
Fターム[2F065FF65]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 角度 (528)
Fターム[2F065FF65]の下位に属するFターム
回転量 (157)
Fターム[2F065FF65]に分類される特許
361 - 371 / 371
モデル形成装置及びモデル形成方法

【課題】 既に取得されている対象物の三次元的なモデルデータを出発点として、対象物の三次元モデルを簡易で効率良く形成できるモデル形成装置を提供すること。
【解決手段】 対象物10を撮影する撮影部110と、対象物の三次元モデルデータを記憶する画像データ記憶部130と、対象物10の三次元モデルデータに基づき三次元モデルを表示する表示部140と、画像データ記憶部130で記憶された三次元モデルデータに基づき、対象物10のモデル未形成部分を認識する認識部150と、前記モデル未形成部分の撮影に関係する撮影指示情報を求める撮影指示情報部160とを備え、撮影指示情報部160で求めた撮影指示情報に準拠して、撮影部110による対象物10の撮影が行なわれる。
(もっと読む)
移動作業機の位置検出装置

【課題】 多種の作業に対応できる移動作業機の位置検出装置を提供する。
【解決手段】 移動作業機1の作業領域A0の全域を外部から撮影する撮影手段64と、この撮影手段64からの画像に画像処理を施す画像処理手段66とを備えて、作業領域A0における移動作業機1の絶対位置を計測するように構成した。
(もっと読む)
表面欠陥検査装置
【課題】分解能を落とすことなく画素のムダを最小限に抑えることができる表面欠陥検査装置を提供すること。
【解決手段】円筒表面等の局所的な凹凸部の検査測定において、被対象の稜線部を透過光にて観察する観察手段と、前記被対象と観察手段を相対的に移動する移動手段とを持ち、前記観察手段は照明手段と受光手段から成り、前記受光手段には稜線位置に焦点を合わせた結象光学手段を持つ1次元ラインセンサを用い、前記ラインセンサ配置を被対象稜線方向から傾けて配置することを特徴とする。
(もっと読む)
画像生成方法及び装置
【課題】 現実世界又はその映像に位置合わせされたCG画像を生成する画像生成方法において、任意の現実物体について、CG画像を重畳した状態としない状態とを観察者が容易に観察可能とすること。
【解決手段】 CGを重畳しないCGマスク領域を設定しておき、CGマスク領域に含まれる現実物体にはCGを重畳しないようにする。任意の現実物体について選択的にCGが重畳された状態と重畳されない状態とを観察することが可能になる。
(もっと読む)
3次元測量装置及び電子的記憶媒体
[課題] 本発明は、測量装置と撮像装置とにより3次元座標データを演算するための3次元測量装置等に係わり、特に、測量装置により対応点の位置を決定し、ステレオ表示が可能な3次元測量装置を提供することを目的とする。
[解決手段] 本発明は、測量装置により計測された少なくとも3点の基準点の位置と撮像装置による画像とから、撮像装置の傾き等を算出し、測量装置により計測された視準点の位置から、撮像装置の傾き等を算出し、視準点を対応点として撮像装置の画像のマッチングを行い、測量装置が測定した視準点の位置と、マッチングを行った画像にある視準点とを関連付け、その関連付けに基づき測定対象物の3次元座標データを演算することができる。
(もっと読む)
位置判定及びモーショントラッキング
プロセッサベースのシステム(301)において使用される位置判定及びモーショントラッキングのためのシステム及び方法。実施形態は、固定点(132)を中心として少なくとも1つの方向に動く方向転換器(130)と、サーチビーム(131)を位置ビーム(141)として反射する対象物(101)と、方向転換器の向きから少なくとも1つの角度位置を判定する論理回路(160)と、固定点(132)からの対象物の距離(104)を判定する論理回路(161)とを含む場合がある。  (もっと読む)
(もっと読む)
物体の状態を推定する推定システム、推定方法および推定プログラム
3次元モデル記憶手段(170)は、対象物体の3次元形状データおよび照明基底データを予め記憶する。比較画像生成手段(110)は、3次元形状データおよび照明基底データにもとづいて、入力画像と同じ照明条件の下で、現時点での推定値の位置/姿勢に対象物体がある再現画像を比較画像として生成する。画像変位分布検出手段(120)は、比較画像を部分画像(小領域)に分割し、小領域ごとに比較画像と入力画像との画像変位分布を検出する。姿勢差分検出手段(130)は、画像変位分布および3次元形状データにもとづいて位置姿勢差分値を算出する。そして、終了判定手段(140)は、位置姿勢差分値が所定の閾値より小さいと判断した場合に、現在の位置姿勢推定値を最適位置姿勢推定値(13)として出力する。これにより、画像に含まれる物体の位置や姿勢を高速に推定できるようになる。 (もっと読む)
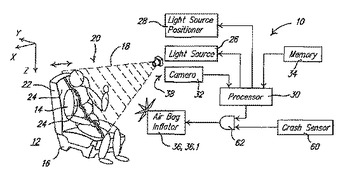
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
パイプ端部における内外部形状自動測定装置
パイプ(1)の端部における内部および外部プロファイルを自動的に測定する装置が説明され、ここでセンサー(11a、11b)は支持体(10)の各回転角度に対して対応するプロファイルの距離を測り、測定されるパイプの軸線(X−X)に平行な方向に滑動自在なスライド(13)に、回転自在に取付けられた支持体の回転軸高さを調整するための手段が設けられる。この測定システムはまた、測定されたパイプの端部に分類コードを帰すための検出されたデータの処理を備えている。 (もっと読む)
マイクロエレクトロニクスにおける寸法検査のための光学フーリエ変換の使用
本発明は、
-像焦点面における物体の基本的な表面の光学フーリエ変換像を形成する手段と、
-検出手段によって提供された情報から少なくとも1つの物体の寸法的および/または構造的な特徴に関連するデータを生成する処理手段と、
を含むことを特徴とする、物体の寸法的または構造的な特徴を測定するための装置に関する。 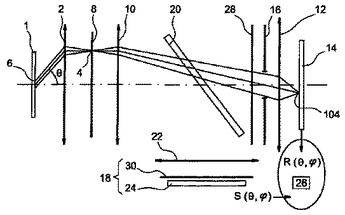 (もっと読む)
(もっと読む)
二次元測定対象物をピクセル毎に光電測定するための装置
【課題】 一般的なタイプの測定装置を、カラー測定に適するように改良すること。
【解決手段】 二次元の測定対象物をピクセル毎に光電測定するための装置は、測定対象物(M)を二次元CCDイメージセンサ22上に結像するための投影手段3,21と、イメージング光路に設けられ且つイメージセンサ上に衝突する測定光の波長選択フィルタリングを行なうフィルタ手段66と、イメージセンサによって形成された電気信号を処理するとともに、その電気信号を対応する生のデジタル測定データ71に変換する信号処理手段23と、生の測定データを、測定対象物の各画像要素の色を示す画像データ72に処理するためのデータ処理手段7とを有している。
(もっと読む)
361 - 371 / 371
[ Back to top ]