
Fターム[2F063CB03]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 補償、補正、調整、調節 (232) | 検出器出力の基準点、零点調整(測定前) (17)
Fターム[2F063CB03]に分類される特許
1 - 17 / 17
回転角検出装置、および、これを用いた電動パワーステアリング装置
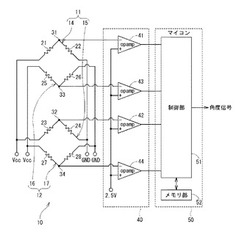
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
チェンジレバーの位置検出装置、これを備えたチェンジレバーユニット、およびチェンジレバーの位置検出方法

【課題】より簡単の構造でチェンジレバーの位置を精度よく検出する。
【解決手段】チェンジレバーのシフト方向の3つのレンジとチェンジレバーのセレクト方向の3つのレンジとにおけるマグネット2の磁気に対応して出力するホール素子3の電気的シフト位置信号値および電気的セレクト位置信号値をセンサ特性値としてホール素子のメモリに記録する。各レンジ間においては、ホール素子3は、隣接する電気的シフト位置信号値どうしを結ぶシフト側仮想直線および隣接する電気的セレクト位置信号値どうしを結ぶセレクト側仮想直線を用いてセンサ特性値として、ホール素子3の位置に対応した電気的シフト位置信号値および電気的セレクト位置信号値を補完出力する。これにより、種々のばらつきが生じていても、チェンジレバーの位置を精度よく検出可能となる。
(もっと読む)
膨潤試験装置及び膨潤試験方法
【課題】吸湿すると膨張するだけでなく変形し得る試料に対しても正確に膨張率を測定できる膨潤試験装置及び膨潤試験方法を提供する。
【解決手段】膨潤試験装置10は、試料Sの一端部が基準位置に維持された状態で吸湿したときに試料Sの形状を維持する形状維持手段16と、吸湿による試料他端部の初期位置からの変位又はそれに伴う被検知部39の変位を検出する渦電流式変位センサ14と、渦電流式変位センサ14による検出結果に応じて試料Sの膨張量又は膨張率を導出する導出手段20aとを備えている。
(もっと読む)
特にCPR時の胸部パラメータを測定する方法及びシステム
本発明は、人、特に人の胸部に配置される測定部の位置を監視するシステムに関し、本システムは、所定の周波数で振動する磁界を発生し、例えば、胸部から背中までのような人の反対側に位置するように構成される駆動部を含み、測定部は、磁界強度を測定するように構成され、システムは、測定部と駆動部との距離を算出する算出手段を含む。 (もっと読む)
回転角検出装置及び電動パワーステアリング装置
【課題】高い検出精度を有するとともに、構成簡素且つ省電力にて、連続的に検出対象の絶対角を検出することのできる回転角検出装置を提供すること。
【解決手段】ECU11(マイコン21)は、ステアリングセンサが出力する正弦信号S_sin及び余弦信号S_cosに基づいて、絶対角である操舵角θsを検出する。また、ECU11は、正弦信号S_sin及び余弦信号S_cosに基づいて、所定の回転角(電気角)に対応したエッジを有するとともにそれぞれの各エッジに対応する所定の回転角が互いに重複することなく且つ均等間隔となるように設定された三相のパルス信号P1,P2,P3を生成する三相パルス生成器30を備える。そして、マイコン21は、これらの各パルス信号P1,P2,P3に基づいて操舵角(第2操舵角θs´)を演算する第2の回転角検出手段としての機能を備える。
(もっと読む)
磁気センサを位置決めするための方法及びセンサ
【課題】出力マグネットがピストンに付いているエアシリンダに沿って、磁気センサをセンサ規定位置に精度よく位置決めするための方法の提供。
【解決手段】以下のステップでセンサ10の位置決めを行う。a)スライド移動経路に沿ってセンサ10と出力マグネット12を、互いに相対的にスライド移動する。b)スライド移動中に、センサ−出力マグネット12の間隔により決まる測定信号を検知する。c)センサ規定位置を求める。d)センサ規定位置を表示する。e)センサ規定位置にセンサ10を固定する。
(もっと読む)
モーション検出装置及びモーション検出方法
【課題】使用環境に制限が少なく、簡素な構成の静電容量式モーション検出装置及びそれを用いた入力装置を提供すること。
【解決手段】駆動電圧を印加する第1の駆動電極5と第1の駆動電極5の両側に第1の駆動電極5との間にそれぞれ静電容量を形成するように配置される第1の検出電極対6、7とからなる第1センサ部3と、第1の駆動電極5と略直交して配置される第2の駆動電極8と第2の駆動電極8の両側に第2の駆動電極8との間にそれぞれ静電容量を形成するように配置される第2の検出電極対9、10からなる第2センサ部4と、第1のセンサ部3の静電容量の変化で検出される第1差分値と前記第2センサ部4の静電容量の変化で検出される第2差分値とを用いて被検出体の各種モーションを検出する。
(もっと読む)
静電容量型距離センサ及び静電容量センサを備えた車高測定装置
【課題】静電容量の変化量に基づいて被測定面と静電容量センサとの間の距離を正確に測定することのできる静電容量型距離センサを提供すること。
【解決手段】静電容量センサ1により検出された静電容量の変化を検出電圧に変換する第1のCV変換器3と、被測定面Aからのオフセット距離に応じたオフセット容量を検出電圧に変換する第2のCV変換器6と、第1のCV変換器3と第2のCV変換器6からの差分電圧を検出する差分増幅器5とを備えている。静電容量の変化量に基づいて被測定面Aと静電容量センサ1との間の距離を正確に測定することができる。また、オフセット距離をメカニカルな機構によらずに非接触方式で直接的に測定が可能となる。
(もっと読む)
非接触式回転角度検出センサ装置およびその出力補正方法
【課題】
低コストで回転角測定精度の向上した非接触式回転角度検出センサを提供すること。
【解決手段】
5次以上の多項式にて近似して得られた補正定数に基づいて角度を算出する、GMR素子及び信号処理手段及び磁界発生手段を含むセンサの個体差を補正する補正手段を備える。組立て後、基準回転角度信号と実測出力とを比較して温度依存性の低い補正係数で、実測出力信号を補正する。
【効果】
低コストで回転角測定精度の向上した非接触式回転角度検出センサを実現することができる。
(もっと読む)
センサ信号検出回路及びセンサモジュール
【課題】製造コストが安価なセンサ信号検出回路を提供する。
【解決手段】検知結果に応じて2つの電圧信号を出力するセンサ2と接続され、2つの電圧信号の電圧差に応じたセンサ信号を出力するセンサ信号出力部6と、当該センサ信号から直流成分を除去するオフセット除去フィルタ8と、を含むセンサ信号検出回路である。
(もっと読む)
研磨監視方法および研磨装置
【課題】研磨装置の運転を停止させることなく渦電流センサの較正を行うことができ、精度の高い膜厚監視を可能とする研磨監視方法および研磨装置を提供する。
【解決手段】基板の水研磨時、研磨パッド10のドレッシング時、または研磨パッド10の交換時において、渦電流センサ50の出力信号を補正信号値として取得し、補正信号値から補正基準値を減算して補正量を算出し、導電膜を有する他の基板を研磨しているときの渦電流センサ50の出力信号から補正量を減算して実測信号値を算出し、実測信号値の変化を監視することにより研磨中の導電膜の厚さの変化を監視する。
(もっと読む)
手持ち式位置決め装置の較正方法と較正装置
位置決め装置(7)の較正装置は、第一測定範囲(2’)を有する少なくとも一つの第一コイル構造(1a)と、第二測定範囲(2a’)を有する第二コイル構造(1a’)を備え、その測定範囲(2a、2a’)において、磁場の大きさに関して特定の比率で均質な交流磁場が生成される。固定距離だけ離されて設けられた位置決め装置(7)の少なくとも2つのアンテナによって磁場が同時に検出されるように、コイル構造(1a、1a’)は特定の距離だけ離されて設けられる。特定可能な比率は、真の距離のパラメータを定義する。  (もっと読む)
(もっと読む)
磁気マッピング装置
【課題】 磁気方式のHMTの使用する上で必要な磁気データの取得を短時間で行うことができる磁気マッピング装置を提供する。
【解決手段】 磁気ソース2と、支持体16と、支持体に取り付けられ磁界中の磁気データを測定する磁気センサ3と、支持体の外表面に取り付けられ磁気センサに対する位置が固定された少なくとも3つのマーカ群18と、3つのマーカを同時にステレオ視するための一対のカメラ12、14と、一対のカメラで撮影された各画像に同時に映る3つのマーカの画像上の位置に基づいてこれら3つのマーカの位置座標を求めるとともに求めた3つのマーカの位置座標に基づいて磁気センサの位置座標を算出する磁気センサ位置算出部21と、算出された磁気センサの位置座標とカメラ画像の撮影時に測定された磁気データとに基づいて位置座標と磁気データとを対応付けた磁気マッピングデータを蓄積する磁気マッピング部22とを備える。
(もっと読む)
接触式変位計
【課題】接触子が破損したことを簡単な構成で検知することが可能な接触式変位計を提供する。
【解決手段】最初に、接触子1aが破損していないことを予め確認する。次に、接触子1aがマスターワークMW上に接触した状態で、最初のプリセット信号PRが与えられる。それにより、CPUは基準値をEEPROMに記憶させる。接触子1aが良品の対象物W上に接触した状態でタイミング信号TMが与えられると、CPUは測定値を取得するとともにその測定値を基準値で補正する。実際の対象物Wの測定時に得られた基準値と、EEPROMに記憶された前の基準値との差が所定値以上である場合に、接触子1aに破損が生じたとみなし、警告信号が出力される。この警告信号として、判定信号Hiおよび判定信号Loが共にローレベルからハイレベルとなる。
(もっと読む)
回転角検出センサの基準点補正方法
【課題】 別途調整工程を設けることなく、複数の回転角検出センサの検出基準点を補正する回転角検出センサの基準点補正方法を提供すること。
【解決手段】 操舵軸11に組み付けられた2個一対のレゾルバ11b,11cの検出基準点を補正する補正方法を、回転角検出工程、1次補正工程、可動範囲検出工程および2次補正工程で構成した。回転角検出工程は、組み付け直後のレゾルバ11b,11cからの出力値から操舵軸11の回転角を検出する工程である。1次補正工程は、回転角の検出基準点を暫定的に補正する工程である。可動範囲検出工程は、1次補正工程で補正された基準点に基づき操舵軸11の可動範囲を検出する工程である。2次補正工程は、操舵軸11の回転角0゜とレゾルバ11b,11cからの信号に基づき検出した回転角との相違量に基づき、検出基準点を最終的に補正する工程である。
(もっと読む)
歪ゲージ装置
【課題】歪み量の測定精度を向上させた歪ゲージ装置を提供すること。
【解決手段】絶縁部材100と、この絶縁部材100に接合した抵抗体200とを具備した歪ゲージ装置において、抵抗体200が、両側で折り返して往復する往復パターン111と、この往復パターン11と電気的に接続し、周囲が抵抗体で囲まれた抵抗体のない穴C1〜C11を設けた抵抗調整パターン112とを有している。
(もっと読む)
生体のリハビリ用姿勢モニタリング方法及び装置
【課題】本発明は、3軸加速度計及び3軸角速度計から得られた6軸データの静止状態の零点誤差を補正することにより、動作を正確に測定することを目的とする。
【解決手段】本発明による生体のリハビリ用姿勢モニタリング方法及び装置は、姿勢モニタ部(61)に設けた3軸加速度計(65)及び3軸角速度計(66)から得た6軸データ(62)を慣性演算部(63)に入力し、6軸データ(62)の静止状態(M,N)の零点誤差を補正して高精度に生体(50)の動作を測定する方法と構成である。
(もっと読む)
1 - 17 / 17
[ Back to top ]