
Fターム[2F063CB00]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 補償、補正、調整、調節 (232)
Fターム[2F063CB00]の下位に属するFターム
検出器出力の温度補償 (62)
測定対象物、検出器の熱膨張補正 (7)
検出器出力の基準点、零点調整(測定前) (17)
検出器出力の基準点、零点補償(測定中後) (16)
検出器出力の非直線性の補償、直線化 (30)
検出器出力のヒステリシス補償 (6)
検出器出力のクリープ補償
検出器の感度調節 (14)
接触圧の調整 (3)
傾斜の補正 (5)
フィーラー端子の形状、大きさの補正
位置ずれの補正 (30)
振動補正 (3)
オーバーラン補正
摩耗の補正 (2)
測定系の検査、試験、較正 (19)
特定されたその他のもの (10)
Fターム[2F063CB00]に分類される特許
1 - 8 / 8
磁界角計測装置およびそれを用いた回転機
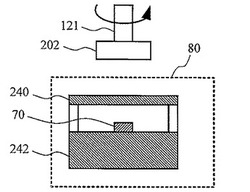
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、非磁性の第1の導体240と、非磁性の第2の導体242とを備えた磁界角計測装置であって、前記磁気センサは、前記第1の導体と前記第2の導体との間に配置され、前記第1の導体中の渦電流が前記磁気センサに及ぼす磁界と、前記第2の導体中の渦電流が前記磁気センサに及ぼす磁界とが、互いに打ち消しあう構成とする。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置

【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転に応じて変化する回転磁界を感知し被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジ14〜17から出力される出力信号をハーフブリッジ14〜17毎に取得し、位相ずれαを補正するための位相補正値φを算出する。メモリ部52は、位相補正値φを記憶する。制御部51は、位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子21〜28の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
バリアブルリラクタンス型角度検出器
【課題】出力精度を向上させつつも容易に製造することが可能なバリアブルリラクタンス型角度検出器を提供する。
【解決手段】余弦相出力巻線は、各余弦相出力コイル25における誘起電圧25eの分布が周方向において正弦波状となるように構成される仮想巻線状態から、誘起電圧25eの和が余弦相出力電圧と同周期となる組み合わせの余弦相出力コイル25を省略した態様で巻回される。
(もっと読む)
回転角度検出装置および回転機
【課題】回転角度の検出精度が高い回転角度検出装置および回転機を提供する。
【解決手段】N極対の磁極を有する磁石回転子(但し、Nは2以上の整数である。)と、前記磁石回転子から印加される磁束に応じて磁石回転子の回転角度を検出するための2個のホールセンサとを備え、 前記2個のホールセンサは、感磁軸を前記磁石回転子の径方向に向けて配置した径方向用ホールセンサと、感磁軸を前記磁石回転子の周方向に向けて配置した周方向用ホールセンサとで構成され、
前記径方向用ホールセンサが受ける磁束密度成分の振幅と前記周方向用ホールセンサが受ける磁束密度成分の振幅とが同じになるように、前記径方向用ホールセンサ及び前記周方向用ホールセンサが配置されていることを特徴とする回転角度検出装置。
(もっと読む)
少なくとも1個の磁性体の非接触の定義された運動のための構造
本発明は、少なくとも一次元で運動自在な少なくとも1個の磁性体(20)の非接触の定義された運動のための構造に関する。位置決めや方向決めだけでなくエネルギーの発生や伝達のための汎用用途のこの種の構造であって、占有容積を減少させた単純な構造は、定義された様に動く少なくとも1個の永久磁石(13)の一次磁界内に、所定の磁気モーメントを有する磁性体(20)を配置することで達成できる。一次磁界と位置合わせされた二次磁界が磁性体(20)から延在している。磁性体(20)のそれぞれの位置における二次磁界を記録するために、少なくとも1個の磁界センサ(17)が設けられている。 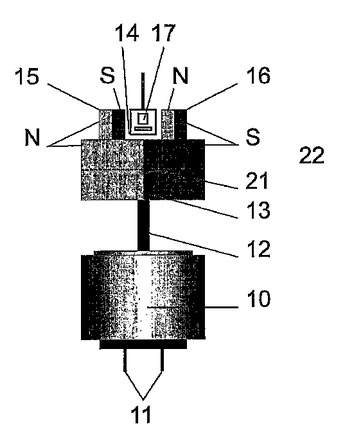 (もっと読む)
(もっと読む)
ひずみ測定方法およびひずみ測定装置
【課題】 被測定対象物のひずみを正確に推定することができるひずみ推定方法およびひずみ推定装置を提供する。
【解決手段】 解析モデル作成手段15は、被測定対象物2に歪みゲージ3が貼付けられた状態を模擬する第1解析モデル22を作成する。シミュレーション手段16は、第1解析モデル22を用いて、被測定対象物2に力を加えたときの被測定対象物2および歪みゲージ3のひずみを算出する。解析モデル作成手段15は、算出した歪みゲージ3のひずみと、実際に測定した歪みゲージ3のひずみとの差が許容誤差の範囲内になるように第1解析モデル22を補正する。解析モデル作成手段15は、補正した第1解析モデル22に基づいて、被測定対象物2のみを模擬する第2解析モデル23を作成する。シミュレーション手段16は、第2解析モデル23を用いて、被測定対象物2に力を加えたときの被測定対象物2のひずみを算出する。
(もっと読む)
不平衝容量の検出装置、及びセンサの不平衝容量の検出方法、並びにこれらに用いる変換器
【課題】 歪ゲージナ等のセンサと測定装置本体をつなぐケーブルの変形振動により発生する容量変動分を計測時に取り除くセンサ不平衝容量の検出装置及びセンサの不平衝容量検出方法、並びにこれらに用いるセンサを得る。
【解決手段】 センサ1にケーブル4A〜4Dを接続して、歪量等の計測時にセンサの容量バランスが崩れた時の大きさに比例した容量分検出電圧Ecを発生させ、この容量分検出電圧Ecとブリッジ構成のセンサ1に供給する搬送波電圧BVを乗算器16等で演算して、容量バランスの崩れに比例した補正電圧を発生させ、センサ1やケーブル4A〜4Dの不平衝容量を相殺させる。
(もっと読む)
誘導性センサ
対象物たとえば人間の指の温度または存在などの外部パラメータを検知するセンサは、(i)励起コイル(68、70)と、(ii)励起信号を生成するように動作することができ、生成された励起信号を励起コイルに加えるように構成される信号発生器(41、61、62、63)と、(iii)信号発生器により励起信号が励起コイルに加えられるのに応答して、電気信号がセンサ・コイルに生成されるように、通常受動共振回路の形で中間装置またはターゲット(74)を介して励起コイルに電磁的に結合することができるセンサ・コイル(74)と、(iv)センサ・コイル内で生成される周期的な電気信号を処理して、検知されるパラメータを表す値を決定する信号プロセッサとを備える。たとえば、PTC抵抗またはNTC抵抗、あるいは対象物が近接することによって影響を受けるコンデンサを備えることにより、中間装置は、検知すべきパラメータに敏感であり、その結果、センサ・コイル内で生成される周期的な電気信号は、パラメータの影響を受ける。やはり、センサは、たとえば中間装置における追加の共振回路によって、実質上励起信号と同じ周波数で更なる信号を生成することができ、信号プロセッサは、センサ・コイル内で生成される周期的な信号、および更なる信号から外部パラメータの値を決定する。たとえば、センサは、オペレータがいつ接触するかを検出するために、接触作動式の構成部品のアレイにおいて使用することができる。  (もっと読む)
(もっと読む)
1 - 8 / 8
[ Back to top ]