
Fターム[2F065FF66]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 角度 (528) | 回転量 (157)
Fターム[2F065FF66]に分類される特許
1 - 20 / 157
電子機器
無人走行体の遠隔操縦システム
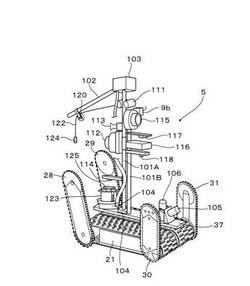
【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
3次元計測装置およびそれに用いられる照明装置

【課題】被計測物を精度よく計測することができる3次元計測装置およびそれに用いられる照明装置を提供する。
【解決手段】3次元計測装置1は、被計測物8に円偏光を照射する照明手段2と、照明手段2を移動させる移動手段3とを備える。また、3次元計測装置1は、被計測物8の被照射面からの反射光を受けて上記被照射面を撮像する撮像手段4と、撮像手段4で撮像された撮像画像を用いて反射光の偏光状態を検出し、被計測物8の被照射面の向きを求める演算手段5とをさらに備える。照明手段2は、円偏光を被計測物8の一部に照射する。移動手段3は、被計測物8において被照射面の位置が変わるように照明手段2を移動させる。
(もっと読む)
画像測定装置
【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
管端検査装置
【課題】管端部の加工部について、寸法精度と加工面の状態とを共に自動的に検査することができ、しかもインライン化が可能なよう検査装置全体のコンパクト化を可能にした、管端検査装置を提供する。
【解決手段】端部を加工した管2の管端加工部を検査する管端検査装置である。管端加工部の形状を計測するレーザ変位計42と、管端加工部の表面を撮影する撮像装置62と、レーザ変位計42及び撮像装置62を管端加工部の周方向に沿って移動させることにより、レーザ変位計42のレーザビームスポット及び撮像装置62の焦点を管端加工部の周方向に沿って周回させる回転テーブル(周回手段)と、を備える。
(もっと読む)
タイヤ厚み測定装置
【課題】内圧を負荷した状態でタイヤの厚みを計測可能なタイヤ厚み測定装置を提供する。
【解決手段】上側ハーフリム84でタイヤ30の一方のビード部を支持し、下側ハーフリム26で他方のビード部を支持し、タイヤ内を密閉して内圧をかける。内側レーザー変位計66から外側レーザー変位計122までの距離からタイヤ内空部に配置した内側レーザー変位計66で計測したタイヤ内面までの距離とタイヤ外側に配置した外側レーザー変位計122で計測したタイヤ外面までの距離とを引き算する。これにより、内圧を負荷した状態でタイヤの厚みを計測することが出来る。
(もっと読む)
回転式レーザー測定装置
【課題】コンクリート壁等測定対象面の状態(凹凸量)を装置により自動的に、かつ精度良く測定できるようにする。
【解決手段】回転式レーザー測定装置は、レーザー光によって距離を測定する距離センサと、該距離センサを軸方向に駆動する第1の駆動手段と、同距離センサを軸周り方向に駆動する第2の駆動手段と、これら第1,第2の駆動手段を駆動制御する駆動制御手段とを備え、上記距離センサを測定対象面の長手方向と直交する面に沿って回転可能に支持するとともに、上記測定対象面の長手方向に沿って所定ピッチ毎に移動可能とし、該所定ピッチ毎に上記距離センサを移動させ、かつ所定の角度回転させながら、測定対象面の状態を自動的に測定して行くようにした。このような構成によると、自動的かつ容易に、しかも正確に凹凸その他の表面状態を測定して行くことができるようになる。
(もっと読む)
円形状測定方法および装置
【課題】高価な専用装置を用いることなく、平面上の円形パターンをマルチステップ法により高精度に測定できる円形状測定方法および装置を提供する。
【解決手段】円形パターンを有する被測定物Wを載置するテーブル10、テーブルの回転機構20、画像プローブ30、画像プローブを移動させる移動機構40、制御装置50を有する円形状測定装置を準備する。画像プローブを円形パターンの円周に沿って移動させながら、円形パターンの円周を360°/mピッチで測定する工程と、円形パターンの中心を基準に360°/mだけテーブルを回転させて円形パターンの円周上の同一点を測定する測定動作を、360°/mずつテーブルを回転させながら合計m回行ってm個の測定データを取得する工程と、このm個の測定データから円形パターンの形状成分を求める工程を備える。
(もっと読む)
レーザ干渉測定装置の横座標校正治具および横座標校正方法
【課題】収束光学系を有するレーザ干渉測定装置における測定面上の位置の校正が簡便かつ高精度に行えるレーザ干渉測定装置の横座標校正治具および横座標校正方法を提供すること。
【解決手段】横座標校正治具10は、マーカを有する画像を投影する画像投影手段19と、画像投影手段19を第1回動軸線A1まわりに回動自在に支持しかつ第1回動軸線が所定の回動中心Cを通る第1支持機構11と、第1支持機構を第2回動軸線A2まわりに回動自在に支持しかつ第2回動軸線が回動中心Cで第1回動軸線A1と交叉する第2支持機構12と、を有する。
(もっと読む)
基板位置合わせ方法、基板位置合わせ装置、コンピュータプログラム、及びコンピュータ可読記憶媒体
【課題】周縁部に少なくとも2つの直線部が形成される略円形の基板を精度良く位置合わせすることが可能な基板位置合わせ方法を提供する。
【解決手段】周縁部に少なくとも2つの直線部が形成される概ね円形の基板を位置合わせする基板位置合わせ方法であって、基板を保持して回転する保持回転部により前記基板を自転させながら、前記基板の周縁部に向けて発せられた光を受光した受光部から信号を取得し、取得した信号の強度と前記基板の回転角度とを関連付ける工程と、前記信号の強度の変化に基づいて、前記2つの直線部に対応すべき2つの回転角度区間を検出する工程と、前記信号の強度に関連付けられた前記回転角度に基づいて、前記2つの回転角度区間の角度差を求める工程と、前記角度差が所定の範囲内に収まるか否かを判定する工程と、前記判定する工程において前記角度差が所定の範囲内に収まると判定された場合に、前記2つの回転角度区間が、対応する前記2つの直線部に相当すると決定する工程とを含む基板位置合わせ方法が提供される。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム
【課題】検出部を被検物に対して移動させて測定位置毎に停止させて測定する場合の測定速度を向上させることができる形状測定装置を提供する。
【解決手段】形状測定装置は、被検物に対しての相対位置が変更されて被検物の表面の形状を検出する検出部(20)と、検出部により検出された被検物の表面の形状の変位を示す情報に基づいて、被検物に対して検出部が相対的に静止しているか否かを判定する判定部(静止判定部58)と、判定部により検出部が相対的に静止していると判定された場合の形状に基づいて、被検物の表面の形状データを算出する算出部(座標算出部53)と、を備える。
(もっと読む)
3次元計測装置、および3次元計測方法
【課題】偏光解析を用いながら、複数の傾斜面の各傾斜方向の違いを識別できる3次元計測装置、および3次元計測方法を提供する。
【解決手段】3次元演算部4の傾斜算出部41は、ワーク台座6によってカメラ3の撮像方向とワークWの表面との相対角度を第1の状態に設定してカメラ3が生成した撮像データに基づいて、透過光L3の偏光状態を検出し、この検出した偏光状態に基づいて、ワークWの表面の第1の傾斜角および第1の方位角を求め、ワーク台座6によって相対角度を第1の状態から第2の状態に変化させた後にカメラ3が生成した撮像データに基づいて、透過光L3の偏光状態を検出し、この検出した偏光状態に基づいて、ワークWの表面の第2の傾斜角および第2の方位角を求め、傾斜補正部42は、第1の傾斜角と第2の傾斜角との差に基づいて、第1の傾斜角または第1の方位角を補正する。
(もっと読む)
三次元形状測定装置
【課題】被検物の一部に単位距離あたりの形状変化が大きい部分があっても、データ取得時間を短くする。
【解決手段】検査光を被検物に照射する照射部21と、検査光と被検物とを相対移動させる移動部と、検査光が照射された被検物を撮像し、撮像結果を出力する撮像部22と、撮像部22の撮像結果に基づいて、前記被検物の三次元形状を前記相対移動の方向に間隔をおいて演算する座標算出部53と、被検物の形状に応じて前記間隔を変更する制御部41と、を備える。
(もっと読む)
3次元形状測定装置
【課題】受光センサにて受光した反射光のスポットが欠けた場合であっても、精度良く測定対象物の3次元形状を測定できる3次元形状測定装置及び3次元形状測定方法を提供する。
【解決手段】受光信号の強度の閾値としてレベルL1を設ける。受光信号の強度が最も大きい受光素子の位置を基準位置P1(n)とする。基準位置P1(n)の両側から、受光信号の強度がレベルL1である受光素子又はレベルL1に最も近い受光素子の位置を1つずつ取得する。前記取得した2つの受光位置の中点と基準位置P1(n)とのずれ量D1が許容値以下であれば、基準位置P1(n)を反射光の結像位置P(n)と決定し、結像位置P(n)を用いて、その測定ポイントの3次元座標を算出する。ずれ量D1が許容値より大きければ、その測定ポイントの3次元座標を算出しない。
(もっと読む)
3次元位置計測システム、3次元位置計測装置および3次元位置計測方法
【課題】対象物の模様の方向に寄らずに安定した距離計測を行う。
【解決手段】カメラと3次元位置計測装置を備える。カメラは、移動体の移動に伴い回転する物体に取り付けられる。3次元位置計測装置は、記憶部と3次元位置計測部を備える。記憶部は、カメラで撮影された画像と、該複数の画像を各々撮影した時刻と同時刻のカメラ回転位置とを対応づけて記憶する。3次元位置計測部は、対象物の模様に対して、複数の画像から、模様の方向とは異なる方向に基線方向を与えるカメラ回転位置の少なくとも2つの画像を選択して、対象物の3次元位置を計測する。
(もっと読む)
移動量推定装置および移動量推定方法
【課題】移動体の移動量を精度よく推定する装置または方法を提供する。
【解決手段】移動量推定装置は、投影部、抽出部、推定部を備える。投影部は、移動体に取り付けられた複数のカメラにより得られる各映像についてそれぞれ路面投影像を生成する。抽出部は、投影部により生成される複数の路面投影像において複数のカメラの視野が重複する共通視野領域から、路面投影像間で互いに一致する画像パターンを抽出する。推定部は、抽出部により抽出される画像パターンの時間変化に基づいて、移動体の移動量を推定する。
(もっと読む)
ロール変位測定方法、及びそれを用いたロール変位測定装置、並びにフィルム厚測定方法、及びそれを用いたフィルム厚測定装置
【課題】被測定物が掛けられるロールの変位を高精度に測定し、被測定物の材質に拘わらず、被測定物の厚さ寸法を高精度に測定する。
【解決手段】ロール2の周面に、ロール軸に沿って延びる複数のマーキング2aを平行に設け、検出ヘッド5に、前記マーキングの接近を検出する近接センサ18,19を、前記ロールの中心軸を挟んで相対向する位置にそれぞれ設け、前記ロールにフィルム20が掛けられていない状態で、前記検出ヘッドを走査し、前記相対向する近接センサの間における第一の検出時間差と、前記ロールにおける第一の回転速度とを求めるステップと、前記ロールにフィルムが掛けられた状態で、前記検出ヘッドを走査し、前記相対向する近接センサの間における第二の検出時間差と、前記ロールにおける第二の回転速度とを求めるステップと、前記第一及び第二の検出時間差と、前記第一及び第二の回転速度とに基づいて、前記ロールの変位を求める。
(もっと読む)
コンベヤスケール
【課題】 重量測定方式と非接触測定方式との両方の要素を備えることによって、被輸送物の輸送量を求めるというコンベヤスケール本来の機能を確実に保証しつつ、特に重量測定方式の要素に故障等の異常が発生したときに、これを簡単な構成で検知する。
【解決手段】 本発明のコンベヤスケール10は、計量ローラ18と2台のロードセル22および24とを含む重量測定系と、7個の非接触型距離センサ30〜42を含む非接触型測定系と、を備えている。重量測定系が正常なときは、当該重量測定系によって求められた被輸送物100の精確な輸送量が制御装置50のディスプレイに表示される。重量測定系に異常が発生したときは、非接触型測定系によって求められた副次的に精確な輸送量が表示される。なお、重量測定系が正常であるか否かは、重量測定系によって求められた輸送量と非接触型測定系によって求められた輸送量との比較に基づいて、判定される。
(もっと読む)
撮像装置、物体検出方法及び姿勢パラメータの算出方法
【課題】特定のランドマークを設置しないでも、精度良く撮像装置の姿勢パラメータを取得可能な姿勢キャリブレーションを実現する。
【解決手段】撮像部により撮像された画像に含まれる物体を検出し、検出された少なくとも2つの物体について、それぞれ撮像された画像における正立状態からの回転角度を算出し、算出された前記少なくとも2つの物体の回転角度から撮像装置の設置角度に関する姿勢パラメータを算出する。
(もっと読む)
鏡面検査方法及びその装置
【課題】
鏡面検査装置において,高感度にかつ定量的に表面の凹凸を検出することが,困難であった。
【解決手段】
光源から発射された照明光を略平行光にして鏡面状の表面を有する試料に照射し、照明光が照射された試料からの反射光を集光レンズで集光し、集光レンズで集光した試料からの反射光をピンホールを通過させて反射光以外の光を遮光し、ピンホールを通過した試料からの反射光を集光レンズの焦点位置からずれた位置に配置された検出器で検出し、検出器で検出した信号を処理する鏡面検査方法において、検出器はピンホールを通過した試料からの反射光を異なる複数の条件で検出し、検出器で異なる複数の条件で検出した反射光の検出信号を用いて試料上の局所的な凹凸度の分布を検出するようにした。
(もっと読む)
1 - 20 / 157
[ Back to top ]