
Fターム[2F065FF42]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 反射、散乱光の分布 (3,485) | 分布の形 (781)
Fターム[2F065FF42]に分類される特許
201 - 220 / 781
形状測定装置
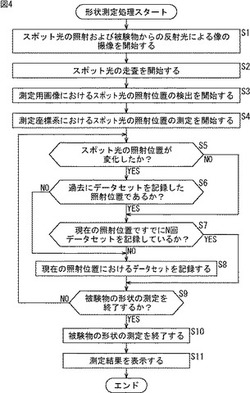
【課題】被検物の三次元形状を測定する際に必要なメモリの容量を効率的に削減する。
【解決手段】形状測定装置において、ステップS5において、スポット光の照射位置が変化したと判定され、ステップS6において、過去にデータセットを記録した照射位置でないと判定された場合、測定データ、中間データおよび測定用画像データを含むデータセットを記録する。また、スポット光の照射位置が変化したか否かに関わらず、ステップS7において、現在のスポット光の照射位置でまだN回データセットを記録していないと判定された場合、データセットを記録し、すでにN回データセットを記録していると判定された場合、データセットを記録しない。本発明は、例えば、三次元形状測定装置に適用できる。
(もっと読む)
光学式検出装置および電子機器

【課題】複雑な画像信号処理回路なしに簡単な構成で手などの人の動きを容易に検出できる小型で安価な光学式検出装置を提供する。
【解決手段】エリアセンサである発光素子2と、発光素子2から出射された光束を測定対象物20に照射する発光レンズ部4aと、測定対象物20からの反射光を集光する受光レンズ部5aと、受光レンズ部5aにより集光された測定対象物20からの反射光を検出する受光素子3と、受光素子3からの受光信号を処理する信号処理部7とを備える。上記信号処理部7は、受光素子3からの受光信号に基づいて、受光素子3上の光スポット位置または光スポット形状の少なくとも一方からxy座標平面上の測定対象物20のx座標またはy座標の少なくとも一方を検出する。
(もっと読む)
光学式位置検出装置、ハンド装置およびタッチパネル
【課題】対象物体が透光部材を押し込んだときの沈み込み深さを光学的に正確に検出することのできる光学式位置検出装置、並びに当該光学式位置装置を備えたハンド装置およびタッチパネルを提供すること。
【解決手段】光学式位置検出装置10では、光源装置11が透光部材40において対象物体Obが位置する第1面41側とは反対側の第2面42側から検出光L2を出射し、対象物体Obで反射して透光部材40の第2面42側に透過してきた反射光L3を光検出器30で検出する。透光部材40の第1面41は、弾性および対象物体Obに対する吸着性を備えている。このため、位置検出装置10では、対象物体Obと透光部材40とが接触した瞬間、および対象物体Obが透光部材40を押圧した際の沈み込み深さを正確に検出することができる。
(もっと読む)
ウェハ搬送検査機台及びウェハ搬送検査方法
【課題】ウェハ検査の精度を向上させること。
【解決手段】ウェハを載置して当該ウェハを搬送する第1搬送ユニットと、前記第1搬送ユニットに隣接し、前記第1搬送ユニットにより搬送されたウェハを受け取り、当該ウェハを載置して当該ウェハを搬送する第2搬送ユニットと、前記第2搬送ユニットの上のウェハを検査する検査ユニットと、前記検査ユニットに連結されて、前記検査ユニットを前記第2搬送ユニットの上で移動させる駆動装置と、を備え、前記第2搬送ユニットがウェハの搬送を一時的に停止したとき、前記駆動装置が前記検査ユニットを移動させつつ前記検査ユニットが前記第2搬送ユニットの上のウェハを検査する。
(もっと読む)
形状測定装置
【課題】測定者に被測定物体に対するプローブの位置やライン光の照射角度をアシスト(支援)することができる形状測定装置を提供する。
【解決手段】光学式センサにより被測定物体51の形状を測定して測定情報を出力するプローブ12と、複数のアーム部11a及びプローブ12を回転可能に接続する2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bに設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、表示部30と、測定情報及び角度情報から、被測定物体51の形状情報を算出するとともに、形状情報を表示部30に出力する制御部20と、を有する形状測定装置100において、制御部20は、プローブ12の操作を支援するアシスト表示を表示部30に表示するように構成される。
(もっと読む)
形状測定装置
【課題】測定者の操作に応じて関節部の回転動作を補助するように構成された形状測定装置を提供する。
【解決手段】形状測定装置100は、光学式センサ40により被測定物体51を非接触で走査して当該被測定物体51の形状の測定情報を出力するプローブ12と、アーム部11a及び2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bの各々に設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、関節部11bに設けられ、当該関節部11bにより接続された一方のアーム部11a若しくはプローブ12を他方のアーム部11aに対して回転駆動させる駆動部15と、角度情報からプローブ12の移動を検出して駆動部15を作動させる制御部20と、を有する。
(もっと読む)
形状測定装置
【課題】測定者の位置や姿勢に関わらず、常に、被測定物体の測定結果を目視で確認することができる形状測定装置を提供する。
【解決手段】被測定物体51の形状を測定して測定情報を出力するプローブ12と、アーム部11a及び2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部と、関節部11bに設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、表示部30と、測定情報及び角度情報から、被測定物体51の形状情報を算出するとともに、この形状情報を表示部30に出力する制御部20と、を有する形状測定装置100において、表示部30を、測定者の頭部に装着され、この測定者の少なくとも一方の眼前に形状情報を投影する投影部35を有するヘッドマウントディスプレイで構成する。
(もっと読む)
隙間段差計測装置、隙間段差計測方法、及びそのプログラム
【課題】計測対象の寸法を求める隙間段差計測装置において、計測姿勢を正確に正対する必要がなく、容易に高精度の計測を行う。
【解決手段】計測対象Gを形成する2つのワークW1,W2の表面にスリット光L1を照射するスリット光照射手段4と、少なくとも前記スリット光が照射された状態の前記計測対象を含む第一の平面画像、及び前記スリット光が照射されない状態で、前記計測対象を形成する一対のワーク端部を含む第二の平面画像を取得する撮像手段6と、前記計測対象の寸法を算出する制御手段10とを備え、前記制御手段は、前記第一の平面画像から、前記ワーク表面に照射されたスリット光の中心ラインLCを抽出し、前記第二の平面画像から前記一対のワーク端部のエッジラインをそれぞれ抽出し、前記スリット光の中心ラインと前記一対のワーク端部のエッジラインとの各交点P1,P2に基づき前記計測対象の寸法を算出する。
(もっと読む)
ハンド装置
【課題】比較的簡素な構成でワークとハンド部との相対位置を検出することにより、ワーク把持動作の高速化を実現することのできるハンド装置を提供すること。
【解決手段】ロボットアーム200のハンド450に位置検出装置10を付加して位置検出機能付きのハンド装置400を構成する。位置検出装置10は、検出領域10Rに向けて位置検出光L2を出射する複数の発光素子12を備えた位置検出用光源部11を有しており、検出領域10Rに位置検出光L2の強度分布を形成する。また、検出領域10Rで反射した位置検出光L3は光検出器30で受光され、その受光結果に基づいて、位置検出部50は、ワークObとハンド450との相対位置を検出する。
(もっと読む)
検査装置および配線回路基板の検査方法
【課題】導体パターンの良否を精度よく検査することのできる検査装置および配線回路基板の検査方法を提供する。
【解決手段】回路付サスペンション基板の金属支持層21および導体パターンに入射する入射光7を発光する発光部2と、入射光7が金属支持層21および導体パターンにおいて反射された反射光11を受光する受光部4とを備え、発光部2および受光部4は、入射光軸13と反射光軸14とが一致するように配置され、発光部2は、入射光軸13と同一直線上にある直線光8と、回路付サスペンション基板に向かうに従って集光され、入射光軸13に対して傾斜する傾斜光9とを含む入射光7を発光する。
(もっと読む)
EUVマスクの欠陥検査方法、EUVマスクの製造方法、および、半導体装置の製造方法
【課題】EUVLにおいて用いるEUVマスクの信頼性を向上させる。
【解決手段】多層膜と吸収体パターンとを有するEUVマスク上の基準パターンを基点にして、吸収体パターンのレイアウトデータをメッシュに区分する(ステップS01)。その後、EUVマスク上に欠陥が無い場合におけるEUV光に対する散乱光の補正信号強度を、メッシュごとに算出する(ステップS03)。それに並列して、EUVマスクにEUV光を照射し、その散乱光の測定信号強度を計測する(ステップS04)。続いて、メッシュごとに、測定信号強度から補正信号強度を差し引くことでメッシュ信号強度を算出する(ステップS05)。そして、メッシュ信号強度の値から位相欠陥の有無を判定する(ステップS06)。ここでは、メッシュ信号強度が所定の閾値を超える場合に、そのメッシュのEUVマスク上に位相欠陥が有ると判定する。
(もっと読む)
撮像方法、画像処理方法および撮像・画像処理装置
【課題】光沢のあり照明光を正反射する被撮像面の正常状態維持領域と加工又は劣化等により非正常状態になった領域を区別することを、手間をかけないで安定的に、所定の精度で、短時間に、低いコストで、且つ自動的に得る方法を提供する。
【解決手段】
カメラの光軸が被撮像面に垂直な方向に対して所定の角度の傾斜を持つようにカメラを配置し、且つカメラの所定の画素範囲に対応する被撮像面上の範囲(撮像範囲)からカメラのレンズの有効径内に入る反射光の内、撮像範囲で正反射された照明光が正反射前に通過するべきトンネル空間(入射光トンネル空間)が照明装置の発光面を貫通するように照明装置を配置し、光沢があり照明光を正反射する被撮像面を撮像する。
(もっと読む)
画像表示装置
【課題】 投射レンズの光軸と、スクリーンの法線の傾きを精度よく検出し、調整者にわかりやすく傾き情報を伝達することができる画像表示装置を得ること。
【解決手段】 画像表示素子と、該画像表示素子により表示された画像をスクリーン上に投射する投射レンズと、該スクリーン上あるいは該スクリーンと同一平面上であって、該投射レンズの光軸と直交する第1方向で該投射レンズの光軸を挟んだ2つの測距点と、該投射レンズの光軸と直交し、該第1方向と直交する第2方向において、前記2つの測距点とは位置が異なる1つの測距点の、少なくとも3つの測距点の距離情報を各々検出する少なくとも3つの距離測定手段と、該3つの距離測定手段で得られる距離情報を表示する表示手段とを備えた画像表示装置であって、該3つの距離測定手段の光軸は、該投射レンズの光軸に対して、同じ角度だけ異なる方向に傾けて配置されていること。
(もっと読む)
板材の光学式形状測定方法及び測定装置
【課題】測定値がばらつき、エッチング加工される精密部品の母材に要求される形状精度を保障可能な測定精度を確保する。
【解決手段】板材形状測定範囲内での等間隔の棒状光源配置と位相変化測定板材上方に棒状光源を配置して、板材表面に観察される棒状光源の鏡像をカメラにて撮影した画像に基づき板材の形状を測定する板材の光学式形状測定方法において、
複数の棒状光源を板材形状測定範囲にわたって等間隔に配置し、カメラにて撮影した画像上の棒状光源の配列方向に垂直な方向の周期的な輝度分布波形を得て、
フラットな基準平面測定時の周期的な輝度分布波形に対する位相変化量を測定することにより、板材表面の角度分布を求めることにより、板材の光学式形状を測定する。
(もっと読む)
パターンマッチング装置およびそれを用いた半導体検査システム
【課題】CADデータに対応する画像データの位置情報を検出するパターンマッチング装置において、CADデータの形状とホールパターンの形状が大きく異なる場合でも、正確にパターンマッチングする。
【解決手段】ホールパターンの中心位置を画像化したデータ111を生成するCADホールパターン中心位置検出手段107と、画像データ105からパターンデータ112を抽出するパターン抽出手段108と、パターンデータ112からホールパターンの中心位置を検出し、画像データ105から検出したホールパターンの中心位置を画像化したデータ113を生成する手段109と、CADホールパターン中心位置データ111と画像ホールパターン中心位置データ113との照合処理により、CADデータ104に対応する画像データ105の位置データ114を検出する照合処理手段110と、信号出力インターフェース103と、で構成する。
(もっと読む)
非接触計測装置および非接触計測方法
【課題】同期信号等の出力インタフェースを有しないカメラを使用し、撮像と被測定物またはカメラの位置情報を、制御回路を使用せずに同期して撮像を行う非接触計測装置および非接触計測方法を提供することを課題としている。
【解決手段】非接触計測装置は、アクチュエーター10、レーザー12、カメラ13、信号処理・制御ユニット20、画像表示装置30から構成されている。信号処理・制御ユニット20は、制御部101と、画像データ取り込み部102と、グレースケール変換部103と、画像データ記憶部104と、相関比較部105と、停止判定部106と、輝度抽出部107と、重心算出部108と、高さ算出部109と、計測結果出力部110とから構成されている。
(もっと読む)
表面形状測定装置
【課題】ワークの表面形状を非接触で高速に測定でき、測定時のワークの振れを特殊な機構を用いることなく補正可能であるなど極めて実用的な表面形状測定装置の提供。
【解決手段】ワークに測定光を照射する照明手段と、測定光の反射光を撮像する撮像手段とを有し、ワークと撮像手段とを相対的に回転させながら該ワークの外周表面に測定光を照射し、このワークからの反射光を撮像手段により撮像して該ワークの表面形状を測定する表面形状測定装置であって、測定光をワークに撮像手段の光軸と同軸方向で照射する同軸落射照明手段を有し、更に、撮像手段により撮像した各画像データに基づいて撮像手段の光軸方向成分においてワークの外周上で該撮像手段に最も近い点の該撮像手段の光軸垂直面内における変位を積分し該ワークの表面形状を算出する演算手段を有するもの。
(もっと読む)
樹脂厚測定装置
【課題】表面がフラットでない樹脂層の厚みを正確に測定する。
【解決手段】光透過性着色樹脂層(樹脂層)3が表面に形成された線材2を含む撮像領域Dを撮像して画像データD1を出力するカメラ5と、樹脂層3の厚みと彩度との対応を示す彩度相関データ、および樹脂層3の厚みと色相情報との対応を示す色相相関データが記憶された記憶部6と、画像データD1を画像処理して撮像領域D内の各位置における彩度および色相を抽出する色情報抽出処理、彩度および色相と彩度相関データおよび前記色相相関データとに基づいて撮像領域D内における樹脂層3の形成領域を検出する領域検出処理、並びに彩度および色相のうちのいずれか一方の情報と彩度相関データおよび色相相関データのうちのこの一方の情報に対応する一方の相関データとに基づいて形成領域における樹脂層3の厚みを測定する厚み測定処理を実行する画像処理部7とを備えている。
(もっと読む)
移動検出装置および記録装置
【課題】 ダイレクトセンシングで物体の移動状態を高精度で且つ確実に検出すること。
【解決手段】 搬送ベルトには複数の孤立パターンから構成される検出用パターンがマーキングされている。第1画像データから切り出したテンプレートパターンに含まれる検出用パターンの一部が、いかなる場合も第2画像データのサーチ領域内で唯一の固有パターンとなるように、検出用パターンの中の複数の孤立パターンの形態、テンプレートパターンを切り出すテンプレート領域のサイズ、サーチ領域のサイズが関係付けられている。
(もっと読む)
搬送監視装置および搬送監視方法
【課題】被搬送物と撮像部との間に透明体が介在する監視環境にあっても、被搬送物の搬送状態を高精度に管理可能な装置及び方法を提供する。
【解決手段】第1の搬送監視装置10Aは、透明体1越しに被搬送物2の搬送状態を監視し、被搬送物2及び搬送部3の画像を取得する撮像部11と、撮像部11が取得した画像のベクトルデータを演算する演算部12と、被搬送物2及び搬送部3のモデルデータを記憶する記憶部13,14と、画像中の被搬送物2及び搬送部3の位置を抽出する位置抽出部15,16と、被搬送物2及び搬送部3の相対的位置を算出する相対位置算出部17と、被搬送物2及び搬送部3の正常な相対的位置関係を記憶する記憶部18と、相対位置算出部17が算出した相対位置が正常か否かを判定する判定部19と、判定部19での判定結果に応じて所定の警告を発する警告部20とを具備する。
(もっと読む)
201 - 220 / 781
[ Back to top ]