
Fターム[2F065FF61]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 標準物の利用 (810)
Fターム[2F065FF61]に分類される特許
41 - 60 / 810
長尺材の測長方法及び装置
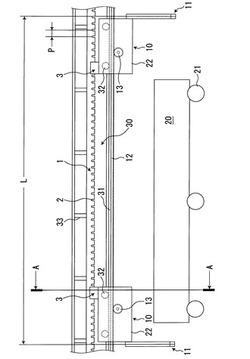
【課題】エンコーダの機械的不具合による測長異常をその場で検出し、大量の長さ不適合の発生を防止する。
【解決手段】透光する目盛2を付した定規1をラックレール12沿いに架設し、且つ定規1の目盛位置を測定する目盛位置測定器3を鋼管20長さ方向の一端側と他端側の各台車22に搭載しておき、一端側と他端側とでそれぞれ、台車22の移動の間、目盛位置測定器3による測定値とエンコーダによる測定値とを逐次比較し、両者の差が閾値超となったことを測長異常と同定する。
(もっと読む)
ラインセンサカメラのキャリブレーション装置およびキャリブレーション方法

【課題】カメラパラメータを用いることなく簡単に高精度の「pixel→高さ」換算式を求めることを可能とする。
【解決手段】長方形状に形成されその表面に白色領域1wと黒色領域1bとを交互に配されてなるキャリブレーション用機材1と、キャリブレーション用機材1の長手方向を撮影するように配設されたラインセンサカメラ2と、ラインセンサカメラ2から出力される画像信号に基づいてラインセンサカメラ2のキャリブレーションを行う処理用コンピュータ3とを備え、白色領域1wと黒色領域1bの幅がそれぞれ同一幅であるとともに白色領域1wと黒色領域1bとの境界線がキャリブレーション用機材1本体の長手方向に対して所定の角度θだけ傾斜するように構成した。
(もっと読む)
走行車両のタイヤの変形状態を検出する検出装置および検出方法
【課題】簡単な構成で、効率よく正確に、走行車両のタイヤの変形状態を検出することが可能な、検出装置および検出方法を提供する。
【解決手段】走行車両5のタイヤ6の変形状態を検出する検出装置1は、撮像手段2と、記憶手段3と、判定手段4とを備える。撮像手段2は、走行車両5に搭載され、検出エリアPにおいて路面8に設けられた所定パターン7の画像を撮像するものである。記憶手段3には、タイヤ6の変形前に、検出エリアPにおいて撮像手段2によって予め撮像された所定パターン7の画像が基準画像として記憶されている。判定手段4は、検出エリアPにおいて撮像された画像と、記憶手段3に記憶された基準画像とを比較し、当該2つの画像における所定パターン7の変化に基づいて、タイヤ6の変形状態を判定する。
(もっと読む)
グリーンシートの膜厚測定装置
【課題】誤差を抑制して測定の精度を向上することができるグリーンシートの膜厚測定装置を提供すること。
【解決手段】膜厚測定装置1は、光源51及び光源51から発せられた光を測定領域Aに向けてライン状に出射する投光ロッド52を有するライン光照明5と、測定領域Aを挟んで投光ロッド52と対向するように配置されたラインカメラ6と、を備えている。投光ロッド52のライン状の光の出射範囲(出射口53)は、投光ロッド52の軸線方向に沿った長さが搬送部3により搬送されるグリーンシートGの軸線方向に沿った長さよりも長い。投光ロッド52と測定領域Aとの間には、投光ロッド52から出射された光のうち、測定領域Aに搬送されたグリーンシートGの軸線方向での端の外側を通って、ラインカメラ6に入射する光を遮光する遮光部材7が設けられている。
(もっと読む)
曲率半径測定機の被測定体保持位置補正方法および曲率半径測定機
【課題】曲率半径測定機の被測定体保持位置補正方法において、曲率半径測定機に発生する被測定体保持位置のずれを精度よく迅速に補正することができるようにする。
【解決手段】曲率半径測定機の被測定体保持位置補正方法であって、保持工程と、校正用光学部材の校正面の面頂を測定光束の集光位置に位置合わせし、位置合わせ後の干渉縞画像に基づく干渉縞画像情報を記憶する基準調整工程(ステップS3)と、この位置を基準位置として、基準位置から位置ずれ測定位置に被測定体を相対移動して干渉縞画像を記憶する位置移動工程と、各位置での干渉縞画像に基づいて干渉計の光軸に対する位置ずれ量を測定する位置ずれ算出工程(ステップS6、S13)と、この位置ずれ量に基づいて、位置補正量を算出する位置補正工程(ステップS15)と、を備え、被測定面の曲率半径の測定を行う際に、位置補正量に基づいて保持台の位置補正を行う。
(もっと読む)
エンコーダ及び校正方法
【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
測定装置
【課題】被測定面の形状を高精度に測定することができる技術を提供する。
【解決手段】被測定面の形状を測定する測定装置であって、前記被測定面に接触する接触部材を含むプローブを保持するプローブハウジングと、前記被測定面に対する位置及び姿勢が固定され、前記被測定面の形状を測定するための基準となる基準ミラーと、前記基準ミラーと前記プローブとの間の第1距離を測定する第1距離測定部と、前記プローブハウジングと前記プローブとの間の第2距離を測定する第2距離測定部と、前記第2距離測定部で測定される前記第2距離が一定距離となるように前記プローブハウジングを駆動させながら前記第1距離測定部で測定される前記第1距離から前記接触部材の位置を特定し、当該接触部材の位置に基づいて前記被測定面の形状を算出する処理部と、を有する。
(もっと読む)
形状計測装置及び形状計測方法
【課題】二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測装置及び形状計測方法を提供する。
【解決手段】本発明の形状計測装置100は、物体を照射する第1の光源20と、物体を照射する第2の光源30と、物体を撮像するための複数の画素を有するカメラ10と、第1の光源20及び第2の光源30の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを予め保持するメモリ70と、物体を撮像して得られるそれぞれの画像信号の画素毎の輝度比を算出し、該輝度比の値から画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元座標を決定する制御ユニット50とを備える。
(もっと読む)
厚さ測定装置、及び厚さ測定方法
【課題】距離検出器の設定位置に変位があっても、短時間で、測定誤差の補正が可能な厚さ測定装置、及び厚さ測定方法を提供することを目的とする。
【解決手段】基準厚さを有する第1の厚さ部と第2の厚さ部を備える校正板3と、検出部1を移動させる移動機構部2と、検出部を予め定める一定長さの「校正位置」、及び予め定められる「測定位置」に、移動を指令する位置設定部4と、を備え、位置設定部は、「校正」指令を移動機構部に送り、検出部を「測定位置」から「校正位置」に移動させ、予め設定された第1の厚さ部と第2の厚さ部との校正位置信号を厚さ演算部5に送り、厚さ演算部は、第1の厚さ部及び第2の厚さ部の厚さを求め、夫々の基準厚さとの差を求めて、「測定位置」で求めた厚さを補正し、厚さ校正板を固定し、検出部を移動させて、予め設定された第1及び第2の距離検出器の設定位置の変位による測定誤差を補正するようにしたことを特徴とする。
(もっと読む)
開口建具の設置スペースのサイズを求める方法
【課題】人的コストを節約可能であり、測定の利便性を向上可能な開口建具の設置スペースのサイズを求める方法を提供する。
【解決手段】開口建具、すなわちドア又は窓の設置スペースのサイズを求める方法は、少なくとも1つの辺縁を有するドア(窓)設置スペースを提供するステップ(a)と、ドア(窓)設置スペースの一辺に寸法校正部材を設置するステップ(b)と、影像キャプチャ装置を利用し、ドア(窓)設置スペースおよび寸法校正部材を含む影像を取得するステップ(c)と、影像を影像測定システムへ伝送するステップ(d)と、影像測定システムを利用して影像を分析し、ドア(窓)設置スペースと寸法校正部材との比例関係を取り、影像の比例関係と寸法校正部材の実際の寸法とに基づき、ドア(窓)設置スペースの実際の寸法を算出するステップ(e)と、を含む。これにより、人的コストを節約可能であり、測定の利便性を向上可能である。
(もっと読む)
ステレオカメラ較正装置およびステレオカメラ較正方法
【課題】マーカを設置するための較正用ポールの本数を少なくする。
【解決手段】回転可能であり、回転角の調整によって電子カメラによる第1、第2マーカの撮影を可能とする可動ミラーと、可動ミラーの回転角を取得する回転角取得装置12と、電子カメラの撮像面に対する第1、第2マーカの投影点の位置を検出する投影点検出装置13と、電子カメラのカメラ要素の相対的な位置関係、可動ミラーの回転中心軸の位置および第1、第2マーカの位置を記憶する記憶部15と、カメラ要素の相対的な位置関係、回転中心軸の位置、第1、第2マーカの位置、可動ミラーの回転角および第1、第2マーカの投影点の位置から電子カメラの位置および向きを算出するカメラ位置算出部18とを設ける。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
基板処理装置に用いられるプロセスモニター装置、プロセスモニター方法、および基板処理装置
【課題】光学的手法を用いて被処理基板の構造をより高精度に評価することができるプロセスモニター装置を提供する。
【解決手段】プロセスモニター装置11は、光を出射する光源部と、光の強度を検知可能な光検知部と、光源部から出射された光をウェハWまで導き、ウェハWから反射した反射波を光検知部まで導く第一光経路21と、第一光経路21と同等の光伝搬特性を有するように構成され、光源部から出射された光を、ウェハWを経由することなく光検知部まで導く第二光経路と、第二光経路を通して光検知部により検知された光の強度情報に基づいて、第一光経路21を通して光検知部により検知された光の強度情報を補正し、ウェハWの構造を解析するコントローラ17とを備える。
(もっと読む)
変位・ひずみ分布計測光学系と計測手法
【課題】安価で小型の変位・ひずみ分布計測光学系と計測手段を提供すること。
【解決手段】複数の撮像素子を使用することで、光学素子の数を減らし、2次元の変位・ひずみ分布計測を行うことができる装置を小型にすることができる。さらに、計測対象物の近傍に鏡を設置することにより、撮像素子の数を減らし、さらに小型の装置とすることができる。
(もっと読む)
計測装置、欠陥検査装置及び計測方法
【課題】全体形状と局所的形状とを両方とも精度良く計測する。
【解決手段】プロジェクタ1は物体M上に映像を投影する。撮像装置2はプロジェクタ1によって物体M上に投影された映像を、プロジェクタ1とは異なる角度から撮像する。ステージ3及びステージ駆動装置4は、物体Mとプロジェクタ1及び撮像装置2との間の所定方向の相対走査を実行する。記憶部6には、ステージ3及びステージ駆動装置4による相対走査を実行しつつ、プロジェクタ1によりY軸方向に延びるスリット像を基準となる物体M上に投影させたときに撮像装置2によって撮像される動画像も記憶されている。制御部9は、ステージ3及びステージ駆動装置4による相対走査を実行しつつプロジェクタ1により記憶部6に記憶された動画像を計測対象の物体M上に投影させるとともに、撮像装置2により物体M上に投影された動画像を撮像させる。
(もっと読む)
シート材の欠陥検査方法、及びそれに用いる検査用治具
【課題】表面に微細な凹凸形状等の地合パターンを有するシート材の欠陥を、迅速かつ再現性良く検査する方法を提供する。
【解決手段】焦点調整用シート材を欠陥検査位置に載置し、カメラの焦点を合わせる第1のフォーカス工程、前記焦点調整用シート材から当該カメラの焦点をずらすように調整する第1のデフォーカス工程、第1のフォーカス工程における焦点位置Aから第1のデフォーカス工程における焦点位置Bまでの距離dを計測及び記録する工程、被検査シート材を第1のフォーカス工程と同一又は異なる欠陥検査位置に載置し、その地合パターンにカメラの焦点を合わせる第2のフォーカス工程、及び当該カメラの焦点を、第2のフォーカス工程における焦点位置A’から、前記距離d分ずらした焦点位置B’に合わせる第2のデフォーカス工程、及び焦点位置B’に焦点を合わせたカメラで被検査シート材の欠陥を検査する工程、を含むことを特徴とする欠陥検査方法。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
3次元計測方法
【課題】平面精度が低い基板上に生成された、直径数十ミクロン程度のサイズのバンプの3次元計測を可能とする。
【解決手段】測定対象に固有の傾斜角で固有の色相光を投光し、固有の傾斜角で傾斜した視軸のカラーラインセンサカメラで撮像し、得られた画像画素の色相光反射強度基準化比率から、測定対象の表面パッチ傾斜角を算出し、表面パッチ傾斜角から表面パッチの高さを算出する3次元計測法において、まず光拡散表面を有する球状モデルを対象として、色相光反射強度基準化比率と表面傾斜角の対応表を作成し、未知の測定対象を撮像した画像画素の色相光反射強度基準化比率から表面パッチの傾斜角を算出し、傾斜角から表面パッチの高さを算出し、これをスキャン方向に沿って加算して縦断面高さデータを算出し、縦断面高さデータを対象横幅に亘って集積して、未知の測定対象の3次元計測を行う。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】撮像部の姿勢の容易な調整を可能とする。
【解決手段】ワークの搬送路の少なくとも一部を撮像視野に含むように配置された撮像部110から、撮像によって得られた撮像画像を受理する画像処理装置であって、搬送路上に置かれた目標物を、撮像部110が撮像することによって取得された撮像画像を受理する画像受理手段と、受理された撮像画像における目標物の位置を取得する位置取得手段と、位置取得手段によって取得された目標物の撮像画像における位置を用いて、撮像部110の撮像視野を含む面の、目標物が置かれた面に対する傾き度を取得する傾き取得手段と、取得される傾き度を用いて、撮像部110の姿勢調整を支援するための支援情報を出力する出力手段と、を備える。
(もっと読む)
計測装置
【課題】被加工物の研削時におけるノイズ信号による誤判定を防止し、被加工物の厚みまたは上面高さ位置を正確に計測することができる計測装置を提供する。
【解決手段】被加工物保持手段に保持された被加工物の上面で反射した反射光と光路長が一定の基準反射光に基づいて被加工物の厚み方向における上面までの2点間の距離を計測する計測装置であって、被加工物の上面で反射した反射光と光路長が一定の基準反射光を受光したイメージセンサーからの検出信号に基づいて分光干渉波形を求め、この分光干渉波形と理論上の波形関数に基づいて波形解析を実行し、被加工物の上面で反射した反射光の光路長と基準反射光の光路長との光路長差に対応して出力される信号強度における現在出力された値と前に出力された値との絶対値の差を求め、この絶対値の差を各光路長差毎の信号強度における現在出力された値に加算し、加算された値が最も高い光路長差を被加工物の厚み方向における上面までの2点間の距離として決定する。
(もっと読む)
41 - 60 / 810
[ Back to top ]