
Fターム[2F065AA09]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 移動量 (898)
Fターム[2F065AA09]に分類される特許
1 - 20 / 898
薄膜形成装置及び薄膜形成方法
三次元座標測定装置、三次元座標測定方法、及びプログラム
電子機器
対象検出装置および対象検出方法
【課題】より広範囲かつ高速に対象を検出することが可能な対象検出装置および対象検出方法を提供する。
【解決手段】対象検出装置101は、検出対象の物性に応じて予め選択された複数の波長帯について、2次元画像を撮像するための撮像部11と、2次元画像の各画素における物質を検出するための検出部12とを備え、撮像部11は、設定されたラインごとに2次元画像を撮像する。
(もっと読む)
変位測定方法および変位測定装置

【課題】特異な輝度を持つ画素に影響されない重心位置算出を行い、変位測定の精度を向上する変位測定方法および変位測定装置を得る。
【解決手段】計測対象1にスリット光3を照射するスリット光照射装置2と、スリット光3を計測対象1に照射することによって生成される光切断線4を撮影するカメラ5と、カメラ5により得られた光切断線像から計測対象1の変位を求める画像処理装置7と、を備え、画像処理装置7は、カメラ5により得られた光切断線像の重心位置演算方向の各画素の輝度を最小二乗法で理想的な輝度分布に近似させた後、さらに輝度値と近似値の差分を用いて重み付き最小二乗法で理想的な輝度分布に再近似させ、その分布の期待値から光切断線像の重心位置を算出して計測対象1の変位を求める。
(もっと読む)
下水圧送管路におけるピグ位置検出装置
【課題】下水圧送管路内に走行させて堆積物等を除去する洗浄用ピグの走行位置を検出する場合、管路途中でピグが停止した場合は、その位置を正確に検出することが出来なかった。
【解決手段】下水圧送管路1の内壁面に、管路内を走行する洗浄用ピグ7が接触するようにセンサ用光ファイバ2を配設し、光学式温度センサ本体3からセンサ用光ファイバ2にパルス光を入射させ、センサ用光ファイバから出射される後方散乱光を測定系に導いてセンサ用光ファイバの長手方向の温度を測定し、ディスプレイ装置5に測定した温度情報を監視画面6として表示する。走行する洗浄用ピグ7がセンサ用光ファイバ2に接触して生じる摩擦により発生した熱の温度を光学式温度センサ本体で測定することにより、洗浄用ピグ7の走行位置を監視する。
(もっと読む)
ゴム摩擦試験方法及びゴム摩擦試験装置
【課題】ゴム試験片の接触面形状を得るとともに接触面内の歪み分布を算出することで、ゴム試験片の摩擦摩耗特性を適切に評価できるゴム摩擦試験方法及びゴム摩擦試験装置を提供する。
【解決手段】本発明のゴム摩擦試験方法は、ドーナツ状のゴム試験片1の外周面11に画像解析用パターン13を形成するパターン形成工程と、ゴム試験片1の外周面11を、円筒部21が透明材料で形成された回転式ドラム2に接触させつつ、ゴム試験片1及び回転式ドラム2を回転させる摩擦試験工程と、摩擦試験工程と同時に、外周面11を円筒部21を通して撮影して外周面画像11Pを取得する画像取得工程と、取得した外周面画像11Pからゴム試験片1の接触面形状を得るとともに、外周面画像11Pに含まれる画像解析用パターン13に基いてゴム試験片1の接触面内の歪み分布を算出することにより、ゴム試験片1の摩擦摩耗特性を評価する評価工程と、を備える。
(もっと読む)
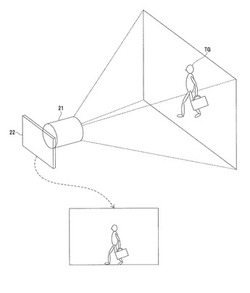
移動距離計測装置、移動速度計測装置及びこれらを用いた撮像装置
【課題】対象物(被写体)の位置及び移動方向に限定されることなく、移動する対象物を撮像することによって、その対象物の移動距離を計測すること。
【解決手段】移動している被写体を撮像して、前記被写体の移動距離を計測する移動距離計測装置であって、撮像する位置から前記被写体までの距離に関する距離データを取得する測距手段と、撮像レンズを用いて、所定の時間間隔で前記被写体を撮像して、複数の画像を生成する画像生成手段と、前記距離データに基づいて前記複数の画像のうちの任意の2つの画像の前記被写体の位置に関する位置データを算出し、該位置データに基づいて前記撮像レンズの光軸の方向に対して垂直な平面に関する被写体の移動距離を算出する算出手段とを有することを特徴とする移動距離計測装置により上記の課題が達成される。
(もっと読む)
キャリブレーション方法および基板検査装置
【課題】撮像装置とキャリブレーションマークとの位置関係に係わらず、撮像装置をキャリブレーションするに十分な、キャリブレーションマークの撮像画像を取得する。
【解決手段】単一のキャリブレーションマークを複数回撮像することによって、複数の基準マークが配置されたキャリブレーションを撮像したときと同様の画像マークを取得し、この画像マークに基づいて撮像装置について中心位置、取り付け角度、分解能等のキャリブレーションを行う。単一のキャリブレーションマークを異なる撮像位置で複数回撮像して画像マークを取得する撮像工程と、複数回の撮像で取得したキャリブレーションマークの各画像マークを用いて、複数個の画像マークを有した撮像画像を形成する撮像画像形成工程と、撮像画像の画像マークの位置と撮像画像上の基準位置とに基づいて、撮像装置のキャリブレーション情報を算出するキャリブレーション情報算出工程とを備える。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
変位センサ
【課題】被測定物の表面の反射の状態によって、変位センサの測定方式を切り換えたり、変位センサを交換したりすることを不要にする。
【解決手段】拡散反射板212は、レーザ光源231から出射され、ワーク102の加工面で正反射されたプローブ光が入射する位置に配置されている。リニアセンサ233は、拡散反射板212により拡散反射されたプローブ光がさらにワーク102の加工面で反射された第1の反射光、レーザ光源231から出射されたプローブ光がワーク102の加工面で拡散反射された第2の反射光を受光する。信号処理部234は、第1の反射光によりプローブ光がワーク102の加工面を介して拡散反射板212に入射するまでの第1の距離を検出するか、または、第2の反射光によりプローブ光がワーク102の加工面に入射するまでの第2の距離を検出する。
(もっと読む)
物体の光干渉測定装置および光干渉測定方法
【課題】さらに付加的な情報の取得が可能で、かつ堅牢な装置構造と高度な測定精度とを有する光干渉測定技術の提供。
【解決手段】光干渉測定装置は、光源1からの出発ビーム2を測定ビーム3と第1の参照ビーム4aとに分割するビームスプリッタ5aと、光の重ね合わせ手段と、第1の検出器8aとを備える。重ね合わせ手段と第1の検出器8aとは互いに連携する。物体7によって反射された測定ビームと第1の参照ビームとが第1の検出器の検出面で重ね合わされる。ビームスプリッタ5aは、出発ビーム2を測定ビーム3と、第1の参照ビーム4aと、少なくとも第2の参照ビーム4bとに分割する。重ね合わせ手段と互いに連係する第2の検出器8bが備えられ、物体7によって散乱させられた第1の受信ビーム4b’としての測定ビームと第2の参照ビーム4bとが第2の検出器8bの検出面で重ね合わされる。
(もっと読む)
検出装置
【課題】可及的にワークの移動が自由であり、後工程の作業の妨げともなりにくい簡易な構成のワーク位置の検出装置を提供する。
【解決手段】検出光(40)を投光する投光部(10)と、検出光を受光する受光部(20)と、投光部と受光部を所定の位置関係に保つ支持手段(30)と、を備え、受光部が一次元又は二次元に配置された複数の受光素子を含み、上記支持手段が、投光部と受光部との間に設けられる検出基準面に対して検出光(40)が斜めになるように投光部と受光部の位置を保持する。
(もっと読む)
露光装置、及びデバイス製造方法
【課題】移動体の位置情報を精度良く計測できる位置計測装置を提供する。
【解決手段】位置計測装置は、移動面内を移動する移動体の位置情報を計測する。位置計測装置は、移動体の第1面に配置された移動格子に光を照射する光源と、光源との位置関係が固定で、移動格子で回折された光が入射する第2面を有し、入射した光を回折又は反射して移動格子に戻す固定光学部材と、移動格子を再度介して干渉された光を検出する検出装置と、を備え、第1面と第2面とはほぼ平行である。
(もっと読む)
コークス炉の炉壁診断方法およびコークス炉の炉壁補修方法
【課題】老朽化したコークス炉における炭化室の炉壁の変形状態(壁面の凹凸、窯幅の変化)を、炭化室内部に測定装置を入れることなく、炭化室外部から簡便に精度良く測定することができるコークス炉の炉壁診断方法およびコークス炉の炉壁補修方法を提供する。
【解決手段】炭化室10の外側にレーザー式3次元形状測定装置20を配置し、レーザー式3次元形状測定装置20によって、蓋12をとった状態の窯口11から斜めにレーザー21を照射して、炉壁(壁面)13の形状を点群として測定する工程を、炭化室10の左右の壁面13a、13bに対して独立して実施した後、左右を独立して測定した壁面の形状を、炭化室10周辺の基準物22を元に合成して、一つの形状データ(点群)にまとめて左右合成炉壁形状とし、その左右合成炉壁形状から左右の壁面間の距離(窯幅)を計算して、炉壁形状(壁面の凹凸、窯幅の変化)の診断を行う。
(もっと読む)
状態検出装置
【課題】被測定対象物のレーザスペックル画像を得る装置において、被測定対象物の材質などに起因するスペックル画像の画質低下を可及的に抑制する。
【解決手段】被測定対象物(20)表面の観察領域(21)に向けてコヒーレント光を投光する投光部(10)と、被測定対象物表面の観察領域で拡散反射した上記コヒーレント光を受光する受光部(30)と、被測定対象物表面から受光部以外の方向に伝播するコヒーレント光を被測定対象物表面の観察領域に戻す反射部(41)と、受光部における受光状態に基づいて被測定対象物の状態を検出する検知部(50)と、を備える。
(もっと読む)
監視装置、プログラム
【課題】ベッドを基準にして監視すべき領域を自動的に検出することにより、監視対象の人の動作を正確かつ再現性よく検出することを可能にした監視装置を提供する。
【解決手段】距離画像センサ10は、画素値が物体までの距離値である距離画像を生成する。距離画像センサ10の視野領域には、監視対象であるベッドの全体を含む。ベッド認識部21は、距離画像センサ10が出力した距離画像を用いてベッドの位置を抽出する。人認識部22は、距離画像センサ10が出力した距離画像のうちベッド認識部21により認識したベッドの範囲内と範囲外とにおいて人が占有する領域を検出する。行動判定部23は、ベッド認識部21により検出したベッドと人認識部22により検出した人の領域との組み合わせによりベッドに対する人の動作を判別する。
(もっと読む)
可動式ホーム柵監視用カメラ装置
【課題】都市部の駅ホームや、地下鉄の駅ホームでは、駅ホームのスペースが狭く、列車の乗降口または可動式ホーム柵の開閉部を広範囲にするための監視用カメラ装置のカメラ部の設置スペースを十分に確保できない。
【解決手段】本発明の可動式ホーム柵監視用カメラ装置は、可動式ホーム柵と、反射鏡と、前記可動式ホーム柵内に設置し前記反射鏡を介して前記可動式ホーム柵を撮像するカメラ部と、前記カメラ部が撮像した画像から乗客を検出する画像処理部と、モニタとを備え、前記画像処理部は、前記カメラ部が撮像した画像から前記可動式ホーム柵の開閉部およびその周辺を切り出して合成した合成画像を作成し、前記モニタは、前記合成画像を表示する。
(もっと読む)
エゴモーション概算システムおよび方法
【課題】エゴモーション概算システムおよび方法の提供。
【解決手段】エゴモーション概算システムを利用してエゴモーションパラメータを決定するためのコンピュータ実施方法であって、第1の画像フレームおよび第2の画像フレームを取得することと、第1の画像フレームの第1の部分を選択して第1のサブ画像を取得し、かつ第2の画像フレームの第2の部分を選択して第2のサブ画像を取得することと、第1のサブ画像および第2のサブ画像に変換を実行して、それぞれ、第1の透視画像および第2の透視画像を取得することと、第2の透視画像を反復的に調整して複数の調整した透視画像を取得することと、第1の透視画像と複数の調整した透視画像との個々の差異それぞれに対応する複数の差分値を決定することと、複数の差分値のうちの1つに対応する、エゴモーションパラメータに関する並進ベクトルを決定することと、を含む、方法。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージに第2の反射手段(35)を取り付け、第2の反射手段(35)のθ方向の位置ずれを検出する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージに取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。第2の反射手段のθ方向の位置ずれの検出結果に基づき、複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージによりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
1 - 20 / 898
[ Back to top ]