
Fターム[2F065FF42]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 反射、散乱光の分布 (3,485) | 分布の形 (781)
Fターム[2F065FF42]に分類される特許
161 - 180 / 781
画像処理装置
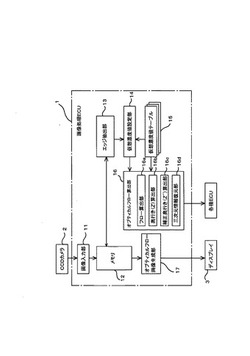
【課題】本発明は撮像手段により撮像して得られた撮像対象の動画像におけるフレーム画像を取得し、取得されたフレーム画像間での前記撮像対象の濃度の動きをベクトルで表現するオプティカルフローを算出する画像処理装置を提供する。
【解決手段】本発明の画像処理装置は、前記フレーム画像における前記撮像対象のエッジを抽出し、該エッジを構成する所定点でのオプティカルフローを算出し、算出された所定点でのオプティカルフローから該所定点の奥行きを算出し、前記所定点での奥行きにFOEのY座標からの距離に応じて変化する変数を乗算して補正奥行きを算出し、前記補正奥行きから所定点における三次元情報を復元する。
(もっと読む)
環境に配置された物体の表面上の放物線状湾曲の点を求めるための方法およびシステム

【課題】カメラ−物体対と環境との間の相対運動のもとでカメラによって取得された物体の画像のセットから鏡面物体の表面上の放物線状湾曲の点を求めるためのシステムおよび方法を提供する。
【解決手段】方法は、画像のセットにおける各画像の各ピクセルにおける画像勾配の方向を求める。ここで、物体の表面上の同一点に対応する異なる画像からのピクセルが、対応するピクセルを形成する。画像勾配の実質的に一定の方向を有する対応するピクセルは、放物線状湾曲の点を表すピクセルとして選択される。
(もっと読む)
通過者検出装置、通過者検出方法
【課題】規定の領域を通過する通過者の体型の推定を比較的安価な構成で可能にする。
【解決手段】2次元情報を取得する距離センサ2を、人が通過する枠部材1の上部に設ける。距離センサ2は、枠部材1の内側の平面を人が通過する期間における複数の異なる時刻において、2次元情報を取得する。複数の2次元情報は形状推定部32に入力される。形状推定部32は、2次元情報を用いて前記平面を通過する人の頭部の左右幅を計測するとともに頭部の左右幅から頭部の前後幅を推定する。さらに、前記平面を人が通過する間に取得した複数の2次元情報から人の3次元形状の推定に必要な2次元情報を選択し、通過方向における当該2次元情報の間隔を頭部の前後幅から求めることにより、人の3次元形状を推定する。
(もっと読む)
半導体ウェハの表面検査システム及び表面検査方法
【課題】半導体ウェハ表面に存在するソーマークなどの線状の凹凸について、短時間かつ容易に検査が可能であり、検査に対する振動の影響を低減できる技術を提供する。
【解決手段】半導体ウェハWの表面の全域に光源装置2によって斜め方向から光を照射し、CCDカメラ4で半導体ウェハW全体を撮影する。これにより、半導体ウェハWの各ポイントからの前記照射光の反射光または散乱光の強度を検出する。取得された光の2次元的な強度分布に基づいて、半導体ウェハWの表面に生成されたソーマークなどの凹凸を検出し、またはその大きさを測定する。
(もっと読む)
外観検査装置
【課題】
光学素子の欠陥を精度よく確認することができる外観検査装置を提供すること
【解決手段】
本発明の外観検査装置は、基板7の欠陥を検出する外観検査装置であって、前記基板7の平面に対してそれぞれ斜めに光を照射するとともに前記基板7を挟んで配置された複数の低倍率カメラ用光源3と、これらの低倍率カメラ用光源3の光軸と交差する方向に光軸を有するとともに、前記低倍率カメラ用光源3から照射されて前記基板7から反射または透過する光を撮像する低倍率カメラ4と、前記基板7の平面に対して垂直に光を照射する高倍率カメラ用光源5と、この高倍率カメラ用光源5の光軸と同一の光軸を有するとともに前記高倍率カメラ用光源5から照射されて前記基板7で反射された光を撮像する高倍率カメラ6と、を備えることを特徴とする。
(もっと読む)
距離画像カメラを用いた物体寸法測定方法および物体寸法測定装置
【課題】距離画像カメラを配置するだけで、カメラの解像度を超える寸法測定精度を実現可能な物体寸法測定方法および物体寸法測定装置を提供する。
【解決手段】載置面に何も載置されていない状態で撮像して第1距離画像を取得する第1撮像工程と、前記第1距離画像に基づいて前記載置面の方程式を算出する載置面方程式算出工程と、前記載置面に載置された直方体の少なくとも上面が写るように撮像して第2距離画像を取得する第2撮像工程と、前記第2距離画像に基づいて前記上面の方程式を算出する上面方程式算出工程と、この上面方程式算出工程で方程式が算出された前記上面を前記第2距離画像の中で前記載置面に射影し、前記載置面を回転させながら前記上面の射影の横軸方向および縦軸方向の各範囲幅の合計値をそれぞれ算出して、最小となった回転角度での合計値を前記上面の隣接する2辺の寸法の合計値として算出する寸法算出工程とを含む。
(もっと読む)
画像処理装置、及び画像処理プログラム
【課題】2時刻法により被撮像物の変状部分の位置を検出する確率が高い画像処理装置を提供する。
【解決手段】第1撮像時間帯に被撮像物を撮像して得られた複数の画像フレームからなる第1温度画像データと、第2撮像時間帯に被撮像物を撮像して得られた複数の画像フレームからなる第2温度画像データと、第1温度画像データ及び第2画像データの各画像フレームを撮像した位置の情報とを用いて、第1温度画像データと第2温度画像データと位置の情報とに基づき、各第1温度画像データの画像フレームとそれに一部重複する第2温度画像データの画像フレームとを対応付ける。また、対応付けられた第1温度画像データの各画像フレームの温度値のピークの位置と、対応付けられた第2温度画像データの各画像フレームの温度値のピークの位置とを検出するとともに、温度値のピークが被撮像物の座標上で一致する場合に、一致したピークの位置を変状位置として検出する。
(もっと読む)
検査装置および検査方法
【課題】光学画像のパターンと基準画像のパターンとの位置合わせを高い精度で行いつつ、且つ、高速で欠陥検出のできる検査装置および検査方法を提供する。
【解決手段】画像センサから試料の光学画像を取得する工程と、光学画像および判定の基準となる基準画像のいずれか一方について、そのX方向とY方向の移動量をそれぞれα(0≦α<1)とβ(0≦β<1)として、αおよびβと光学画像と基準画像の差分の2乗和との関係を表す方程式を求める工程と、この方程式から得られる差分の2乗和が最小となる(α,β)の組から、位置合わせに最適な移動量を求める工程とを有する。この方程式についてαおよびβの偏微分を解くことにより、位置合わせに最適な移動量を求めてもよい。
(もっと読む)
視覚検査システム
【課題】ワークに対してカメラを任意の位置、姿勢に移動させながら視覚検査を行うことができるものであって、設備全体の小型化を図る。
【解決手段】支持台2上にYZロボット3を設け、その前方に回転テーブル4を設ける。YZロボット3は、Z軸移動機構5、Y軸移動機構6、前後(Y軸)方向に延びる光軸Oを有しワークWを撮影するカメラ7を備え、カメラ7を前後(Y軸)及び上下(Z軸)方向に自在に移動させる。回転テーブル4は、ワークWを載置し、垂直方向に延びる回転軸θ周りに自在に回転させる。カメラ7の先端に180度以上の画角を有する超広角レンズ10を設ける。
(もっと読む)
パターン評価方法及びパターン評価装置
【課題】SEM画像を利用したパターン計測において、計測対象のパターンに比較的大きな欠陥が含まれている場合でも、基準パターンとのマッチングを高精度に実施することができるパターン評価方法及びパターン評価装置。
【解決手段】基準パターン画像及び計測対象パターン画像から、各パターンの輪郭線を抽出し、抽出した各パターンの輪郭線からパターンのコーナー部分や欠陥部分などに相当するノイズ領域を除去してパターンマッチング用輪郭線を生成する。続いて、基準パターンのパターンマッチング用輪郭線と、計測対象パターンのパターンマッチング用輪郭線とのマッチングを行い、マッチングした位置で元の輪郭線同士を重ね合わせ表示する。そして、その重ね合わせ画像から、基準パターンと計測対象パターンとの差分を計測する。
(もっと読む)
パターン寸法測定方法
【課題】フォトマスクのパターン寸法をパターン形状が次世代フォトマスクのように複雑な形状であっても精度良く測定することのできるパターン寸法測定方法を提供する。
【解決手段】フォトマスクのパターンを撮像してパターン寸法を測定する際に、パターン画像の画素数をパターン寸法に変換するパターン寸法変換式をテストパターンの寸法計測値とテストパターン画像の画素数とから求めておき、パターン画像の画素数をパターン寸法変換式によりパターン寸法に変換してフォトマスクのパターン寸法を測定する。
(もっと読む)
溶接部アンダーカット検査装置
【課題】溶接部のアンダーカットによる溶接欠陥の存在とその大きさを検出する簡易な溶接部アンダーカット検査装置を提供すること。
【解決手段】広がりを有する帯状のレーザ光Lを照射して被検査部10の形状を検出するための2次元変位計2と、検出データを基に被検査部の断面外形を演算するコントローラ3と、演算結果を表示するディスプレイ4とを有し、被検査部10の断面外形から母材と溶接ビードとの境界部分220に生じるアンダーカットを検出するものであり、コントローラ3は、断面外形によって特定される母材表面を示す母材線221と溶接ビード表面を示す溶接線225とを基に、母材線221から基準線230を求め、その基準線230に対する法線方向について溶接線の最大深さを算出するようにした溶接部アンダーカット検査装置1。
(もっと読む)
画像測定機
【課題】撮像手段の視野よりも大きい被測定物を測定する場合であっても被測定物を適切に測定することができる画像測定機の提供。
【解決手段】画像測定機1は、被測定物、及び撮像手段21を相対的に移動させて撮像手段21に複数の画像を撮像させる撮像制御部32と、撮像手段21にて被測定物を撮像する位置を取得する位置取得部33と、撮像制御部32にて撮像される各画像を重畳させて連結させることで連結画像を生成する連結画像生成部34と、位置取得部33にて取得される位置に基づいて、連結画像を生成する際に連結部分で生じる誤差を連結部分ごとに算出する誤差算出部35と、連結画像における画素の数に基づいて、被測定物を測定する画像測定部36と、誤差算出部35にて算出される連結部分ごとの誤差に基づいて、画像測定部36による測定結果を補正する補正部37とを備える。
(もっと読む)
ホールラフネス定量化装置及びホールラフネス定量化方法
【課題】フォトマスクなどに形成されたホールパターンのラフネスを定量化する際に定量化すべき箇所を人為的に指定したりすることなくラフネスを迅速かつ正確に定量化することのできるホールラフネス定量化装置及びホールラフネス定量化方法を提供する。
【解決手段】計測対象パターンとリファレンスパターンの輪郭線から計測対象パターンのラフネスを定量化する際に、計測対象パターンの輪郭線上に位置する複数点の位置座標とリファレンスパターンの輪郭線上に位置する複数点の位置座標との差分距離を算出し、算出された差分距離に基づいて計測対象パターンのラフネス値を算出する。
(もっと読む)
曲率中心検出装置及びこれを使用した孔位置検出方法
【課題】球面部を有する球状体の曲率中心の位置を精度良く、且つ効率的に検出することのできる曲率中心検出装置及びこれを使用した孔位置検出方法を提供する。
【解決手段】一定の曲率半径を有して形成された球状体1の曲率中心を検出する曲率中心検出装置であって、前記球状体1の断面形状を計測する2次元変位センサ21と、該2次元変位センサ21より計測された前記断面形状に関する情報に基づいて、前記球状体1の曲率中心を演算する演算部23とを備えている。
(もっと読む)
CCDカメラ用標識体
【課題】汚損が進行しても、CCDカメラでの濃淡の判別に支障が生じることを抑制することが可能で、CCDカメラで取得する撮像データの信頼性を高めることができ、システムの誤動作や不良品の発生を防止できると共に、メンテナンスも軽減することができ、位置検出対象である装置の稼働率の低下を防止して生産性を向上することができるCCDカメラ用標識体を提供する。
【解決手段】位置検出対象の位置情報を取得するためにCCDカメラで撮像されるCCDカメラ用標識体1であって、位置検出対象に設置される標識体本体8と、標識体本体にその表面部8aから内奥へ向かって形成される真直穴9と、標識体本体に真直穴と連接して形成され、CCDカメラの光軸Xに対して傾斜する傾斜反射面10aを有して、真直穴に進入した光x1を減衰させるテーパ状凹部10と、標識体本体の表面部に、真直穴の開口部を取り囲んで形成された光反射面12とを備えた。
(もっと読む)
半田印刷検査装置及び半田印刷システム
【課題】半田印刷を行うにあたり、生産性の低下抑制等を図ることのできる半田印刷検査装置及び半田印刷システムを提供する。
【解決手段】半田印刷検査装置は、CCDカメラによって撮像された画像データに基づき、2つのランド2a,2bと接する半田ブリッジ3bを検出し、当該半田ブリッジ3bと接する2つのランド2a,2bの間の距離L1をブリッジ距離として算出する。そして、当該距離L1が許容範囲内であるか否かを判定し、当該距離L1が許容範囲内でないと判定した場合に、所定の重欠陥処理を実行する。
(もっと読む)
位置姿勢推定装置及びその方法
【課題】 物体・撮影環境において、安定的に物体の位置及び姿勢を計測することを目的とする。
【解決手段】 物体を撮影した撮影画像を入力する。物体の3次元座標を含む距離画像を入力する。撮影画像から画像特徴を抽出する。画像特徴に対応する距離画像上の位置における3次元座標から、画像特徴が物体の形状を表すか否かを判別する。物体の形状を表すと判別された画像特徴と物体の形状を有する3次元モデルの一部とを対応付ける。対応付けに基づいて、物体の位置姿勢を推定する。
(もっと読む)
端子圧着不良検出装置
【課題】 端子取付部の画像を撮影して端子圧着不良の検出を行うに当たって、画像の位置調整の処理を簡単化する。
【解決手段】 端子付き電線4を移動させたまま端子部の画像データをカメラ2で撮影し、取得した画像データについて、所定の枠内において、電線を横切る方向に、複数回平行に走査して各ライン毎に輝度の重心点を求め、各重心点に基づいて第1の座標軸を決定する。また、前記画像データ全体について、電線を横切る方向に、複数回平行に走査してライン毎に、隣接する画素間の輝度の差を積算して、積算値の変化パターンを生成し、該変化パターンを前記第1の座標軸方向に移動させながら、基準パターンと比較し、最も一致する位置に基づいて、前記第1の座標軸と直交する第2の座標軸を決定する。そして、両座標軸を基準として前記画像データの位置を調整し、端子圧着状態の良否判定を行う。
(もっと読む)
位置姿勢計測装置
【課題】 対象物体と非対象物体の像を含む距離画像データを入力として対象物体の位置姿勢を推定する処理の高速化、及びメモリ消費量の軽減を目的とする。
【解決手段】 物体を撮影した距離画像上で物体に相当する物体領域に基づいて、該物体の位置姿勢を計測する。そのために、距離画像の領域を分割した部分領域群のうち少なくとも1つの部分領域を物体領域として設定する。物体領域に物体の形状モデルを当て嵌めて、物体の位置姿勢を推定する。当て嵌めの誤差に基づいて、物体領域を更新する。
(もっと読む)
161 - 180 / 781
[ Back to top ]