
Fターム[2F065FF28]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 測定点を捜すもの (476) | 自動追尾 (81)
Fターム[2F065FF28]に分類される特許
61 - 80 / 81
表面欠陥検査装置
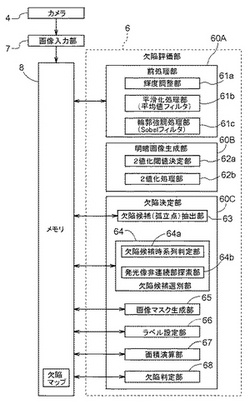
【課題】被検査面に存在する欠陥に対して照射光の回り込みを四方八方から生じさせるような照明を用いながらも欠陥の誤検出が抑制された表面検査技術を提供する。
【解決手段】複数の発光素子から構成された照明部による照射光によって照明された被検査面に対する撮像カメラ4の出力信号を評価して被検査面における欠陥を検知する欠陥評価手段6とからなる表面欠陥検査装置。欠陥評価手段が、出力信号から生成された画像データに対して輪郭強調処理を施した後平滑化処理を施す欠陥強調処理を少なくとも1回行う前処理部60Aと、この前処理部から出力された画像データから被検査面の明暗画像を生成する明暗画像生成部60Bと、この明暗画像生成部から出力された明暗画像から欠陥を検出する欠陥決定部60Cを備えている。
(もっと読む)
光検出装置

【課題】 光ビームの偏向制御が可能な2軸光偏向手段を有する光検出装置であって、サーボ動作中に光ビームの入射が遮断されたときに行う再サーチ動作において、2軸光偏向手段における偏向周波数を高くすることなく、確実、迅速な再サーチ動作を実現する。
【解決手段】 DSP3により、互いに周波数の異なる2つの周期信号を発生し、2軸偏向ミラー1における各軸方向についての偏向動作を独立的に制御し、この2軸偏向ミラー1を経た光ビームの二次元PSD素子2における入射位置の軌跡をリサージュ図形とし、2軸偏向ミラー1に光ビームを入射させる発光素子の方向を検出するとともに、光ビームの入射が遮断されたときには、制御信号の振幅を制限し、この制御信号に光ビームの入射が遮断される直前に検出されていた光ビームの入射方向に相当する直流成分を重畳して、サーチ動作が可能な領域の一部について再サーチ動作を行う。
(もっと読む)
画像撮影装置
【課題】追従撮影に置いて視標に対する誤認が少なく、中心部分の解像度を高くすることも可能で且つ追従性も高い画像撮影装置を提供する。
【解決手段】視標30を追従撮影する画像撮影装置は、2つのカメラユニット1とカメラユニットを所定の向きに制御可能なアクチュエータ2と制御装置3とからなる。カメラユニットは、少なくとも1つの画角を有するカメラ部10を有し、該カメラ部は撮像領域が物理的、電気的又は処理的に分割された少なくとも2つの分割領域を画定可能な撮像素子12を有する。制御装置3は、各カメラユニットにおけるカメラ部の撮像素子のどの分割領域で視標が撮影されるかに応じて、各カメラユニットが所定の動作、例えば衝動性眼球運動に対応する動作、又は滑動性眼球運動に対応する動作を行なうようにアクチュエータを制御する。
(もっと読む)
移動体に搭載される目標位置計測装置
【課題】市街地の建物密集場所においても車両走行中に自動的、高精度、迅速に目標位置を計測できる安価な目標位置計測装置を提供する。
【解決手段】第1の撮像手段である基準点捕捉カメラ19の撮像視野内に基準点P11が捕らえ続けられるように、第1の指向手段の基準点捕捉カメラ旋回駆動部20Bが、制御手段のコントローラ40によって制御される。一方で、第2の撮像手段の標定用可視光カメラ11あるいは捜索、標定用IRカメラ12の撮像視野内に目標点P2が捕らえられたときに測定された、第1の測定角度α、第2の測定角度β、測定距離L、測定位置P0と、基準点P11の位置情報とに基づいて、目標点P2の位置が位置計測手段のコントローラ40によって計測される。
(もっと読む)
物体のモニタリング方法およびこれを用いたモーショントラッカ
【課題】 識別情報を有していないマーカーが取り付けられた物体の動き(位置、角度)をモニタリングする方法を提供する。
【解決手段】 物体をステレオ視する一対のカメラ12、14を設置し、4つ以上の点灯可能なマーカー群18を取り付け、物体固定座標系上での各マーカーの座標を定め、3つのマーカーを結んだ三角形が正三角形を形成しない位置関係となる3つのマーカーを探索用マーカーとして点灯し、幾何学的な予測に基づいて、画像間で対となる探索用マーカー像どうしの対応付けを行い、3つの探索用マーカーについて絶対座標を算出し、探索用マーカー間の距離を算出し、3つの探索用マーカーがマーカー群18のうちのいずれであるかを特定するマーカー識別を行い、探索用マーカーの絶対座標と物体固定座標系上での座標とに基づいて、物体の位置と角度を特定する。
(もっと読む)
監視を行なう方法及びシステム
移動物体を検出し、監視システムを制御する方法は、少なくとも1つの像形成センサ(104)からの像情報を受け取るように適応された処理モジュール(1016)を含む。前記システムは、捕獲された像に対して動き検出分析を実行すると共に、移動物体が検出されると、特定のやり方で、カメラ(104)を制御する。像処理は、監視エリアに対するカメラの物理的方向を使用して、カメラにより捕獲された像を、監視エリアの基準マップへとマッピングするのを容易にする。カメラの方向を使用すると、シーン内の移動物体の位置(例えば、緯度、経度及び高度)を導出することができる。  (もっと読む)
(もっと読む)
平坦度等の測定装置および平坦度等の測定方法
【課題】 高精度に測定対象物の平坦度の変化を測定することができる平坦度等の測定装置および平坦度等の測定方法を提供することを目的としている。
【解決手段】 定規3で画像上にある基準線24(図では500μm)を計る。この例では112ピクセルとなっている。定規23を計りたいピンの測定部位(先端)25cに持って行く。対称の画像のピン間を計る。この例では36ピクセルとなっている。先の500μmが112ピクセルであるから、比例計算を行う。このとき、対称となっているので1/2にする。500μm×36/112/2≒80μmとなる。基準面から80μm浮いた状態(平坦度)である。250℃近くの画像から同様に測定する。この例では63ピクセルとなっている。500μm×63/112/2≒141μmとなる。
(もっと読む)
表面検査装置
【課題】 金属板の表面全体において鮮明な撮像画像を得ることが可能な表面検査装置を提供する。
【解決手段】 撮像手段2の撮像方向を変更し、その変更量を示す撮像方向変更量信号S1を撮像方向変更手段4及び演算手段14へ送信するコントローラ12と、撮像方向変更量信号S1に基づいて撮像手段2の撮像方向を変更する撮像方向変更手段4と、撮像方向変更量信号S1に基づいて、光源6による光の照射方向が撮像手段2の撮像方向に対する正反射方向となる光源6の位置及び光の照射方向の変更量を演算し、光源位置変更量信号S2を駆動部18へ送信するとともに照射方向変更量信号S3を照射方向変更手段10へ送信する演算手段14と、光源位置変更量信号S2に基づいて光源6の位置を変更する駆動部18と、照射方向変更量信号S3に基づいて光源6による光の照射方向を変更する照射方向変更手段10とを備える。
(もっと読む)
画像測定装置
【課題】 エッジ検出の誤りを少なくできると共にエッジ検出のやり直しの手間を少なくできる画像測定装置を提供する。
【解決手段】 エッジを自動的に追跡してそのエッジを検出する、いわゆるオートトレース用のツール85を用いる画像測定装置である。オペレータはスタート点99を指示した後、中継点103を指示する。ツール85によりスタート点99から中継点103までの区間のエッジEが追跡され、その区間のエッジEが検出される。以後、中継点が指示される毎にその中継点により定められた区間のエッジEをツール85で追跡し、その区間のエッジEが検出される。
(もっと読む)
人間追跡装置及び方法、その方法を行うためのプログラムが記録された記録媒体とその装置を備えた移動型電子機器
【課題】人間の上体と足とを対象に人間を追跡すること。
【解決手段】人間追跡装置Hは、人間の少なくとも1つの上体位置情報を検出する上体位置情報検出モジュール100と、人間の少なくとも1つの足位置情報を検出する足位置情報検出モジュール110と、少なくとも1つの上体位置情報と少なくとも1つの足位置情報とを基に、追跡対象を選択する追跡対象選択モジュール130と、追跡対象選択モジュール130で選択された追跡対象を追跡するための移動型電子機器の追跡速度及び方向を計算する追跡速度及び方向計算部150と、移動型電子機器を駆動するモータ170と、追跡速度及び方向計算部150で計算された結果を基に移動型電子機器を駆動するためのモータを制御するモータ制御部160とを備える。
(もっと読む)
位置検出装置、位置検出方法及び位置検出プログラム
【課題】 一の撮影手段を用いて簡略な検出処理により、人間のように様々な高さを有する物体の2次元位置を検出することができる位置検出装置を提供する。
【解決手段】 ビデオカメラ11は、人間を撮影して2次元画像を取得し、投影部12は、取得された2次元画像から人物領域を抽出して3次元空間中の複数の水平面上に投影し、積分部13は、各水平面上に投影された人物の写像を積分して積分値を算出し、検出部14は、算出された積分値のピークが位置する3次元空間中の水平位置を人間の位置として検出するとともに、このピークが位置する3次元空間中の水平位置に人間の写像が存在する最も高い水平面の高さを人間の高さとして検出する。
(もっと読む)
レーザー光利用接近検知システム
【課題】 クレーン等の重機が送電線に対して接近したことを検知する新規なレーザー光利用接近検知システムを提供すること
【解決手段】 クレーンの移動するブームの先端部に配置され、送電線の相対的な動きに追従するCCDカメラと、前記CCDカメラに連動して照射方向を変更するレーザー距離計と、前記レーザー距離計に適当なインターフェイスによって接続されたコンピュータとを備え、前記レーザー距離計は、前記送電線までの距離を測定する。
(もっと読む)
移動ロボットの動き追跡装置及びその動き追跡方法
【課題】 特定物体の動きを追跡するために画素を比較する演算量を画期的に減少させることができると共に、前記特定物体の四方に対する動きを効率的に感知し得る移動ロボットの動き追跡装置及びその方法を提供することにある。
【解決手段】 移動ロボットの動き追跡装置は、 特定物体を撮影するカメラと、前記カメラによって撮影された特定物体の現在映像に基準領域を設定し、且つ前記基準領域が設定された現在映像を生成する動き追跡映像生成部と、前記現在映像の基準領域の枠の画素と以前映像の基準領域の枠の画素の差映像を抽出する差映像抽出部と、前記抽出された差映像に基づいて、前記特定物体の動きを追跡するマイクロコンピュータと、から構成される。
(もっと読む)
移動再帰反射器を測定する絶対距離計
増分干渉計を使用することなく、移動外部再帰反射器またはそのほかの移動目標表面の1またはそれを超える次元の絶対距離測定および/または表面走査および/または座標測定が可能なレーザ・デバイスおよび方法。  (もっと読む)
(もっと読む)
多次元計測システム
レーザを利用したトラッキングユニットは、ターゲットと通信してターゲットに関する位置情報を取得する。具体的には、ターゲットを計測対象点に配置する。次に、ターゲットのピッチ移動、ヨー移動およびロール移動、ならびにトラッキングユニットを基準としたターゲットの球座標を取得する。例えば、ターゲットは、遠隔制御ロボットなどの可動装置に組み込まれた能動素子であってもよい。 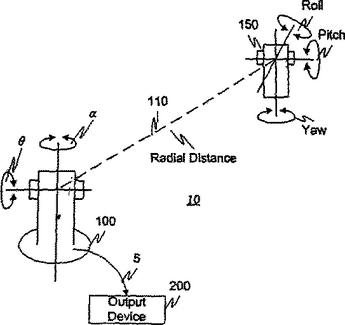 (もっと読む)
(もっと読む)
移動体高さ判別装置
【課題】 単一の撮像手段を用いて移動体の高さを簡易かつ良好に判別できる移動体高さ判別装置を実現する。
【解決手段】 1台のカメラ1による2次元画像Gにおいて、高さ演算部24が次の処理を行う。代表点P1,P2の一方を標準高さを持つ標準点Aとみなし、他方を仮の高さを持つ仮定点Bとみなす。移動体M1の鉛直軸線Tに沿って標準点Aを仮の高さ相当の比較点aに補正する。複数クロック以上の期間の比較点aと仮定点Bとの実空間での2点間距離dの変動量qを求める。仮定点Bの高さ設定値を3つ以上設定し各々の高さ設定値ごとに上記変動量qを求める。2個の代表点P1,P2につき、標準点Aと仮定点Bの関係を逆にして上記変動量qを求める。そのうち変動量qが最も少なく且つ標準点の移動量に対する割合が一定値以内に収まっていたとき、その高さ設定値の仮定高さが標準点Aの移動体M1に対する仮定点Bの移動体M2の相対高さとして得る。
(もっと読む)
遠隔介護支援システム
【課題】 全身麻痺や失語症の患者、その他障害者や介護者の負担を軽減し、より円滑なケアとコミュニケーションが可能な遠隔介護支援システムを提供する。
【解決手段】 動画撮像可能なカメラ16と、カメラ16により撮像した画像を処理するクライアントコンピュータ18とを有する。クライアントコンピュータ18は、被介護者の目44の位置を検出する目位置認識手段を有し、被介護者が操作する操作用アイコン及び介護者からの返答の表示部を有した被介護者側ディスプレイ14と、クライアントコンピュータ18に接続された赤外線リモコン22とに接続されて、被介護者用入力システム4を構成する。介護者側ディスプレイ30と、被介護者からの連絡事項に対する返答を行うサーバコンピュータ28により、介護者用確認システム6を構成する。被介護者用入力システム4と介護者用確認システム6は、通信ネットワークで接続される。
(もっと読む)
観察システムおよび観察方法
【課題】繁雑な手作業を行うことなく、かつ、正確な観察を行うことを可能にし、しかも、短い単位時間あたりの観察を実現することができる観察システムを提供する。
【解決手段】観察を行う対象である観察対象物の表面にドットを形成するドット形成手段と、上記ドット形成手段によって上記観察対象物の表面に形成されたドットを観察する観察手段とを有する。また、上記ドット形成手段は、上記観察対象物の表面に所定の粘度を有する液体の飛滴を吐出する塗布手段と、上記塗布手段と上記観察対象物との相対的な位置関係を変更し所定の位置で位置決めする位置決め手段と、上記塗布手段と上記位置決め手段とを制御して、上記観察対象物の表面にドットを形成させる第1の制御手段とを有する。
(もっと読む)
画像処理装置及びロボット装置ならびに車両誘導装置
【課題】
画像処理装置において、広い範囲にある対象物に対して、屋外や強い照明下においても安定して形状復元する。
【解決手段】
画像処理装置において、画像入力手段1aが時系列的に入力した画像上の特徴的な点の位置関係の変化を第1の計算手段1bが抽出する。位置関係の変化から特徴的な点の三次元位置と画像を捉えた際の視点の位置と方向を第2の計算手段1cが計算する。入力した画像と特徴的な点の三次元位置とから画像に捉えられている物体の三次元形状データを第3の計算手段が計算する。
(もっと読む)
自己補償レーザトラッカ
例えばレーザに基づく座標測定装置、レーザトラッカ、又はその他の座標測定装置であり得る座標測定装置を補償する装置及び方法が提供される。一つの例示的な方法では、そのような補償は、埋め込まれたトラッカターゲットによるペイロードパラメータの自己補償を包含する。別の例示的な実施形態では、そのような補償は、埋め込まれた温度センサによるペイロード、アジマスポスト、軸、又はR0パラメータの自己補償を包含する。 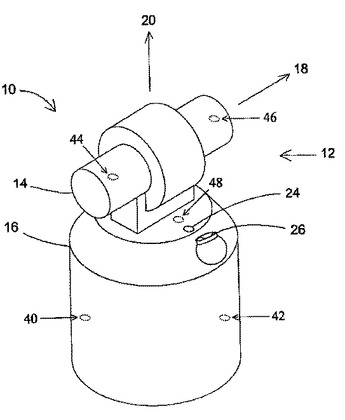 (もっと読む)
(もっと読む)
61 - 80 / 81
[ Back to top ]