段】ワークWにおける軸部Waの外周面の円周方向3点に、タッチプローブ13を接触させてこれら3点の位置座標を測定し、この3点の測定位置に基づいて軸部Waの中心位置座標を算出する。この際、算出した中心位置座標と外周3点の測定位置との間の寸法により軸部Waの直径を算出し、この算出した直径値により、タッチプローブ13による異物噛み込みが発生しているかどうかを判定する。
(もっと読む)
寸法計測装置
【課題】例えば円錐面を含む穴の深さ位置を計測する寸法計測装置において、被測定穴の軸線と計測装置側の接触ステムの軸線の整列を確実に実施すること。
【解決手段】寸法計測装置は、スピンドル51を具備する直線寸法測定器50と、被測定物10に接する球状の先端部64を有する接触ステム60と、接触ステム60を支持するステム保持装置70と、直線寸法測定器50とステム保持装置70とを往復移動させる駆動部90と、を具備し、ステム保持装置70は、接触ステム60を測定軸線Ax方向に移動可能に支持する軸受部材71と、接触ステム60と軸受部材71とを互いに反対方向に付勢する付勢手段75と、軸受部材71の一端面72aに平行に対向するスラスト支持平面78aを有するスラスト支持部材76と、スラスト支持平面78aと軸受部材の一端面72aとの間に配設された複数の球体80と、を具備する。
(もっと読む)
位置測定装置用の伸長可能な脚部アセンブリ
座標測定機など測定機用の伸長可能な脚部アセンブリ(8;30)を記載する。伸長可能な脚部アセンブリ(8;30)は、第1の端部および第2の端部を備え、第1の端部と第2の端部の間の間隔を測定するための計測装置を備える。計測装置は、低い熱膨張係数を有する1つまたは複数の細長計測部材(44、46;76、78)を備える。伸長可能な脚部アセンブリ(8;30)は、枢動接合部によって、1つまたは複数のプラットホーム(4、6;36、38)に取り付けることができる。好ましい一実施形態において、荷重支持構造(50、56)は、脚部アセンブリ(8;30)の計測構造(76、78、80)から機械的に隔離される。 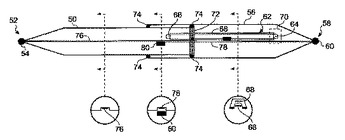 (もっと読む)
(もっと読む)
補正プログラム、及び測定装置
【課題】本発明の目的は、スタイラスで測定されたデータを、より高精度に補正することのできる測定装置を提供することにある。
【解決手段】スタイラス12の測定子25でワーク26(36)上を測定軸方向にトレースして得られたデータの測定誤差を補正する補正機構18を備え、該補正機構18は、補正対象面内で該スタイラス12を運動させ、該スタイラス12の高さ方向位置に応じた測定子25位置のずれ情報を含む校正測定データを得る校正測定手段14と、該記測定子位置のずれ情報を補正するのに最適な予め所定数に分割された高さ方向測定範囲の各領域毎の補正パラメータの値を同時に求める補正パラメータ設定手段32と、測定データの高さ方向値に基づき特定された該測定データの属する領域において最適な補正パラメータの値で該測定データを補正するデータ補正手段34と、備えたことを特徴とする測定装置10。
(もっと読む)
測定方法、及び測定装置
【課題】本発明の目的は、使い勝手に優れた測定装置を提供することにある。
【解決手段】スタイラス16を備えた測定装置10において、該スタイラス16は運動平面内でアーム30の円弧歪による誤差を生じるであろうピボット式とし、該ワーク12は対象面設計値を持っており、該測定子26を位置決めする対象面14上の特定位置を形状特定点32に対応する支点28位置を基準に測定軸方向値で指示し、これを初期値とする入力手段18と、予め得ておいた該対象面設計値情報及び該円弧歪誤差情報に基づいて該初期値に対応する該円弧歪による誤差を推定し、該初期値から該誤差が補正された決定値を求める決定手段20と、該スタイラス16とワーク12との相対移動を行う駆動手段22と、該決定値に基づいて該スタイラス16と該ワーク12との位置決めがなされるように該駆動手段22を制御する制御手段24と、を備えたことを特徴とする測定装置10。
(もっと読む)
補正方法、及び測定装置
【課題】本発明の目的は、スタイラスで測定されたデータを、より高精度に補正することのできる測定装置を提供することにある。
【解決手段】ワーク18に追従して変位するスタイラス12を備えた測定装置10において、高さ検出軸と移動軸とで規定される補正対象面における測定子16位置の、高さ検出軸方向値に応じた移動軸方向へのずれを補正する補正機構26を備え、該補正機構26は、該スタイラス12を運動させ、該スタイラス12の高さ検出軸方向値に応じた移動軸方向値のずれ情報を含む校正測定データを得る校正測定手段14と、該スタイラス12のずれ情報に基づいて該垂直降下誤差による誤差を補正するのに最適な垂直誤差補正パラメータの値を求める補正パラメータ設定手段28と、該補正パラメータで測定データを補正する測定データ補正手段30と、を備えたことを特徴とする補正方法10。
(もっと読む)
1 - 20 / 23
[ Back to top ]