
Fターム[2F065FF61]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 標準物の利用 (810)
Fターム[2F065FF61]に分類される特許
141 - 160 / 810
3次元形状測定装置及び3次元形状測定方法
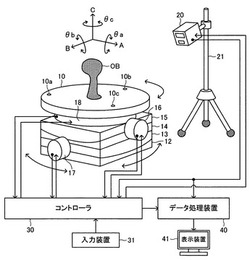
【課題】 ステージを回転軸周りに回転させながら3次元形状測定を行う場合に、3次元カメラの位置を異ならせても効率の悪化を防ぐ。
【解決手段】 コントローラ30は、第1のカメラ位置に配置した3次元カメラ20の測定により取得したステージ10の定点の座標又はベクトルの成分を記憶しておく。コントローラ30は、第1のカメラ位置と異なる第2のカメラ位置に配置した3次元カメラ20の測定により取得したステージ10の定点の座標又はベクトルの成分と、前記記憶しておいたステージ10の定点の座標又はベクトルの成分とを用いて、第2のカメラ位置で3次元カメラ20により測定した3次元形状を表す3次元データを、第1のカメラ位置で3次元カメラ20により測定した3次元形状を表す3次元データに座標変換するためのカメラ座標変換係数を取得する。
(もっと読む)
光学装置

【課題】折り返し平面鏡の変形によって生じる被検光学系の透過波面を繋ぎ合わせるときの誤差を低減させた光学装置を提供する。
【解決手段】被検光学系T1の被測定領域よりも小口径の折り返し平面鏡F1を挟んで、被検光学系T1の透過波面を測定する第1の干渉計I1と対向するように第2の干渉計I2を設ける。そして、第2の干渉計I2は、測定光を照射し、折り返し平面鏡F1の表面に形成された鏡面S1で反射され、再び第2の干渉計I2に戻ってきた戻り光を基に、第2の干渉縞画像を取得する。解析装置11は、第2の干渉計I2により取得された第2の干渉縞画像を解析して、折り返し平面鏡F1の鏡面S1の変形量を測定し、折り返し平面鏡F1の変形によって生じた誤差を打ち消すように透過波面の補正を行う。
(もっと読む)
形状計測装置及び形状計測方法
【課題】計測対象の形状を高速に計測可能な小型化された形状計測装置及びその計測形状方法を提供する。
【解決手段】本発明の形状計測装置は、格子模様を投影するための一列に並んだ3以上の光源と、投影用光を通過させて格子模様を形成する格子模様プレートとを有する投影装置と、格子模様が投影される基準面を有する基準平板と、基準平板を該基準平板の法線方向に所定量ずつ平行移動させる移動ステージと、所定の数の光源の各々に対して、投影装置により基準面に投影された格子模様の基準用画像と、計測対象に投影された格子模様の計測用画像とを撮影する撮影装置と、撮影された基準用画像の各画素に対して、格子模様の位相と空間座標とを1対1に対応づけるテーブルを作成するとともに、該テーブルと計測用画像とから計測対象の空間座標を求めることにより計測対象の形状を決定する解析装置とを備える。
(もっと読む)
位置計測装置及び方法、露光装置並びにデバイス製造方法
【課題】アライメントマークの位置を計測する時間の短さの点で有利な位置計測装置の提供。
【解決手段】位置計測装置の制御部は、撮像系のテレセントリシティに関する情報を予め記憶し、基板に形成された複数のアライメントマークのうち少なくとも1つに関して、ステージの位置制御により撮像系に対するフォーカス調整を行って撮像系に撮像を行わせ、撮像によるアライメントマークの信号に基づいてX−Y平面に平行な面における位置を求め、フォーカス調整のなされた少なくとも1つのアライメントマークに関して、基板表面の第1の位置を検出系に検出させ、他のアライメントマークに関して、フォーカス調整を行わずに、撮像系に撮像を行わせ、かつ基板表面の第2の位置を検出系に検出させ、撮像によるアライメントマークの信号と第1の位置と第2の位置とテレセントリシティに関する情報とに基づいて、X−Y平面に平行な面における位置を求める。
(もっと読む)
3次元形状計測方法、3次元形状計測装置、及びプログラム
【課題】1回のパターン投影、及び撮影により計測対象の3次元形状を復元する。
【解決手段】投影装置1は、所定の投影パターン(円形白黒コード群)を計測対象4に投影する。撮像装置2は、投影パターンが投影された計測対象4を撮影する。コード抽出部3−2は、撮影した画像からコードを抽出する。コード識別部3−3は、抽出したコードからコード番号を識別する。ワード生成部3−4は、着目コード番号の4近傍のコード番号を探索してワードを生成する。対応点算出部3−5は、生成されたワードを用いて、撮影画像中のワードと投影パターンのワードとの対応をとり、対応点の座標を得る。3次元位置算出部3−6は、3角測量の原理を用いて、撮影画像中のワードの中心座標と投影パターンの中心座標とから3次元座標位置を算出する。
(もっと読む)
形状計測装置およびキャリブレーション方法
【課題】計測点の位置の違いによる法線算出の誤差を可及的に小さくし、計測対象物の3次元形状を精度良く算出するための技術を提供する。
【解決手段】形状計測装置は、カメラ1で撮像を行うことにより得られた画像から、計測対象物4の表面上の複数の注目点について特徴量を算出し、記憶装置62に予め記憶されているデータを参照して特徴量の値から法線の向きを算出し、その算出結果から計測対象物4の表面の3次元形状を復元する。ここで、記憶装置62は、カメラ1の視野内に設定された複数の基準位置のそれぞれについて作成された複数のデータを記憶しており、注目点の位置に応じて参照するデータが切り替えられる。
(もっと読む)
視覚センサを有するマニピュレータのセンサキャリブレーション方法及びロボット制御システム
【課題】
視覚センサを持つマニピュレータのキャリブレーションをどこでも簡単に行うことができ、作業工数を大幅に削減でき、特別な治具が準備できない環境でも即座にキャリブレーションを行うことを可能とする。
【解決手段】
マニピュレータMの周囲に配置された治具Gの直線部上の点を複数の観測位置姿勢毎にレーザ変位センサLSによりそれぞれ検出する。次にリンクパラメータと、レーザ変位センサLSが検出した値から直線部上の検出点であるロボット座標系の座標を、観測位置姿勢毎にそれぞれ求める。検出点の2つを一組として複数の組からロボット座標系を基準とした直線部の単位方向ベクトルを複数算出する。算出した直線部の単位方向ベクトルと、ロボット座標系のベクトル変数で表される直線部の単位方向ベクトルから連立方程式を作り、最小二乗法により較正値を求める。
(もっと読む)
キャリブレーション方法
【課題】簡単な構成で正確に等距離に配置された3つの基準点を提供することが可能なキャリブレーション用マーカを用いるキャリブレーション方法を提供することを目的とする。
【解決手段】三角形のマーク(100)を用いて、車両に搭載されたカメラのパラメータの調整を行うことを特徴とするキャリブレーション方法。三角形のマークは、両端部に接続構造を有する第1部材(110)と、第1部材と長手方向の長さが同じであって且つ両端部に接続構造を有する第2部材(120)と、第1部材と長手方向の長さが同じであって且つ両端部に接続構造を有する第3部材(130)を有し、第1部材、第2部材及び第3部材のそれぞれの接続構造を接続させることによって形成される。
(もっと読む)
反射面の形状測定方法及びシステム
【課題】本発明の目的は、低い装置コストのシステムにより、反射面及び特に、透明対象物に対して信頼性の高い形状測定が可能となり、システムの較正及び形状測定が特に処理しやすくなる選択肢を提案することにある。
【解決手段】本発明は、反射面(14)で反射されるパターン(15)を有するパターンキャリア(2)と、反射面(14)に反射されたパターン(15)を画素ごとに視認するカメラ(1)とを有するシステムを較正する方法に関する。カメラ(1)とパターン(15)との位置及び向き、並びにカメラ(1)の画素(8)ごとの視認方向を較正するため、面積の広い2枚の平坦なミラー面(5、6)が平行な構成で用いられ、ミラー面(5、6)が液体によって生成される。
(もっと読む)
電気機器の製造方法およびそれに用いられるターゲット設置用治具
【課題】電気機器を構成する構造物を精度良く3次元測定することにより、電気機器の組立を簡易にする。
【解決手段】構造部品の外形の寸法基準となる複数の位置にターゲットを設置する工程(S102)と、ターゲットの位置を画像解析することにより構造部品の形成寸法を3次元測定する工程(S103)とを備えている。また、構造部品の形成寸法の3次元測定結果に基づいて付設部品を形成する工程(S104)と、構造部品に付設部品を取付ける工程(S106)とを備えている。ターゲットを設置する工程(S102)は、上記複数の位置のうちターゲットを直接設置することができない設置不能箇所について、構造部品にターゲット設置用治具を取付けることにより上記設置不能箇所に対応した位置にターゲットを設置する工程を含む。
(もっと読む)
表面の干渉分析のための方法およびシステムならびに関連する応用例
【課題】表面の干渉分析の方法とシステムを提供する。
【解決手段】物体の空間的特性を決定するための方法には、2つ以上の界面を含む測定物体からの走査低コヒーレンス干渉信号を得ることが含まれる。走査低コヒーレンス干渉信号には、2つ以上の重なり合う低コヒーレンス干渉信号(それぞれ個々の界面に起因する)が含まれる。低コヒーレンス干渉信号に基づいて、少なくとも1つの界面の空間的特性が決定される。場合によって、決定は、低コヒーレンス干渉信号のサブセットに基づき、信号の全体に基づくのではない。あるいはまたは加えて、決定は、低コヒーレンス干渉信号を得るために用いられる干渉計の機器応答を示す場合があるテンプレートに基づくことができる。
(もっと読む)
カメラ校正装置
【課題】校正用撮像対象物を従来のものより小型化しても精度が高いカメラ校正を行うことができるカメラ校正装置を提供する。
【解決手段】イメージセンサ140を有するカメラ120と、イメージセンサ140と既知の位置関係にある加速度センサ150と、少なくとも2点の特徴点を有する校正用撮像物がカメラ120によって撮像された撮像画像と加速度センサ150によって検知された傾きとに基づいて、カメラ120の撮像位置および撮像方向を算出するカメラ校正部160とを備える。
(もっと読む)
移動体とその旋回半径算出方法
【課題】取付けられる搬送台車によって旋回半径が異なっても、目標地点に到達可能な移動体と搬送台車が取付けられた状態の移動体の旋回半径算出方法を提供する。
【解決手段】搬送台車19が固定される台車取付部20及び駆動車輪12を備え、その場旋回が可能な車両本体11と、車両本体11に装着され、車両本体11から視認できる外環境を撮像するカメラ22と、カメラ22を介して得られる画像中での、車両本体11の旋回前後の特定の被写体の位置から車両本体11の旋回角度θを検知する旋回角度検出手段35と、搬送台車19を固定した車両本体11が旋回角度θ旋回した際のカメラ22の移動距離Dを旋回角度θで除算して、搬送台車19を固定した車両本体11の旋回半径Rを算出する旋回半径算出手段33とを有する。
(もっと読む)
三次元形状計測装置および三次元形状計測装置のキャリブレーション方法
【課題】三次元形状計測におけるキャリブレーションを効率的に且つ高精度に行う。
【解決手段】ガラス材で構成され、上面、内層面、底面に、光源部11からスリット光が
照射されたときに輝線を映すパターンが形成されたキャリブレーション用ブロックと、複
数の特徴点を有する二次元パターンの撮像画像に基づいて、カメラパラメーターを計算す
るカメラパラメーター計算部22と、上面、内層面、底面に形成されたパターン上の輝線
の画像から特徴点を検出して二次元座標値を計算し、この二次元座標値とキャリブレーシ
ョン用ブロックの寸法データとに基づいて特徴点の三次元座標値を計算し、スリット光の
広がりを示す平面を表す式の係数を計算するスリット光平面計算部24と、カメラパラメ
ーターと平面を表す式の係数とに基づいて、二次元座標値から三次元座標値に変換するた
めの座標系変換係数を計算する三次元座標計算部25とを備えた。
(もっと読む)
基準パターン情報生成装置、方法、プログラムおよび一般車両位置特定装置
【課題】環境に応じて表示内容が変動する表示媒体を基準にして車両の位置を特定する技術の提供。
【解決手段】環境に応じて表示内容が変動する表示媒体を含む基準車両の周囲の風景を撮影した撮影画像から基準となる基準画像特徴点を抽出し、前記基準車両の周囲の風景を撮影した時点での前記基準車両の位置を基準位置として取得し、前記基準車両の風景を撮影した時点での前記基準車両の周囲の環境を基準車両環境として取得し、前記基準画像特徴点の前記撮影画像上での位置を示す基準パターン情報に対して、前記基準位置を示す情報と、前記基準車両環境を示す情報とを対応付けて所定の記録媒体に記録する。
(もっと読む)
帯状金属材料の表面に被覆された皮膜の膜厚測定方法および校正板
【課題】長波長タイプの赤外線膜厚計を用いて化成処理皮膜の膜厚のオンライン計測する際に、装置コンディションの経時変化に伴う膜厚測定値の初期状態からのずれを精度良く校正する。
【解決手段】下記(1)式で定義されるRa比率が0.7〜4.0となるように表面粗さが調整された機械的粗面化表面を有するステンレス鋼板を校正板として使用する。
Ra比率=Ra[基材]/Ra[校正板] …(1)
ただし、
Ra[基材]; 前記基材(皮膜を持たないもの)の算術平均粗さRa(μm)
Ra[校正板]; 校正板の算術平均粗さRa(μm)
(もっと読む)
距離画像カメラを用いた物体寸法測定方法および物体寸法測定装置
【課題】距離画像カメラを配置するだけで、カメラの解像度を超える寸法測定精度を実現可能な物体寸法測定方法および物体寸法測定装置を提供する。
【解決手段】載置面に何も載置されていない状態で撮像して第1距離画像を取得する第1撮像工程と、前記第1距離画像に基づいて前記載置面の方程式を算出する載置面方程式算出工程と、前記載置面に載置された直方体の少なくとも上面が写るように撮像して第2距離画像を取得する第2撮像工程と、前記第2距離画像に基づいて前記上面の方程式を算出する上面方程式算出工程と、この上面方程式算出工程で方程式が算出された前記上面を前記第2距離画像の中で前記載置面に射影し、前記載置面を回転させながら前記上面の射影の横軸方向および縦軸方向の各範囲幅の合計値をそれぞれ算出して、最小となった回転角度での合計値を前記上面の隣接する2辺の寸法の合計値として算出する寸法算出工程とを含む。
(もっと読む)
パターン寸法測定方法
【課題】フォトマスクのパターン寸法をパターン形状が次世代フォトマスクのように複雑な形状であっても精度良く測定することのできるパターン寸法測定方法を提供する。
【解決手段】フォトマスクのパターンを撮像してパターン寸法を測定する際に、パターン画像の画素数をパターン寸法に変換するパターン寸法変換式をテストパターンの寸法計測値とテストパターン画像の画素数とから求めておき、パターン画像の画素数をパターン寸法変換式によりパターン寸法に変換してフォトマスクのパターン寸法を測定する。
(もっと読む)
ハードディスクメディアの検査装置及び検査方法
【課題】本発明は、分光反射強度に含まれる迷光成分を低減し、パターンドディスク表面のパターン形状を精度よくまたはパターン欠陥を確実に検出できるハードディスクメディアの検査装置または検査方法を提供することである。
【解決手段】本発明は、パターンが形成されたハードディスクメディアの表面に複数の波長を含む光を照射し、波長毎に検出される反射光の強度を前記ハードディスクメディアからの反射光を検出する検出器に発生する迷光成分の強度で補正し、前記補正された反射光の強度から分光反射率を算出することを第1の特徴とする。前記補正は、前記ハードディスクメディアからの反射光の強度を前記反射光の短波長領域をカットした状態とカットしない状態で波長毎に検出し、両者の前記反射光の強度との差に基づいて行なうことを第2の特徴とする
(もっと読む)
接触角計
【課題】液滴の平面視輪郭形状をより簡便な方法で接触角と共に測定可能な接触角計を提供する。
【解決手段】本発明に係る接触角計1は、試料2が載置されるステージ20と、試料2上の液滴4を側方から撮像して液滴4の接触角を測定する第1撮像装置30と、試料2上の液滴4を上方から撮像して液滴4の平面視輪郭形状を測定する第2撮像装置40と、を備えている。
(もっと読む)
141 - 160 / 810
[ Back to top ]