
Fターム[2F065FF61]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 標準物の利用 (810)
Fターム[2F065FF61]に分類される特許
81 - 100 / 810
表面形状の評価方法および評価装置
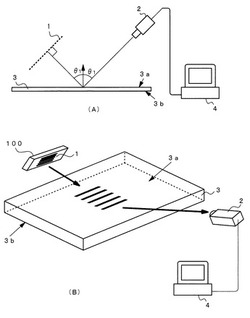
【課題】第1表面に対向する第2表面による反射像の影響を受けずに被評価物体の表面形状を精度よく評価することができるようにする。
【解決手段】評価装置は、評価対象である板ガラスなどの被評価物体3の表面3aに映し出されたストライプパターン1を、CCDカメラ2によって撮像するように構成されている。ストライプパターン1は、光源の発光面に設けられている。また、光源が発射する光の波長は、200〜380nmである。CCDカメラ2によって撮像された画像は、演算装置としてのコンピュータ4に取り込まれ、コンピュータ4によって画像解析が行われる。
(もっと読む)
内燃機関の変位計測装置

【課題】車両に搭載された内燃機関の変位量を容易にして精度良く計測可能な内燃機関の変位計測装置を提供する。
【解決手段】変位測定手段による第1被測定体と第2被測定体の測定結果に基づいて内燃機関の変位量を算出する変位量算出手段を備え、該変位量算出手段は、第1被測定体の第1測定面上に変位測定手段による測定点を含んで形成される第1直線部分l1、l'1の延長線と第2被測定体の第2測定面上に変位測定手段による測定点を含んで形成される第2直線部分m1、m'1の延長線との交点P(X、Z)、P'(X'、Z')を求め、該交点の第1直線部分と第2直線部分とにより形成される基準平面上での変位を演算することで内燃機関の変位量を算出する。
(もっと読む)
形状計測装置および形状計測方法
【課題】1つのカメラの視野に入らない計測対象物の裏側の形状まで精度良く計測する装置および方法を提供する。
【解決手段】計測対象物に格子模様を投影する格子模様投影部と、計測対象物の周囲に配置された少なくとも1つの鏡と、計測対象物および鏡に映る計測対象物の鏡像の画像を撮影する少なくとも1つの撮影部と、計測対象物の画像と鏡像の画像の各々に対して位相解析処理を施して計測対象物の形状を算出するとともに撮影された前記計測対象物の画像と前記鏡像の画像とを合成する解析処理部とを備え、撮影部の各々は、計測対象物の少なくとも一部の領域と該少なくとも一部の領域の鏡像とを同時に撮影可能に配置されていることを特徴とする。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
平面度測定装置
【課題】変位計と測定対象物との間の相対移動に起因する誤差を適切に補正すること。
【解決手段】測定対象物の一次元形状を測定する変位計と測定対象物との間の相対位置をずらしながら測定対象物の平面度を測定する平面度測定装置は、第1方向の第1測定ラインに沿って被測定面の一次元形状を測る第1測定と、第1測定ラインと第1交差点P2で交差する第2方向の第2測定ラインに沿って被測定面の一次元形状を測る第2測定と、第2測定ラインおよび第1測定ラインとそれぞれ第2交差点P3および第3交差点P1で交差する第3方向の第3測定ラインに沿って被測定面の一次元形状を測る第3測定と、第1測定による第1の一次元形状を示す第1の測定値列DL1、第2測定による第2の一次元形状を示す第2の測定値列DL2、および第3測定による第3の一次元形状を示す第3の測定値列DL3を第1交差点P2乃至第3交差点P1においてそれぞれ一致させるように第1の測定値列DL1乃至第3の測定値列DL3を補正する補正処理と、を行う。
(もっと読む)
パターン形成装置、マーク検出装置、露光装置、パターン形成方法、露光方法及びデバイス製造方法
【課題】移動体の位置を高精度に制御しつつ、物体上の複数のマークの検出時間を短縮する。
【解決手段】 露光装置は、ウエハWを保持してXY平面内で移動するとともに、上面にY軸方向を周期方向とする格子を有する一対のYスケール39Y1、39Y2が設けられたウエハステージWSTと、X軸方向に関して検出領域の位置が異なる複数のアライメント系AL1、AL21〜AL24と、X軸方向に関して前記複数の検出領域の両外側に1つずつ配置される一対のYヘッド64y1、64y2を含む複数のYヘッド64を有し、一対のYスケールの少なくとも一方と対向するYヘッドによって、ウエハステージWSTのY軸方向の位置情報を計測するYエンコーダと、を備えている。このため、ウエハステージWSTのY軸方向の移動の際に、ウエハ上の複数のマークを複数のアライメント系で同時に計測可能になる。
(もっと読む)
キャリブレーション用校正治具、校正治具を備えた3次元計測システム
【課題】低コストで取り扱いが容易な3次元計測システムにおけるキャリブレーション用校正治具であって、対象物を両面から三次元計測する場合にも精度高く簡易にキャリブレーションを行うことができるキャリブレーション用校正治具を提供する。
【解決手段】本発明による校正治具は、3次元計測システムに用いられる校正治具であって、二つの平面を有する本体にキャリブレーションの基準となるキャリブレーションパターンとして、一又は二以上の角錐台形状の貫通穴を形成することで両平面にキャリブレーションパターンが形成されていることを特徴とする。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
部品実装装置及び部品実装方法
【課題】部品装着前の位置合わせに必要な装置誤差のデータを正確に取得して部品を高精度で基板に装着することができる部品実装装置及び部品実装方法を提供することを目的とする。
【解決手段】装着ヘッド15のツール(部品用ツール20又は治具用ツール20J)の加熱を行うヘッド側加熱ヒータH1のほか、治具部品JGが載置される治具部品載置部AR2の加熱を行う載置部側加熱ヒータH2を備え、治具部品載置部AR2の温度がヘッド側加熱ヒータH1によって加熱された治具用ツール20Jの温度とほぼ同じ温度になるように載置部側加熱ヒータH2の制御を行う。
(もっと読む)
カメラポーズ情報算出装置およびカメラポーズ情報算出プログラム
【課題】GPS装置や地磁気センサ等の検出装置を用いずに、カメラの位置や姿勢を示すカメラポーズ情報を算出すること。
【解決手段】メディア媒体に対応する画像領域である位置情報埋込領域をカメラ画像データから抽出し、電子透かしにおいて電子的に埋め込まれた媒体位置情報を前記位置情報埋込領域から抽出するとともに、前記メディア媒体の位置情報が示す位置と対応する当該位置情報埋込領域の位置を示す座標を示す画像座標情報を前記位置情報埋込領域から抽出する位置情報抽出手段と、前記位置情報抽出手段が抽出した前記媒体位置情報および当該媒体位置情報に対応する前記画像座標情報に基づき、前記実空間中における前記カメラの位置と姿勢を示すカメラポーズ情報を算出するカメラポーズ情報算出手段と、を備えることを特徴とする。
(もっと読む)
検知装置、及び、検知方法
【課題】車両の側方に搭載されたカメラが撮影した車外画像のみに基づいてカメラの光軸の位置ズレを簡易に検知できる技術を提供する。
【解決手段】車両と相対的に移動する物体の像の車外画像中の移動軌跡と基準となるラインとを比較してカメラの光軸の位置ズレを検知するため、検知装置はカメラの光軸の位置ズレを車外画像のみで簡易に検知することができる。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】カメラの取り付け位置や取り付け姿勢の情報を迅速かつ精度良く得ることを課題とする。
【解決手段】設定部232は、4個のマーカーが映し出された画像平面上の4個に対応するカメラ座標系における仮想的な4つの対応点の中から基準マーカーとする点Mを選択する。そして、設定部232は、基準点Mまでの距離L0に所定の値を設定する。作成部233は、基準点M以外の点、つまり基準マーカー以外のマーカーに対応する点1〜点3までの各距離L1,L2,L3を表す数式を作成する。導出部234は、設定部232により設定された基準マーカーで採用する全ての符号パターンを導出する。棄却部235は、導出部234により導出された符号パターンの中から、距離L1、L2、L3の値の少なくとも1つが相応しい値となり得えない符号パターンを棄却する。
(もっと読む)
測定装置、位置測定システム、測定方法、較正方法及びプログラム
【課題】光を用いて物体までの距離を測定した測定結果において、所定の対象物に関する測定結果を特定することを可能とすること。
【解決手段】物体までの距離を光の照射によって測定点毎に測定する測定装置であって、測定点毎の距離情報と測定点毎の受光量情報とを取得する光学式距離測定部と、受光量情報において、光量が閾値を超える複数の測定点の並びが所定のパターンを形成している場合に、これらの測定点を、光源方向に対して多くの入射光を反射する反射面を有する対象物に対応する測定点であると判定する対象判定部と、判定された測定点の距離に基づいて、対象物の位置を測定する位置測定部と、対象判定ステップによって判定された測定点の距離に基づいて、自装置の基準点を原点とするローカル座標系における対象物の位置を算出し、同一の対象物のローカル座標系における位置及びグローバル座標系における位置に基づいて較正を行う較正部とを備える。
(もっと読む)
車輪形状校正冶具、車輪形状校正冶具を用いた校正方法
【課題】校正作業のバラツキを最小限にとどめ、車輪の所定の計測項目を計測する際の計測データの信頼性を向上させることができる車輪形状校正冶具、車輪形状校正冶具を用いた校正方法を提供する。
【解決手段】車輪形状校正冶具10は、光切断法によるレーザ線条光が照射され、所定の計測項目が計測される未使用時の車輪における計測部位と同一寸法であって、かつ、その寸法が既知である計測部位を有する校正冶具本体11と、レール2に対し平行面上において、校正冶具本体11を回転させ、レール2に対し任意のアタック角を設定する回転ステージ12と、レール2に対し平行面上において、校正冶具本体11を前後左右に移動させるX,Y方向移動ステージ13,14と、校正冶具本体11等を搭載し、レール2上に設置される架台15と、を有する。
(もっと読む)
画像計測装置、画像計測方法及びコンピュータプログラム
【課題】注目点の選定や注目点を追尾することが困難な複雑な形状の計測対象物であっても、また時間の経過とともに移動する計測対象物であっても、正確なキャリブレーションを実行することができ、所望の物理量を正確に計測することができる画像計測装置、画像計測方法、及びコンピュータプログラムを提供する。
【解決手段】フレーム画像をコマ送り再生表示し、コマ送り再生表示されたフレーム画像から、複数のフレーム画像の選択を受け付ける。選択を受け付けたフレーム画像を重ね合わせた合成画像を生成する。生成した合成画像を表示し、表示した合成画像上で所定の物理量を計測する。また、寸法が既知である球を計測対象物と同一の動画像に写り込むように配置し、計測対象物と球とを撮像して取得した動画像に基づいてキャリブレーションを実行する。
(もっと読む)
レーザ画像計測装置
【課題】環境変化に左右されない正確な測距値を取得可能なレーザ画像計測装置を得る。
【解決手段】レーザ光の発振時間と反射光の受光時間との時間差に基づき対象物までの距離を導出するために、基準となる変調信号Mを生成する基準信号発生部20と、変調信号Mにより変調されたレーザ光を出射するレーザ光送信部30と、レーザ光を走査して整形された送信ビームLを出射するレーザ光走査部40と、反射光を受信信号に変換する受信部50と、レーザ光走査部40内のレーザ光走査光学系5から基準固定距離に設置されて送信ビームLが照射される基準反射板6と、受信信号から基準反射板6および対象物の距離値Dzを導出する信号処理部60と、を備える。レーザ光走査部40および受信部50は、基準反射板6からの反射光を、対象物に対する距離測定と同一の光路で送受信する。信号処理部60は、基準反射板6の距離変動量ΔDzから、対象物の距離値を補正する。
(もっと読む)
レーザ測定装置
【課題】検出エリア内におけるレーザ光の実際の照射高さを容易に計測し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置100は、レーザレーダ装置1と検出用基準物体90とを備えている。検出用基準物体90の反射部は、所定の高さ方向における各位置が高さに応じた構造をなし、且つレーザ光L1が入射したときに、当該レーザ光L1が入射する高さに応じた内容の特定反射光を発するように構成されている。一方、レーザレーダ装置1は、回動反射機構40から照射されるレーザ光L1の走査エリア上に検出用基準物体90が配置されたときにこの検出用基準物体90からの特定反射光を検出している。そして、反射光の状態と高さ情報とを対応付ける対応データを参照して特定反射光の状態に対応する高さ情報を求め、検出用基準物体90におけるレーザ光の照射高さを計測している。
(もっと読む)
三次元形状測定装置、三次元形状測定方法及びコンピュータプログラム
【課題】少ない投影パターン数で、形状変化が急激な計測対象や不連続な計測対象の高精度な形状計測を可能とする。
【解決手段】三次元形状計測装置は、明るさ変化を有するパターンを計測空間に投影するパターン投影手段と、パターンが投影された計測空間を撮影する撮像手段とを備え、計測空間に存在する計測対象の三次元形状を計測する三次元形状計測装置であって、撮影手段により得られた撮影画像のパターンの明るさ変化からパターンの局所的な配置情報を算出する局所配置情報算出手段と、撮影画像におけるパターンのボケ量を算出するボケ量算出手段と、局所配置情報とボケ量とに基づき、計測対象の三次元形状を算出する三次元形状算出手段とをさらに備える。
(もっと読む)
位置判定システムおよび移動体
【課題】 移動体を有するシステムにおいて、移動体の揺れによる影響を受けずに正確な走行位置判定を可能とすること。
【解決手段】 一実施形態における位置判定システムは、走行路と、この走行路を走行する移動体と、複数の位置ブロック31と、ブロック検出手段と、位置判定手段と、を備える。位置ブロック31は、走行路の複数の領域において、移動体の走行方向に沿って各領域で予め定められた数だけ配置される。ブロック検出手段は、移動体に設けられ、移動体の走行時に位置ブロック31を検出する。位置判定手段は、各領域を移動体が通過する際にブロック検出手段が検出した位置ブロック31の数に基づいて移動体の位置を判定する。
(もっと読む)
脳磁場測定装置の校正方法および校正装置
【課題】モーションキャプチャ装置の座標系を簡便且つ正確に校正する。
【解決手段】下記の工程を含むことを特徴とする校正方法。
1.校正装置をデュワヘルメットの測定対象物挿入穴に配置する工程。2.校正装置を構成する各校正用コイルに通電し、デュワヘルメットの測定対象物挿入穴における各校正コイルの位置を算出する工程。3.カメラ及びモーションキャプチャ制御PCで構成されるモーションキャプチャ装置にて、各校正用コイル18の位置を算出する工程。4.工程2にて算出したデュワヘルメットの測定対象物挿入穴における各校正用コイルの位置座標をモーションキャプチャ装置にて算出された校正用コイルの位置として用いてモーションキャプチャ装置の校正を行う。
(もっと読む)
81 - 100 / 810
[ Back to top ]