
Fターム[2F065QQ36]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | ウィンドウ発生 (311)
Fターム[2F065QQ36]に分類される特許
301 - 311 / 311
隙間の測定装置

【課題】厚みのある測定対象の隙間を測定するに際し、簡易な構成の装置にて厚み方向の隙間を精度よく測定できる隙間の測定装置を提供する。
【解決手段】本発明装置は、厚みのある検査対象における隣接面間の隙間を求める隙間の測定装置で、次の構成を有する。検査対象が配されると共に、隣接面間の隙間近傍に切欠を有するベース400。検査対象の一方側で、検査対象の厚み方向に対して傾斜した光軸を有するように配されて、検査対象の画像を取得する撮像手段(カメラ100)。検査対象の他方側に配されて、ベース400の切欠を通して検査対象に対して光を照射する光源200。撮像手段で得た検査対象の画像から隙間の間隔を求める画像処理手段800。
(もっと読む)
動き検出方法及び装置,プログラム,車両用監視システム

【課題】 演算量を削減でき、しかも複数の検出対象が存在しても個々の動きを検出可能な動き検出方法及び装置、並びにこれを利用した車両用監視システムを提供する。
【解決手段】 撮像装置3からの入力画像と予め設定された背景画像とに基づいて、背景画像に対して変化のある対象領域と変化のない背景領域とからなる二値化画像をフレーム毎に生成し(S120)、この二値化画像をフレーム間で比較することで、対象領域のまま変化のない重なり領域、背景領域から対象領域に変化した増加領域、対象領域から背景領域に変化した減少領域を抽出する(S130)。そして、互いに隣接する増加領域,減少領域,重なり領域を一つの統合領域として抽出し、その抽出した統合領域、及び増加領域,減少領域のそれぞれについて領域パラメータ(領域面積,X座標和,Y座標和)を求め(S140)、この領域パラメータに基づいて、統合領域毎にその統合領域に示された物体(対象領域)の動きを求める(S150)。
(もっと読む)
マスクの欠陥分類方法および分類装置
【課題】高速かつ高精度で、パターン欠陥の分類及び定量化を行うパターン欠陥分類方法およびパターン欠陥分類装置を提供する。
【解決手段】マスク(1)の製造に使用された設計データの画像と検査対象マスクの画像とを取得し、検査対象マスクのパターンの位置と検査範囲を設定し(23)、検査範囲内で設計データ画像に対するマスク画像の面積比を算出し(24)、検査対象マスクの画像のパターン円形度を算出し(27)、設計データの画像と検査対象マスクの画像の各パターンの重心座標をそれぞれ算出する(33)ことによってマスクの欠陥の種類を判断し分類する方法、およびかかる方法を実施する欠陥分類装置。
(もっと読む)
画像検査方法および画像検査装置
【課題】 閉塞特徴によって閉塞された被閉塞特徴を高精度に検査するための画像検査方法を提供すること。
【解決手段】 閉塞特徴としてのグリッド304と、被閉塞特徴としてのトレース320,330とを含む原画像に形態学的フィルタを適用して、グリッド304が除去されたフィルタ画像を適用する。フィルタ画像についてラインツール610を用いたエッジ検出を行い、エッジのおおよその位置を検出する。続いて、原画像に戻り、ラインツール610を用いたエッジ位置検出を行う。この際、ラインツール610は、フィルタ画像におけるエッジ検出に利用されたときよりも短くされており、エッジ検出対象範囲が、フィルタ画像について検出されたおおよそのエッジ位置の近傍に絞られている。これにより、ラインツール610は、グリッド304の影響を受けることなく、高精度にエッジ検出を行うことができる。
(もっと読む)
剥離紙付きのラベル測定方法、その測定装置およびラベルプリンタ
【課題】ラベルとラベルの間の間隔を正確に測定して印字精度を改善する。
【解決手段】ラベルを走行させてセンサ出力を得る。測定ウインド内でのセンサ出力が単調増加から単調減少に転じたときセンサ出力が単峰特性となる。このときのセンサ出力が基準レベル以上であるときラベル間隔での単峰特性と認識する。測定ウインド内の最新のセンサ出力と最古のセンサ出力とのレベル関係が逆転したときの、測定ウインドの中央点が単峰特性の極大点となる。この極大点を中心にして同じライン数離れたラベルの端面のセンサ出力が、一方はラベルの後端面の情報として、他方はラベルの先端面の情報として利用される。ラベル間隔に相当するセンサ出力のみを確実に検出できる。ラベルの透過率やサイズの違い、ラベル間隔のばらつきなどによらず、ラベル間隔を正確に検出でき、印字精度が向上する。
(もっと読む)
物体検出装置
【課題】 検出対象となる物体の形状や動きに依存することなく正確に物体の位置を検出する。
【解決手段】 車両20に搭載され、車両20の周囲を撮像するカメラ11と、調査点を中心とし、車両と、実空間における調査点との相対距離に応じて面積が決められた調査領域を画像上に設定し、設定された調査領域を、前記調査点を通過する分割線により2以上の領域に分割し、分割された各領域内の特徴量をそれぞれ算出し、算出したこの特徴量に基づいて、画像上の上部に位置する上部領域に物体が存在し、画像上の下部に位置する下部領域に物体が存在していないと判定した場合に、中心点までの実空間における距離を算出して、物体の位置を求める画像演算処理部13とを備えることで実現する。
(もっと読む)
部品実装装置
【課題】部品のパターンの検出精度を向上させ、セルマークやTAB−ICの検出精度を上げる。
【解決手段】所定の位置に搬送された実装部品のパターンを撮像カメラで撮像し、この撮像情報の2値化画像から前記実装部品のパターンを認識して前記実装部品を基板に位置決め供給する部品実装装置において、前記パターンの撮像画像の濃淡部を加算する加算処理手段と、この加算処理手段で処理された画像をエッジフィルタで処理して前記パターンのエッジを求めるエッジ検出手段とを設ける。
(もっと読む)
プリントされたはんだペーストの欠陥を検出するためのシステムおよび方法
基板上に堆積された物質の画像を分析する方法であって、画像は複数の画素を含み、この方法は、画像内で興味の対象となる領域を規定するステップと、第1および第2の垂直な軸に、興味の対象となる領域を関連付けるステップとを含み、画像内の1組の画素は、第1の軸に沿って位置し、この方法はさらに、興味の対象となる領域内の画素を、第1の軸にアライメントされかつ第2の軸に沿って突出する一次元アレイに変換するステップと、一次元アレイに少なくとも1つのしきい値を適用するステップとを含み、しきい値は、予め定められた限度に少なくとも部分的に基づく。 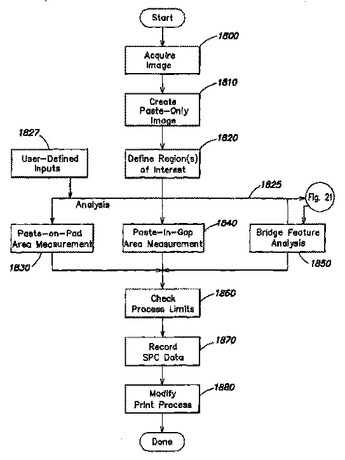 (もっと読む)
(もっと読む)
ステレオ検出器を使用して乗員および頭部ポーズを検出するためのシステムおよび方法
本願では、ステレオ検出器を使用して乗員および頭部ポーズを検出するためのシステムおよび方法を開示する。訓練ステージにおいて、ステレオカメラの対から同時に取り込まれたイメージの対が受信され、イメージの各対内の構成要素が識別される。各構成要素に対してフィーチャが関連づけられ、各フィーチャに対して値が関連づけられる。これらのフィーチャの中から、最も良好な判別能力を有するフィーチャのサブセットが選択され、イメージの対内の所与の構成要素に対して強いクラシファイアを形成する。検出ステージでは、入力されたイメージ対においてこの強いクラシファイアを使用して、構成要素が検出される。識別された構成要素は、乗員および該乗員の頭部ポーズを検出するために使用される。ステレオ検出がステレオマッチングと体系的に組み合わされることにより、乗員の検出および位置決定が改善される。  (もっと読む)
(もっと読む)
雄ネジの外観検査装置
図7に示す如く、雄ネジの外観検査装置は、基準の雄ネジのネジ外形画像に対して基準のデジタルゲージを設定し、基準の雄ネジのネジ外形画像と試験用の雄ネジのネジ部片側のネジ外形を撮影して得られたネジ外形画像42とのずれを求め、基準のデジタルゲージの位置を、雄ネジのずれに応じて位置補正し、位置補正したデジタルゲージ(上側デジタルゲージ73、下側デジタルゲージ74)と、ネジ外形画像42とを画像判定して雄ネジが正常品であるか否かを判定する。 (もっと読む)
車外監視装置
【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
301 - 311 / 311
[ Back to top ]