
Fターム[2F065FF55]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 干渉利用 (1,883) | 測長干渉計の利用 (236)
Fターム[2F065FF55]に分類される特許
1 - 20 / 236
レーザトラッカー
表面検査装置及び表面検査方法
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
エンコーダ装置、光学装置、及び露光装置
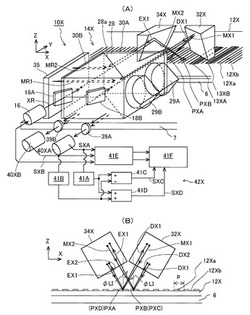
【課題】回折格子を用いて計測を行う際に、相対位置を予め定められた相対位置からの絶対位置として容易に計測する。
【解決手段】エンコーダ10Xは、第1部材6に設けられ、格子パターン12Xa及び基準パターン13XAが形成された回折格子12Xと、計測光MX1,MX2を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1,MX2を格子パターン面12Xbにθy方向(X方向)に対称な角度で傾斜させて入射させる傾斜ミラー32X,34Xと、計測光MX1,MX2の回折格子12Xによる回折光DX2,EX2を受光する光電センサ40XA,40XBと、を有する。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法

【課題】複数のZヘッドを切り換えながら、移動体の高さと傾斜を継続的に計測することにより、移動体を高精度で駆動する。
【解決手段】制御装置は、テーブルWTBの±X端部に設置された反射面39Y1,39Y2上に位置する2つのZヘッドZsR,ZsLを用いて、テーブルWTBの高さと傾斜を計測する。テーブルWTBのXY位置に従って、使用するZヘッドをZsR,ZsLからZsR’,ZsL(あるいはZsR,ZsL’)に切り換える。制御装置は、切り換えの際、座標つなぎ法を適用して、新たに使用するZヘッドZsR’(あるいはZsL’)の初期値を設定する。これにより、テーブルのXY位置に応じて使用するZヘッドが逐次切り換えられるにもかかわらず、切り換えの前後でテーブルの高さと傾斜の計測結果が保存され、テーブルを高精度で駆動することが可能になる。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】 エンコーダで位置を計測しつつ、移動体を所望の方向へ精度良く駆動する。
【解決手段】 駆動装置により、ウエハステージWSTのY軸方向の位置情報を計測するエンコーダ62Aの計測値とそのエンコーダによって計測されるスケール39Y1の平面度に関する情報とに基づいて、ウエハステージWSTがY軸方向に駆動される。この場合、駆動装置は、そのエンコーダの計測値に含まれるスケールの平面度に起因する計測誤差をスケールの平面度に関する情報に基づいて補正した補正後の計測値に基づいて、ウエハステージを所定方向に駆動することが可能である。従って、スケールの凹凸に影響を受けることなく、エンコーダを用いてウエハステージを精度良く所定方向に駆動することが可能となる。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】経年変化に伴ってレーザー測長系のレーザー光源の出力特性が変化しても、移動ステージの位置を精度良く検出して、基板の位置決めを精度良く行う。
【解決手段】移動ステージに複数の反射手段34a,34b,35を取り付け、複数のレーザー干渉計32a,32b,33により、レーザー光源31a,31bからのレーザー光と各反射手段34a,34b,35により反射されたレーザー光との干渉を複数箇所で測定する。各レーザー干渉計32a,32b,33の測定結果から、移動ステージの位置を検出し、検出結果に基づき、移動ステージによりチャック10a,10bを移動して、基板1の位置決めを行う。各レーザー干渉計32a,32b,33が受光したレーザー光の強度の変化を検出し、検出したレーザー光の強度の変化を補う様に、レーザー光源31a,31bへ供給する駆動電流を制御する。
(もっと読む)
タービン組立静止部品の位置計測装置
【課題】熟練者でなくても容易迅速にタービン組立静止部品の位置を計測する装置を提供する。
【解決手段】位置計測装置は、タービンの回転中心に沿ってレーザー光21を出射するレーザー光源部1と、レーザー光の光軸に対して45度の傾斜角度で配置され、上記出射レーザー光の一部を90度の角度で反射してタービンの静止部品11に照射する反射鏡兼透過鏡33と、この鏡を透過したレーザー光を受光する第1の受光器34と、上記静止部品に照射されて反射し上記反射鏡兼透過鏡を透過したレーザー光を受光する第2の受光器35と、上記反射鏡兼透過鏡と第1の受光器と第2の受光器とを収容する筺体31と、受信信号を演算してレーザー光源部から静止部品までの回転中心に沿う距離と上記回転中心から静止部品表面までの距離を演算する制御演算装置2とを備え、上記筺体がタービンの回転中心周りに回転自在に構成されている。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】ステージを正確に2次元駆動する。
【解決手段】 XエンコーダとYエンコーダとを少なくとも各1つ含む3つのエンコーダを用いて、ステージWSTの移動面内の位置情報を計測する。ステージWSTの位置計測値に基づいて、位置計測に用いるエンコーダを、エンコーダEnc1,Enc2及びEnc3から、エンコーダEnc4,Enc2及びEnc3に切り換える。切り換えの際、座標つなぎ法又は位相つなぎ法を適宜切り換えて適用して、新たに使用するエンコーダEnc4の初期値を設定する。それにより、ステージWSTの位置計測に用いるエンコーダが逐次切り換えられるにもかかわらず、切り換えの前後でステージの位置計測値が保存され、ステージを正確に2次元駆動することができる。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、計測方法、並びに位置計測システム
【課題】面位置センサの設置位置を計測し、該計測された設置位置に基づいて面位置センサを用いて移動体の2次元移動面の垂直方向と傾斜方向の位置座標を計測することにより、移動体を安定かつ高精度に駆動する。
【解決手段】 干渉計システムを用いてウエハステージWSTのXY位置を監視しながらウエハステージを移動させて、面位置センサ72k,74i,76jを用いてYスケール39Y3,39Y4を、X軸方向及びY軸方向に走査することにより、面位置センサのXY設置位置を計測する。得られた設置位置情報に基づいて、面位置センサを用いて、ウエハステージのXY平面(移動面)に対する垂直方向と傾斜方向の位置座標を計測することにより、ウエハステージを安定かつ高精度に駆動する。
(もっと読む)
露光装置、デバイス製造方法、及びクリーニング方法
【課題】汚染に起因する性能の劣化を抑制できる露光装置を提供する。
【解決手段】露光装置は、露光光の光路を第1液体で満たすように第1液体で液浸部を形成可能な第1部材と、第1部材から離れた位置で第2液体で液浸部を形成可能な第2部材と、所定部材と第2部材との間の第2液体に振動を与える振動発生装置とを備え、第2液体を用いて所定部材をクリーニングする。
(もっと読む)
測定補助器具およびそれを用いた直径測定方法
【課題】 円環状の測定対象物に対してレーザトラッカーから見て反対側の周面の空間座標を測定することを可能にし、測定時の取扱いが簡単で、一人でも容易に直径を測定することができる測定補助器具を提供する。
【解決手段】 測定補助器具20は、ターゲットTgが設置されるターゲット設置部21と、ターゲット設置部21を測定対象物Wの円周方向に移動させる移動機構部22とを備える。移動機構部22は、測定対象物Wの測定対象周面である外周面Waに転接する第1の周面接触部材26と、測定対象物Wの内周面Wbに転接する第2の周面接触部材27と、測定対象物Wの上端面Wcに転接する端面接触部材28とを有する。第1の周面接触部材26は、ターゲット設置部21の中心を通る鉛直方向の軸O1回りに回転自在である。第1または第2の周面接触部材26,27を回転させる移動用回転駆動源41を設ける。
(もっと読む)
測定装置
【課題】被測定面の形状を高精度に測定することができる技術を提供する。
【解決手段】被測定面の形状を測定する測定装置であって、前記被測定面に接触する接触部材を含むプローブを保持するプローブハウジングと、前記被測定面に対する位置及び姿勢が固定され、前記被測定面の形状を測定するための基準となる基準ミラーと、前記基準ミラーと前記プローブとの間の第1距離を測定する第1距離測定部と、前記プローブハウジングと前記プローブとの間の第2距離を測定する第2距離測定部と、前記第2距離測定部で測定される前記第2距離が一定距離となるように前記プローブハウジングを駆動させながら前記第1距離測定部で測定される前記第1距離から前記接触部材の位置を特定し、当該接触部材の位置に基づいて前記被測定面の形状を算出する処理部と、を有する。
(もっと読む)
パターン形成装置及びパターン形成方法、移動体駆動システム及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】パターンが形成される物体を保持する移動体を安定して位置制御する。
【解決手段】露光装置は、ウエハを保持して所定平面内で移動するウエハステージと、所定平面内でウエハステージとは独立に移動する計測ステージと、計測ステージの位置情報を計測する干渉計システム118と、ウエハステージの位置情報を計測する、干渉計システム118に比べて計測値の短期安定性が優れるエンコーダシステム(70A〜70F)と、を備えている。このため、露光装置によると、干渉計システム118により計測ステージの位置情報が計測され、エンコーダシステム(70A〜70F)によってウエハステージWSTの位置情報が計測される。従って、パターンが形成されるウエハを保持するウエハステージを安定して位置制御することが可能となる。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
観察方法、露光装置、及びデバイス製造方法
【課題】液浸法で露光を行う露光装置の液体に接する部分に異常があるかどうかを効率的に判定する。
【解決手段】露光光ELで投影光学系PLと液体1とを介して基板Pを露光する露光方法において、液体1に接する接液部を光学的に観察し、得られる第1画像データを記憶する第1工程と、接液部の液体1との接触後、例えば液浸露光後に接液部を光学的に観察して第2画像データを得る第2工程と、第1画像データと第2画像データとを比較して、その観察対象部の異常の有無を判定する第3工程とを有する。
(もっと読む)
マーク検出方法及び装置、並びに露光方法及び装置
【課題】物体に設けられた複数のマークをより短時間に高精度に検出する。
【解決手段】ウエハマークの位置を検出するマーク検出方法であって、複数のアライメント系AL1,AL21〜AL24の検出領域に対してウエハWを移動中に、アライメント系AL1,AL21〜AL24とウエハWの表面とのデフォーカス量を計測し、この計測結果に基づいてウエハWの面位置及び傾斜角の少なくとも一方を制御し、ウエハマークWMC1,WMA1,WMD1がアライメント系AL22,AL1,AL23の検出領域内に達したときに、ウエハWを静止させて、アライメント系AL22,AL23で対応するウエハマークWMC1,WMD1の位置を検出する。
(もっと読む)
接触式プローブおよび形状測定装置
【課題】 プローブの伸び、及び周辺空気の温度、湿度の影響を抑えた高精度な形状測定を行うことのできる形状測定用の接触式プローブおよび形状測定装置を提供する。
【解決手段】 プローブシャフト2と先端球16を備えた接触式プローブ1において、
前記プローブシャフト2内の測長光路の少なくとも一部に透明体を設けることにより、少なくともこの部分だけ空気に暴露された光路を減らすことができる。その結果、外気の屈折率変化による測定誤差を抑え、精度を向上させることができる。
(もっと読む)
計測装置
【課題】装置の高コスト化を抑えながら、被検面の形状を高精度に計測することができる技術を提供する。
【解決手段】被検物を保持する保持面を含む保持部と、被検面と被検面の形状を計測するための基準となる基準位置との間の距離を計測する距離計測部と、基準位置が被検面に沿うように距離計測部を駆動する駆動部と、駆動部によって駆動される距離計測部の基準位置を測定する位置測定部と、距離計測部によって計測された被検面と基準位置との間の距離と位置測定部によって測定された基準位置とに基づいて被検面の形状を算出する処理部と、を有し、位置測定部は、距離計測部に配置されて互いに異なる測定軸を有するレーザ干渉計と、レーザ干渉計のそれぞれからの光をそれぞれ反射する基準ミラーとを含み、レーザ干渉計の原点と基準ミラーとの間の距離を測定することで基準位置を測定し、基準ミラーの法線が保持面を含む面に交差するように配置される。
(もっと読む)
干渉計及び測定方法
【課題】参照面と被検面との間の距離の測定に有利な技術を提供する。
【解決手段】光源からの光を2つの光に分割して、一方の光を参照面に入射させ、他方の光を被検面に入射させ、前記参照面で反射された光と前記被検面で反射された光との干渉光を検出する検出部と、距離を求める処理を行う処理部、前記光源からの光の波長を固定しての干渉光である第1の信号と、前記光源からの光の波長を連続的に変更させながらの干渉光である第2の信号、前記第2の信号を周波数解析して前記第2の信号に含まれる周期誤差を算出し、前記第1の信号に含まれる周期誤差と前記第2の信号に含まれる周期誤差との対応関係を表すテーブルを用いて、前記算出された前記第2の信号に含まれる周期誤差に対応する前記第1の信号に含まれる周期誤差を特定し、前記第1の信号から前記特定された周期誤差を減算し、前記参照面と前記被検面との間の光路長に対応する位相を求める。
(もっと読む)
1 - 20 / 236
[ Back to top ]