
Fターム[2F065FF16]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | エンコーダ利用 (505) | リニア (162)
Fターム[2F065FF16]に分類される特許
1 - 20 / 162
露光装置、及びデバイス製造方法
【課題】移動体の位置情報を精度良く計測できる位置計測装置を提供する。
【解決手段】位置計測装置は、移動面内を移動する移動体の位置情報を計測する。位置計測装置は、移動体の第1面に配置された移動格子に光を照射する光源と、光源との位置関係が固定で、移動格子で回折された光が入射する第2面を有し、入射した光を回折又は反射して移動格子に戻す固定光学部材と、移動格子を再度介して干渉された光を検出する検出装置と、を備え、第1面と第2面とはほぼ平行である。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法

【課題】 エンコーダで位置を計測しつつ、移動体を所望の方向へ精度良く駆動する。
【解決手段】 駆動装置により、ウエハステージWSTのY軸方向の位置情報を計測するエンコーダ62Aの計測値とそのエンコーダによって計測されるスケール39Y1の平面度に関する情報とに基づいて、ウエハステージWSTがY軸方向に駆動される。この場合、駆動装置は、そのエンコーダの計測値に含まれるスケールの平面度に起因する計測誤差をスケールの平面度に関する情報に基づいて補正した補正後の計測値に基づいて、ウエハステージを所定方向に駆動することが可能である。従って、スケールの凹凸に影響を受けることなく、エンコーダを用いてウエハステージを精度良く所定方向に駆動することが可能となる。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】複数のZヘッドを切り換えながら、移動体の高さと傾斜を継続的に計測することにより、移動体を高精度で駆動する。
【解決手段】制御装置は、テーブルWTBの±X端部に設置された反射面39Y1,39Y2上に位置する2つのZヘッドZsR,ZsLを用いて、テーブルWTBの高さと傾斜を計測する。テーブルWTBのXY位置に従って、使用するZヘッドをZsR,ZsLからZsR’,ZsL(あるいはZsR,ZsL’)に切り換える。制御装置は、切り換えの際、座標つなぎ法を適用して、新たに使用するZヘッドZsR’(あるいはZsL’)の初期値を設定する。これにより、テーブルのXY位置に応じて使用するZヘッドが逐次切り換えられるにもかかわらず、切り換えの前後でテーブルの高さと傾斜の計測結果が保存され、テーブルを高精度で駆動することが可能になる。
(もっと読む)
干渉計方式により間隔測定するための機構
【課題】十分に平行に配設された二つのプレート間で、高精度で干渉計方式により間隔測定するための機構を提供する。
【解決手段】光源3.1から発せられた光束が、第一プレート1にある分光器要素1.2に傾斜して当たり、そこで反射される参照光束と透過する測定光束に分割される。測定光束は第二プレート2にあるリフレクタ要素2.2に当たり、そこで第一逆反射を受ける。参照光束は第一屈折要素3.2aを、測定光束は第二屈折要素3.2bを通過し、二つの光束は引き続いて、それぞれ関連配置された逆反射器3.3を通過して、測定光束は第三屈折要素3.2cを、参照光束は第四屈折要素3.2dを通過する。そして参照光束は第一プレート1で反射を、測定光束は第二プレート2のリフレクタ要素2.2で第二逆反射を受け、それにより二つの光束が、共直線で検知ユニット3の方向に伝播し、そこで位相がずれた複数の走査検知信号を生成することができる。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、並びに計測方法
【課題】計測対象面の凹凸に起因する面位置センサの計測誤差の補正データを作成し、該補正データを用いて計測精度が改善される面位置センサを用いて、移動体を高精度に2次元駆動する。
【解決手段】 X干渉計127、Y干渉計16を用いて位置を監視しながらウエハステージWSTを移動させ、センサ72a〜72dを用いてウエハステージ上面に設けられたYスケール39Y1,39Y2のZ位置を計測する。ここで、例えば、2つの面位置センサ72a,72bの計測結果の差より、Yスケール39Y2のY軸方向の傾きが得られる。Yスケール39Y1,39Y2の全面について傾きを計測することにより、それらの2次元凹凸データが作成される。この凹凸データを用いてセンサの計測結果を補正し、該補正済みの計測結果を用いることにより、高精度にウエハステージを2次元駆動することが可能になる。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、計測方法、並びに位置計測システム
【課題】面位置センサの設置位置を計測し、該計測された設置位置に基づいて面位置センサを用いて移動体の2次元移動面の垂直方向と傾斜方向の位置座標を計測することにより、移動体を安定かつ高精度に駆動する。
【解決手段】 干渉計システムを用いてウエハステージWSTのXY位置を監視しながらウエハステージを移動させて、面位置センサ72k,74i,76jを用いてYスケール39Y3,39Y4を、X軸方向及びY軸方向に走査することにより、面位置センサのXY設置位置を計測する。得られた設置位置情報に基づいて、面位置センサを用いて、ウエハステージのXY平面(移動面)に対する垂直方向と傾斜方向の位置座標を計測することにより、ウエハステージを安定かつ高精度に駆動する。
(もっと読む)
光学式検査装置、検査システムおよび座標管理用ウエハ
【課題】欠陥座標に含まれている誤差を低減可能な光学式検査装置を提供する。
【解決手段】チャンネルが配列されたラインセンサと、ウエハをステージに載せてラインセンサに対して移動させる移動手段と、行列の行毎に1つ且つ列毎に1つ擬似欠陥ダイが形成され擬似欠陥ダイには複数の擬似欠陥が列方向に一列に形成されている座標管理用ウエハを検査したのを受けてチャンネル上に結像した擬似欠陥のステージ上の位置を擬似欠陥ステージ座標Xs0として検出するステージ位置検出手段と、擬似欠陥ステージ座標Xs0を擬似欠陥ダイ座標に変換する座標変換手段と、設計座標に対する擬似欠陥ダイ座標の差分ΔXを算出する差分算出手段と、擬似欠陥ステージ座標Xs0に対して差分ΔXが一定の振幅A1で振動し直線L1に沿って増加又は減少する座標誤差特性パターンCP1を取得する特性パターン取得手段とを有する。
(もっと読む)
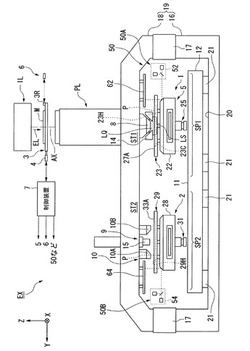
露光装置及び露光方法、並びにデバイス製造方法
【課題】従来の干渉計に比べて高精度な移動体の位置情報の計測を可能にする。
【解決手段】露光装置は、基板を保持して、XY平面内で移動し、XY平面に交差する反射面134を有するステージWSTと、計測装置20Y’とを備えている。計測装置は、ステージWSTの上方に配置され反射面134を介して入射した光ビームを回折させて反射面134に戻す固定スケール135と、反射面134に戻された光ビームを検出する検出部(124A、124B、126、28)と、を有する。計測装置は、固定スケール135からの戻りビームを、再度反射面134を経由させることで得られる前記光ビームの複数の回折ビームの干渉光を前記検出部で検出することで、ステージWSTのY軸方向の位置を計測する。
(もっと読む)
検出装置、移動体装置、パターン形成装置及びパターン形成方法、露光装置、及びデバイス製造方法
【課題】高精度なウエハステージの移動制御を行う。
【解決手段】ウエハステージの位置を計測するために用いられるスケール39Y2に対して検出装置PDY1の照射系69Aからの検出ビームを照射し、スケール39Y2を介した検出ビームを受光系69Bで検出することにより、スケールの表面状態(異物の存在状態)を検出する。これにより、スケールに対して非接触で表面状態の検出を行うことができる。さらに、この表面状態を考慮することで、ウエハステージの移動制御を高精度に行うことができる。
(もっと読む)
長尺材の測長方法及び装置
【課題】エンコーダの機械的不具合による測長異常をその場で検出し、大量の長さ不適合の発生を防止する。
【解決手段】透光する目盛2を付した定規1をラックレール12沿いに架設し、且つ定規1の目盛位置を測定する目盛位置測定器3を鋼管20長さ方向の一端側と他端側の各台車22に搭載しておき、一端側と他端側とでそれぞれ、台車22の移動の間、目盛位置測定器3による測定値とエンコーダによる測定値とを逐次比較し、両者の差が閾値超となったことを測長異常と同定する。
(もっと読む)
受光装置
【課題】ラインイメージセンサーと同等の機能を有する比較的安価な受光装置を提供する。
【解決手段】検出領域における光を検出するための受光装置であって、ホトデテクターと、ホトデテクターに入光する光を規制する開孔を有するマスクを備えた受光手段と、受光手段を検出領域に渡り移送せしめる移動手段と、受光手段の移動位置を検出する位置検出手段とを具備している。
(もっと読む)
3次元計測装置
【課題】反射率の低い被計測物であっても輪郭を正確に計測することができる3次元計測装置を提供する。
【解決手段】
所定の波長領域を有する光を照射し被測定物で反射した反射光と基準反射光との干渉光の各波長の光強度を検出して分光干渉波形を求め、分光干渉波形と理論上の波形関数に基づいて波形解析を実行する制御手段を具備する3次元計測装置であって、被計測面が対物レンズの集光点位置と一致するように予め波形解析後の光強度のピーク位置と共焦点位置の対応をとっておき、制御手段はイメージセンサーからの検出信号に基づいて分光干渉波形を求め、分光干渉波形と理論上の波形関数に基づいて波形解析を実行し、対物レンズの集光点位置に対応する光強度を位置付け手段によって特定されたX、Y座標におけるZ座標の光強度としてメモリに保存し、該メモリに保存されたX、Y、Z座標に基づいて3次元画像を形成する。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
マーク検出方法及び装置、並びに露光方法及び装置
【課題】物体に設けられた複数のマークをより短時間に高精度に検出する。
【解決手段】ウエハマークの位置を検出するマーク検出方法であって、複数のアライメント系AL1,AL21〜AL24の検出領域に対してウエハWを移動中に、アライメント系AL1,AL21〜AL24とウエハWの表面とのデフォーカス量を計測し、この計測結果に基づいてウエハWの面位置及び傾斜角の少なくとも一方を制御し、ウエハマークWMC1,WMA1,WMD1がアライメント系AL22,AL1,AL23の検出領域内に達したときに、ウエハWを静止させて、アライメント系AL22,AL23で対応するウエハマークWMC1,WMD1の位置を検出する。
(もっと読む)
計測方法、ステージ装置、及び露光装置
【課題】周囲の気体の屈折率変動の影響を低減させて、ステージの位置決め精度等を向上できる露光装置である。
【解決手段】投影光学系(PL)を介してウエハステージ(WST)上のウエハ(W)に露光用の照明光を照射して、ウエハ(W)に所定のパターンを形成する露光装置であって、ウエハステージ(WST)に設けられたスケールと、このスケールの位置情報を検出する複数のXヘッド(66)と、複数のXヘッド(66)を一体的に支持し、線膨張率がウエハステージ(WST)の本体部よりも小さい計測フレーム(21)と、複数のXヘッド(64)の検出結果からウエハステージ(WST)の変位情報を求める制御装置とを備える。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 ウエハWを保持し所定面内で移動するウエハステージWSTと、所定面内と実質的に平行に配置される移動スケール44A〜44Dに、複数のヘッド48a〜48kを介してそれぞれ所定平面と交差する方向からビームを照射して、ウエハステージWSTの位置情報を計測するエンコーダシステムと、エンコーダシステムの計測情報に基づいてウエハステージWSTを制御する制御システムによって、複数のヘッド48a〜48kのうち移動スケール44A〜44Dと対向する複数のヘッド48a〜48kの数が変化するとともに、ウエハステージWSTの移動によって、複数のヘッド48a〜48kのうち位置情報の計測に用いられるヘッドが別のヘッドに切り換わる。
(もっと読む)
画像測定装置
【課題】高精度なオートフォーカス処理が可能な画像測定装置を安価に提供する。
【解決手段】画像測定装置は、ワークを撮像するローリングシャッター式の撮像装置と、撮像装置の合焦位置を制御して合焦位置を合焦軸方向の位置情報として出力する位置制御システムと、撮像装置から取得した画像情報から画像情報のコントラスト情報を算出する演算処理装置とを備え、演算処理装置は、取得した画像を複数の領域に分割し、各領域の、画像内における位置とコントラスト情報とに基づいて画像情報のコントラスト情報を補正する。
(もっと読む)
画像測定装置、オートフォーカス制御方法及びオートフォーカス制御プログラム
【課題】高精度且つ高速なコントラスト式のオートフォーカスを実現する。
【解決手段】画像測定装置は、ワークを撮像してその画像情報を転送するカメラと、カメラの合焦位置を制御してこの合焦位置をZ軸方向の位置情報として出力する位置制御部と、画像情報及び位置情報に基づいてワークの画像測定を行う画像測定機とを備える。位置制御部は、カメラによるワークの撮像期間における所定のタイミングで、カメラ及び位置制御部のいずれか一方から他方に出力されるトリガ信号に基づき位置情報を取得保持し、画像測定機は、カメラから転送された画像情報及び位置制御部から出力された位置情報に基づき画像情報のZ軸方向の位置情報を算出し、算出された位置情報を用いてオートフォーカス制御を行う。
(もっと読む)
移動体駆動方法
【課題】露光装置で、複数のヘッドを含むエンコーダシステムを用いてウエハステージの位置を管理することが出来る移動体駆動方法を提供する。
【解決手段】制御装置により、エンコーダシステムのXエンコーダとYエンコーダとを少なくとも各1つ含む3つのエンコーダEnc1,Enc2及びEnc3を用いてステージWSTの移動面内の位置情報が計測され、該位置情報の計測結果と該位置情報の計測に用いられたヘッド(エンコーダ)Enc1,Enc2及びEnc3の移動面内での位置情報(p1,q1)、(p2,q2)及び(p3,q3)とに基づいて、XY面内でステージWSTが駆動される。これにより、複数のヘッドを含むエンコーダシステムを用いてステージWSTの移動中に制御に用いるヘッド(エンコーダ)を切り換えながら、ステージの移動を精度良く制御することが可能になる。
(もっと読む)
画像測定装置、オートフォーカス制御方法及びオートフォーカス制御プログラム
【課題】安価に測定誤差を校正し高精度且つ高速なコントラスト式のオートフォーカスを実現する。
【解決手段】画像測定装置は、ワークを撮像してその画像情報を転送するカメラと、カメラの合焦位置を制御してこれをZ軸方向の位置情報として出力する位置制御部と、画像及び位置情報に基づいてワークの画像測定を行う画像測定機とを備える。位置制御部は、カメラの所定の撮像タイミングで位置情報を取得保持し、画像測定機は、合焦軸方向に沿って移動速度及び移動方向の少なくとも一つが異なるように複数回のAFサーチを行い、各AFサーチのカメラからの画像情報及び位置制御部からの位置情報に基づき撮像タイミングと位置情報の取得タイミングとのずれ量を求め、このずれ量に基づいてAFサーチで求められた合焦位置を補正する。
(もっと読む)
1 - 20 / 162
[ Back to top ]