
Fターム[2F065FF28]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 測定点を捜すもの (476) | 自動追尾 (81)
Fターム[2F065FF28]に分類される特許
21 - 40 / 81
物体の水平度を求める方法
【課題】物体の水平度を測定する専用の計器を用いることなく、前記物体の水平度を求める際に前記物体に取り付けるターゲットの数を少なくすることにより、前記物体への前記ターゲットの取付けに要する手間や費用を低減すること。
【解決手段】物体の水平度を求める方法は、ターゲットを有する台を前記物体に回転可能に取り付けること、前記台を回転させつつ、前記ターゲットが第1の位置にあるときにおける前記ターゲットの第1の三次元座標と、前記ターゲットが第2の位置にあるときにおける前記ターゲットの第2の三次元座標と、前記ターゲットが第3の位置にあるときにおける前記ターゲットの第3の三次元座標とを測定すること、前記第1の三次元座標、前記第2の三次元座標及び前記第3の三次元座標から、水平面に対する、前記第1の位置と前記第2の位置と前記第3の位置とを含む平面の傾きを算出することを含む。
(もっと読む)
モーションキャプチャにモデルトラッキングを適用するための方法及びシステム

シーンの立体画像などの画像が、装置によって受信され得、観察され得、又はキャプチャされ得、ユーザーのモデルが画像内に生成され得る。その後、モデルは、ユーザーによる1つ以上の動作を模倣するように調整され得る。例えば、モデルは、物理空間におけるユーザーの動作に相当するポーズに調整され得る関節と骨を有する骨格モデルであり得る。ユーザーの動作に関するモーションキャプチャファイルが、調整されたモデルに基づいて、リアルタイムに生成され得る。例えば、調整されたモデルのポーズそれぞれに関する関節と骨を定義しているベクトル集合が、キャプチャされ得、モーションキャプチャファイルにレンダリングされ得る。 (もっと読む)
目標追跡装置及び目標追跡方法
【課題】移動する目標物を高精度に追跡できるようにする。
【解決手段】目標物に向けて光を照射するレーザ発生器12と、レーザ発生器12から照射された光による目標物からの反射光を撮像面に結像させることにより目標物を撮像する撮像器11とを備える目標追跡装置において、制御部14は、撮像器11により撮像された画像上での像の慣性主軸を求め、慣性主軸に沿った画素値の分布に基づいて目標物の位置を算出し、算出された位置をもとにレーザ発生器12及び撮像器11の指向方向を駆動部13により制御する。
(もっと読む)
測定システムおよび干渉計
【課題】産業機械と干渉計とが衝突してしまうことを防止できる測定システムを提供すること。
【解決手段】移動体21と干渉計3とが接近しすぎるなど、移動体21に取り付けられた反射体41に対する測定においてなんらかの異常があった場合、干渉計3の判定手段7が受光信号に基づいて、反射体41に対する測定において異常があると判定し、干渉計3の停止命令出力手段52が産業機械2に停止命令を出力する。そして、停止命令が入力された産業機械2の停止手段231が移動機構22の駆動を停止させ、移動体21の移動を停止させる。従って、移動体21と干渉計3とが接近しすぎるなど、移動体21の測定においてなんらかの異常があった場合、産業機械2の停止手段231が移動機構22の駆動を停止させることとなるので、産業機械2と干渉計3とが衝突してしまうことを防止することができる。
(もっと読む)
追尾式レーザ干渉計
【課題】再帰反射体を見失ってしまっても測定を再開できる追尾式レーザ干渉計を提供すること。
【解決手段】第1判定部521により第1,第2受光手段のうち少なくとも一方の受光手段の受光量が所定の第1閾値以下と判定された場合、パターン射出制御部54が、光源からの光が所定のパターンに沿って射出されるように変更機構121を制御する。そして、パターン射出制御部54により変更機構121が制御され、光源からの光が所定のパターンに沿って射出されている間に、第2判定部522により各受光手段の受光量が共に所定の第2閾値以上と判定された場合、追尾制御部51が変更機構121に再帰反射体11を追尾させる。従って、干渉計1は、再帰反射体11を見失った場合、所定のパターンに沿って光を射出して再帰反射体11を探索し、再帰反射体11を検出した場合には再び再帰反射体11を追尾でき、測定を再開できる。
(もっと読む)
液滴の観測方法および観測装置
【課題】ノズルから吐出された液滴を、より実機に近い状態で観測できる観測システムを提供する。
【解決手段】ノズルから吐出された液滴3の画像をインターバルTiをおいて断続的に取得する取得部23と、時間的に前後に得られた第1の画像φ31と第2の画像φ32の間で、それらに含まれる液滴3の同一性を判断する認識部24とを有する測定ユニット10を提供する。画像毎に含まれている液滴3の同一性を判断することにより、速度の測定の最初の画像に含まれた液滴と、最後の画像に含まれた液滴とが同一であることを保証できるので、飛翔方向が予測できないような液滴でも自動的に観察でき、速度や飛翔方向を測定できる。
(もっと読む)
三次元形状復元装置
【課題】三次元形状復元装置において、観測データ行列(特徴点位置系列)中に複数の物体に由来するデータが混在していても因子分解の実行を可能とする。
【解決手段】複数の物体に由来する特徴点の位置を表す観測データ行列xを因子分解するにあたり、物体の形状を表す形状行列をz、特徴点のそれぞれが属する物体を指定する指定行列をhとし、また、物体uの運動行列We|u ,物体uに由来する特徴点の測定の正確さτ|u,特徴点がそれぞれの物体u(u=1,2,…,U)に属している確率(混合比)gをまとめたものをモデルパラメータをθとして、変分ベイズ推定法を適用し、Eステップでは、第1試験分布q(θ)を固定して第2試験分布q(z,h)を求め、Mステップでは、第2試験分布q(z,h)を固定して第1試験分布q(θ)を求めることで、確率的に因子分解計算を実行する。
(もっと読む)
衣料と併用するための印形
【課題】トラッキングマークが表示された衣料品を着用している人の数を数える方法を提供する。
【解決手段】この方法は、視界内の人によって着用された衣料品に表示されたトラッキングマークを写すためのカメラと、カメラからの画像を受信し、画像中のトラッキングマークを識別するためのトラッキングマーク認識モジュールと、このトラッキングマーク認識モジュールによって認識されたトラッキングマークに基づいてコンピュータ機能を実行するためのプロセッサとを含むコンピュータ制御の認識デバイスを準備し、トラッキングマーク認識モジュールを用いて、カメラから与えられる画像から、衣料品に表示されたトラッキングマークを認識することを含む。コンピュータ機能は、トラッキングマーク認識モジュールによって認識されたトラッキングマークの数を数えることである。
(もっと読む)
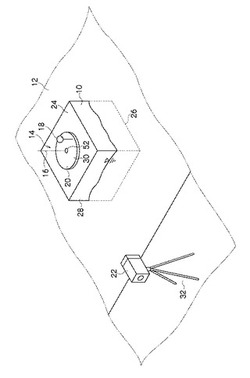
ビデオカメラを制御して可動なターゲットオブジェクトを追跡する方法とシステム
計器座標系を有するビデオカメラの照準点までの軸の方向を制御することにより、可動なターゲットオブジェクト上のポイントオブインタレスト(POI)を追跡して、当該移動しているターゲットオブジェクトを含む局所座標系におけるPOIの位置を計算するための方法が開示される。本方法は、照準点までの軸の回転角及び傾斜角と、照準点までの軸に実質的に沿った距離とを測定すること、並びに、計器座標系において決定された位置を局所座標系において決定された位置に変換するキャリブレーションマトリックスを計算することを含む。一つの計器と少なくとも一つのコンピュータとを含むシステムが開示され、このシステムでは、計器はビデオカメラと距離計とを含んでおり、ビデオカメラは、方向の調節が可能な照準点までの軸を含んでいる。一実施例では、ターゲットオブジェクトは航空機の表面上を移動して同表面を検査する。 (もっと読む)
顔の3次元モデル生成装置、顔の3次元モデル生成方法および顔の3次元モデル生成プログラム
【課題】眼鏡をかけている人物の顔の3次元モデルの生成時においても、裸眼の人物の顔の3次元モデル生成と同様に、一回の画像撮影と1つの画像列入力から、顔の3次元モデルの生成を可能にする。
【解決手段】複数枚のデジタル画像データを入力する画像入力部11と、前記入力画像内の眼鏡フレーム部分の画素値を除去する眼鏡除去部12と、前記入力画像列から裸眼の顔の3次元モデルを生成する裸眼の顔モデル生成部13と、前記入力画像列から眼鏡の3次元モデルを生成する眼鏡モデル生成部14と、前記裸眼の顔の3次元モデルと前記眼鏡の3次元モデルの相対3次元位置を計算する相対位置計算部15と、前記裸眼の顔の3次元モデルの座標系と前記眼鏡の3次元モデルの座標系を、前記相対3次元位置情報をもとに統合するモデル統合部16と、前記統合結果をデジタルデータとして出力する出力部17とを備える。
(もっと読む)
発光装置及び対象物の追尾方法
【課題】発光装置(対象物)の位置を追跡しつつ、データの読み取りも円滑に行うことが可能な技術、発光装置を提供する。
【解決手段】「色彩の変化の変化(変化の切り替え)」でデータを表す発光装置を提供する。最初の1次変化で、その物体の特定、位置の特定を行い、その後、いわば2次変化(1次変化の切り替え)でデータを表している。したがって、物体の位置の特定を行いつつ、自由にデータを表すことが可能となったものである。
(もっと読む)
物体形状認識システム及び物体形状認識方法
【課題】 容易に物体の形状を認識する。
【解決手段】 物体形状認識装置10は、形状の認識対象となる物体を撮像するカメラ11と、物体から発生した音を検出するマイク12及び音検出部13と、音が検出されたタイミングでカメラ11によって撮像された画像における、音が発生した位置を検出する位置検出部14と、検出された位置から物体の形状を推定する形状推定部16と、を備える。
(もっと読む)
センサの位置を決定するための方法及び装置
【課題】センサの空間位置を決定するための改善された方法及び改善された装置を提案する。
【解決手段】この装置及び方法は、センサの空間位置を決定するための方法及び装置であり、まず、センサの位置を大まかに検出することによって大まかな位置情報を決定し、次に、センサに搭載された少なくとも3つの反射器をレーザ追跡装置によって測定することによってセンサのより精確な位置を取得する。レーザ追跡装置のレーザが反射器を探索する探索領域は、大まかな位置情報を基準として制限される。
(もっと読む)
移動体追跡装置及びその方法
【課題】複雑な処理を行うことなく、精度良く移動体の追跡が行える移動体追跡装置を提供する。
【解決手段】既知の位置関係にある少なくとも2台の撮影手段1a、1bと、撮影された画像を一定の時間間隔で取り込み手段2を介して取り込む信号処理装置3とを有し、取り込まれた前記画像が保存される画像保存部4と、対応点を求める対応点計測手段5と、対応点が正確に求められているか否かを判定する対応点検出判定手段6と、対応点が検出された場合に画像中の移動体の3次元位置を計測する3次元位置計測手段7と、対応点が検出できない場合には次の画像入力を待ち、対応点が検出できなかった前後の時間の前記画像を用いて移動体が存在するかを確認し、存在する場合には前後の画像から3次元位置を推定する3次元位置推定手段8と、3次元位置計測手段又は3次元位置推定手段で求められた3次元位置より前記移動体の軌跡を求める移動体追跡手段9と、を備える。
(もっと読む)
使用者のジェスチャの検出結果に依存した、加工物の一回の測定の複数の結果の表示
本発明は、加工物の一回の測定の複数の結果の表示に関する。ジェスチャ検出装置(41a、41b)が、加工物の存在している一つの個体(9)のところで、または加工物の存在している一つの個体(9)の一つの画像(11)のところで、使用者の片手(47)または両手で行われる動きである、使用者のジェスチャを検出する。識別装置(45)が、前記ジェスチャを、ある一つの記号を表している、予め定義された一つのジェスチャとして識別する。選択装置(45)が、前記ジェスチャの識別結果に依存して一つの測定結果を選択する。引き続き前記測定結果を表示する、またはこれにマーキングを施すことができる。 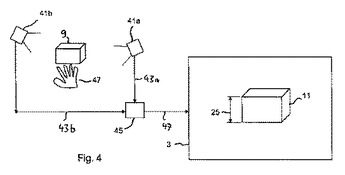 (もっと読む)
(もっと読む)
距離あるいは変位を検出する検出器およびこれを用いるレール変位量測定装置
【課題】
回動ミラーの歪みを改善することにより距離あるいは変位の検出精度を向上させることができる距離あるいは変位を検出する検出器を提供することにある。
【解決手段】
この発明は、対象物と光式センサとの間に回動ミラーを介在させて回動ミラーが回動することで変動する対象物の特定の測定点に投光し、その反射光を受光して測定点までの距離あるいは変位を検出する検出器において、前記の回動ミラーが、誘電体多層膜が設けられたガラス製基板の裏面側にチタン製基板あるいはチタン合金製基板を張り合わせたものである。
(もっと読む)
スポット特性測定における被検光学系位置調整方法および装置
【課題】スポット特性測定を行う際の被検光学系の位置調整を、自動化して高精度かつ短時間で行うことができるようにする。
【解決手段】測定装置に対する被検光学系の位置を順次移動させ、移動毎に光ビームの画像を撮像し、画像全体の輝度積分値と画像内の各領域別の輝度積分値を求める。求められた画像全体の輝度積分値が第1の閾値以上となるか否かを判定する第1判定処理と、求められた各領域別の輝度積分値の大小を比較し、最大の輝度積分値と最小の輝度積分値との差が第2の閾値以上となるか否かを判定する第2判定処理とを行い、判定結果に応じて、散乱光パターンに基づく第1の移動処理と輝度積分値に基づく第2の移動処理とを行う。
(もっと読む)
両眼の検出および追跡する方法、及び装置
少なくとも1つの顔の中の両眼の3D座標を検出し、その後追跡する方法において、少なくとも1つの画像センサの少なくとも1つのデジタルビデオ信号のシーケンスを含む画像データを受信するステップと、画像データにおいて眼を検出するか又はすでに検出されている眼を追跡するステップと、検出された眼又は追跡される眼の3D座標を確認するステップと、検出された眼又は追跡される眼を両眼と関連付けるステップと、両眼の3D座標を提供するステップとが提案される。前記画像データにおいて眼を検出することは、画像データにおいて1つ以上の顔を認識するステップと、少なくとも1つの認識された顔の3D座標を確認するステップと、認識された顔上に第1の探索域を確立するステップと、第1の探索域内で少なくとも一方の眼を検出するステップとを含む。前記画像データにおいて前に検出された眼を追跡することは、認識された顔上に第2の探索域を確立するステップと、第2の探索域内で両眼の眼を追跡するステップとを含む。 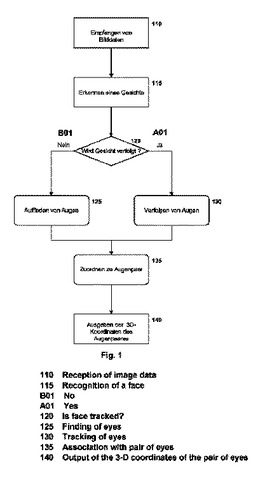 (もっと読む)
(もっと読む)
視標位置測定装置
【課題】視標が置かれる環境に影響を受けずに高精度に視標を追跡してその位置を測定することが可能な視標位置測定装置を提供する。
【解決手段】視標10の位置を測定するための視標位置測定装置は、視標センサ部12と視標情報出力部15と外部測定部20と演算部30とから構成される。視標センサ部12は、視標10に配置され視標10の位置を計測するものである。視標情報出力部15は、視標センサ部12により計測される位置情報を出力するものである。外部測定部20は、視標10の位置を外部から計測するものであり、計測された情報は外部位置情報として出力する。そして、演算部30は、視標情報出力部15からの位置情報と外部測定部20からの外部位置情報とを用いて、視標10の位置を特定する。
(もっと読む)
非接触で対象表面の座標を測定する測定方法および測定システム
【課題】多数の基準マーキングを使用しないで、対象物体座標系における対象物体の対象表面を非接触で正確かつ迅速に座標測定することが可能な方法および装置を提供する。
【解決手段】対象物体座標系Oにおいて測定される対象物体1の対象表面2を非接触で座標測定するための測定方法および測定システムに関する。対象表面2の第1の区域S1の第1の3次元画像P1は、第1の位置x1, y1, z1と第1の方向ψ1,ω1,κ1で、電子的に測定され、その第1の3次元画像P1のデータは、深さの成分の情報を含む多数の第1の画素i1から構成される。3次元画像記録装置3の画像座標系Bにおける第1の3次元画像座標のデータは、第1の画素i1に割り当てられる。対象物体座標系Oにおける3次元画像記録装置の第1の位置x1, y1, z1と第1の方向ψ1,ω1,κ1は、 対象物体座標系Oに結合された測定装置4a,4bにより測定される。
(もっと読む)
21 - 40 / 81
[ Back to top ]