
Fターム[2F065QQ36]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | ウィンドウ発生 (311)
Fターム[2F065QQ36]に分類される特許
161 - 180 / 311
吸着部品表裏判定装置及び吸着部品表裏判定方法

【課題】部品実装機の吸着ノズルに吸着した部品を側面方向からカメラで撮像した画像に基づいて簡単な処理で該吸着部品の表裏を判定できるようにする。
【解決手段】吸着ノズルに吸着した部品を側面方向(水平方向)からカメラで撮像して吸着部品の側面の画像を取り込んで画像処理する。そして、画像に表される吸着部品の左右両端又はいずれか一方の端の高さ位置と該吸着部品の最下端の高さ位置を測定し、該吸着部品の左右両端又はいずれか一方の端の高さ位置と該吸着部品の最下端の高さ位置との差分値を算出して、該差分値が表裏判定しきい値以上であるか否かで、該吸着部品の吸着姿勢が表裏反対であるか否かを判定する。
(もっと読む)
改善された光学測距カメラ

【課題】一つの情景中の全ての画素から実質的に同時に深度情報を得る、改善された測距カメラを提供する。
【解決手段】情景中の被写体までの距離を示す画像を生成する装置であって、第1変調関数を有し、放射波を情景に向かわせる変調された放射波源と、検知変調器を含み、第2変調関数を有するとともに、検知アレイを有し、該アレイが複数の検知要素を含んでおり、情景内で複数の平行な間隔を有するセグメントから反射された放射を検知するとともに、上記検知された放射波に応じて、上記情景の領域までの距離に応答する信号を発生させる検知器と、間隔を有する複数のセグメントの少なくともいくつかを含むとともに上記装置から被写体までの距離を示す強度分布を有する画像を形成するプロセッサと、を含み、複数の間隔を有するセグメントの各々が上記装置に関して距離限界を有しており、該距離限界が上記検知変調器により決定され、複数の間隔を有するセグメントの少なくとも一つが少なくとも一つの他の間隔を有するセグメントの限界と異なる距離限界を有している。
(もっと読む)
パターン検査装置、パターン検査方法及びプログラム
【目的】擬似欠陥を低減させるパターン検査を行う装置および方法を提供することを目的とする。
【構成】本発明の一態様のパターン検査装置100は、パターン形成された被検査試料における光学画像データを取得する光学画像取得部150と、前記光学画像データと前記光学画像データに対応する参照画像データとを入力し、前記光学画像データの複数の画素値と前記参照画像データの複数の画素値との関係を基に、前記光学画像データの画素値レベルと前記参照画像データの画素値レベルとの少なくとも一方を調整するレベル調整回路140と、画素値レベルが調整された前記光学画像データと前記参照画像データとを比較する比較回路108と、を備えたことを特徴とする。
(もっと読む)
円盤状基板の検査装置
【課題】円盤状基板の表面に形成された膜層の状態を検査するに際して、精度を犠牲にすることなく、より効率的に処理することのできる円盤状基板の検査装置を提供するこ。
【解決手段】表示ユニットに表示された撮影画像上に検査エリアを設定し(S21)、撮影画像データから、撮影画像上の前記検査エリア内における膜層画像部分の縁線を検出して、当該検査エリアZ1内における該縁線の前記周方向の各位置でのエリア内縦方向位置情報を生成し(S22〜S27)、前記膜層画像部分のエリア内縦方向位置情報と、前記検査エリアの前記撮影画像上での設定位置を表すエリア縦方向位置情報と、基準縦方向位置情報Ysとに基づいて、基準部分を基準とした前記撮影画像上における前記膜層画像部分の縁線の膜層縁位置情報を生成し(S28)、該膜層縁位置情報に基づいて前記膜層についての評価情報を生成するように構成される。
(もっと読む)
検査支援システム
【課題】 検査結果を出力させる際に画像処理を優先させるのか出力処理を優先させるのかを選択することができる検査支援システムを提供する。
【解決手段】 制御プログラムの実行時に得られる検査結果を出力バッファ56に書き込む検査結果書込み部53と、出力バッファ56内のカメラ画像を読み出して出力するカメラ画像出力部57と、出力バッファ56内の計測結果を読み出して出力する計測結果出力部58により構成される。検査結果書込み部53は、出力バッファ56内の空き容量が不足した場合に、新たに得られた検査結果を書き込まずに制御プログラムの実行を継続させる画像処理優先書込み部54と、検査結果が読み出されることによって出力バッファ56に検査結果が書き込めるようになるまで制御プログラムの実行を中断させる出力処理優先書込み部55とからなる。
(もっと読む)
外観検査装置および外観検査方法
【課題】 本発明は、トレイのポケットに収納された検査対象物を複数の撮影視野で分割撮影する際に、トレイのポケットに収納された検査対象物の位置決めをすることなく、各撮影視野で撮影された画像を高精度に検査することができる外観検査装置および外観検査方法を提供することを課題とする。
【解決手段】 姿勢検出部56による位置合わせ処理によって算出された姿勢情報は、移動制御部59に出力され、移動制御部59は、姿勢情報に基づいて第2撮影視野82以降の全ての撮影視野8の撮影位置を決定する。また、姿勢検出部56によって算出された姿勢情報は、画像処理部57にも出力され、画像処理部57は、姿勢情報に基づいて画像から第1領域Aを検査領域として抽出して傾きを補正し、画像処理部57によって画像から抽出され傾きを補正された第1領域Aは、検査部58によって検査される。
(もっと読む)
部品実装検査の検査結果確認方法および検査結果確認システム
【課題】確認作業の効率を高め、作業員の負担を軽減する。
【解決手段】自動外観検査において不良と判定された部品に関する判定結果を確認するための確認操作画面において、不良と判定された部品の画像を、不良の種毎に、その不良の検出に用いられた判定基準に対する計測値の逸脱度合いの大きいものから順に並べた画像リストを表示し、良/不良の境界位置の指定を受け付ける。また1つの画像リストに対する指定が行われると、「不良」の範囲に含まれた各部品について、「実不良」であると確定し、以下の画像リストから削除する。最終的にリストに残された部品について、作業者の見過ぎ確定操作がなされると、見過ぎであると確定する。
(もっと読む)
欠陥解析装置及び欠陥解析方法
【課題】高精度な欠陥解析を行う。
【解決手段】回路パターンが形成されたウェーハの欠陥解析領域を複数の格子に分割する領域分割部12と、前記格子毎に前記回路パターンの設計データに基づくパターン特徴量を抽出するパターン特徴量抽出部13と、前記パターン特徴量に基づいて前記複数の格子を複数のグループに分類する領域分類部14と、前記欠陥解析領域において検出された欠陥情報と前記欠陥解析領域とを照合する欠陥座標照合部15と、前記グループ毎の欠陥サイズ分布を算出する欠陥サイズ分布算出部16と、前記グループ毎の前記欠陥サイズ分布と所定の推定分布との差分を算出する分布比較部17と、前記差分が所定の閾値以下のグループに対応する前記欠陥情報を出力する領域抽出部18と、を備える。
(もっと読む)
物体検出装置
【課題】平面上にある特定の物体を検出することができる物体検出装置を提供する。
【解決手段】演算処理装置12は、視差データ演算部121、路面パラメータ推定部122、路面投影部123、障害物範囲特定部124、障害物領域特定部125、距離測定部126及び表示画像生成部127を備える。障害物の検出にあたっては、まず、ステレオカメラ11から演算処理装置12へ2次元ステレオ画像を入力する。続いて、視差データ演算部121が、計測点Pにおける視差を演算し、路面パラメータ推定部122が路面パラメータである高さh及び傾きφを推定する。さらに続いて、路面投影部123が、基準画像上で計測点Pを路面に投影し、障害物範囲特定部124が障害物範囲を特定し、障害物領域特定部125が障害物領域を特定する。そして、障害物距離測定部126が、障害物までの距離を測定する。
(もっと読む)
包装容器に製品を挿入するピッキングライン並びに方法
本発明は、包装容器に製品を挿入するピッキングラインであって、搬送方向(x)における製品(14)の供給及び搬送のためのコンベヤベルト(12)と、コンベヤベルト(12)における製品(14)のポジションを特定するためのポジション画像処理系(20)を備えた少なくとも1つのピッカ(18)とが設けられている形式のものに関する。このような形式のピッキングラインにおいて本発明の構成では、搬送方向(x)で見て少なくとも1つのピッカ(18)の上流側に、品質画像処理系(16)が配置されていて、該品質画像処理系(16)は、コンベヤベルト(12)上を搬送方向(x)において品質画像処理系(16)のところを通過する製品(14)を、所定の品質特徴に関して検査するために働き、かつ搬送方向(x)で見て品質画像処理系(16)の下流側に続くピッカ(18)に伝えられる、製品(14)の把持又は非把持のための制御命令として役立つ品質情報と、製品(14)との対応付けのために働く品質画像処理系(16)である。 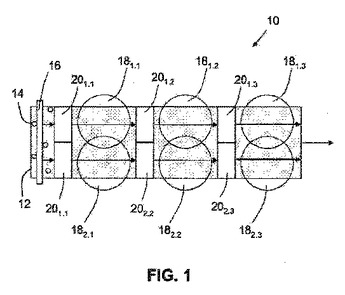 (もっと読む)
(もっと読む)
微小寸法測定方法および測定装置
【課題】
従来の微小寸法測定装置では、非測定物の測定画面に、類似あるいは同一のパターンが複数個ある場合、予め登録したパターン以外の同一または類似のパターンで測定する恐れがある。
【解決手段】
被測定物の所定部分を拡大してTVカメラで撮像し、該撮像した上記TVカメラの画像から画像処理により所定パターンの寸法を測定する微小寸法測定方法において、上記TVカメラの画像上に所定の大きさのサーチエリアと上記所定パターンをパターンマッチングで検出するための測定基準窓を設定し、上記測定基準窓を上記所定の大きさのサーチエリア内を適宜移動して上記所定パターンを検出するように構成される。
(もっと読む)
対象特定装置、対象特定方法および対象特定プログラム
【課題】道路周辺の地物の高精度な位置情報を容易に取得できるようにすることを目的とする。
【解決手段】計測車両200は道路を走行し、カメラ240は異なる地点から同一の道路標識を撮像し、GPS受信機210は各時刻における計測車両200の位置を測定し、LRF250は道路周辺の地物に対して距離方位データを取得する。三次元点群モデル復元部130は距離方位データを座標値で表した三次元点群モデルを生成し、点群画像投影部140は三次元点群モデルを撮像画像Aおよび撮像画像Bに投影する。グルーピング部150は道路標識の撮像範囲に投影された点群を抽出し、撮像範囲内の点群をグループ分けする。そして、標識点群特定部160は撮像画像Aの撮像範囲と撮像画像Bの撮像範囲とで一致したグループの点群を道路標識の点群として特定し、標識位置計算部170は特定された点群の座標値に基づいて道路標識の位置を算出する。
(もっと読む)
画像処理装置及びその方法
【課題】自車両に搭載された2つのカメラから、自車両が走行している遠方の道路勾配を推定する画像処理装置を提供する。
【解決手段】自車両から予め設定された距離より近い領域を近接領域、道路面領域と近接領域が重なる領域を近接道路面領域、及び、近接領域より遠方の領域を遠方領域と設定し、左右画像における近接道路面領域及び遠方領域内のそれぞれから特徴点を検出し、左右画像における特徴点のそれぞれの3次元位置情報を計算し、左右画像のそれぞれから道路面上に存在する白線を検出し、白線を遠方領域へ延長することにより、延長した白線における遠方領域内の水平方向と奥行き方向のそれぞれの位置を推定し、複数の画像におけるそれぞれの遠方領域内における特徴点から一定の長さ以上のエッジセグメントを検出し、エッジセグメントの3次元位置情報を計算し、遠方領域における道路勾配を推定する。
(もっと読む)
ロボット追従式画像検査装置
【課題】自動車用窓ガラスのプライマ塗布領域のような帯状の検査対象領域について、プライマ塗布状態等の検査対象を効率良く高精度で検査できるようにすることである。
【解決手段】検査対象物30上の帯状の検査対象領域を撮影して、この撮影した画像から検査する画像検査装置であって、撮影装置18および該撮影装置18が撮影する検査対象領域を照明する照明装置22を取付けたロボットハンド12と、該ロボットハンド12に取付けられた撮影装置18と照明装置22を検査対象領域上に設定された経路に沿って移動させるロボットハンド移動手段と、該ロボットハンド移動手段により前記撮影装置18が検査対象領域上の経路に沿って移動する際に該検査対象領域を連続撮影して画像を取得する画像取得手段とを備える。
(もっと読む)
マシンビジョンシステムの作動方法及びケース特有境界位置決めシステム
【課題】本発明は、複数の異なる画像特性に基づいたエッジ位置を正確に検出することができるマシンビジョンシステムの作動方法及びケース特有境界位置決めシステムを提供する。
【解決手段】マシンビジョンシステムの作動方法及びケース特有境界位置決めシステムは、テクスチャ、強度、色等の複数の異なる画像特性に基づいてエッジ又は境界の位置を正確に検出し位置決めする。ユーザは、例えば、テクスチャに基づいてエッジ発見演算(又は作動)を、場合によっては、従来の強度勾配エッジ位置決め作動によって実行する境界検出ツールを起動することができる。境界検出ツールは、捕捉された対象物の画像のエッジ又は境界を含む主な注目領域を規定する。境界検出ツールは、現在の対象物のエッジを位置決めし、また迅速且つ確実に将来の類似対象物の対応エッジを位置決めするのに用いることができる。
(もっと読む)
移動体姿勢検出装置
【課題】測定対象物に装着または内蔵され、どのような環境でも良好に使用できる移動体姿勢位置検出装置を提供する。
【解決手段】測定対象物としての移動体の空間上の3軸の姿勢角度情報、並進位置情報、画像姿勢情報をそれぞれ算出する手段と、姿勢角度情報と、並進位置情報と、画像姿勢情報のそれぞれの情報により空間上での移動体の6軸姿勢情報を算出する手段と、を有し、並進位置検出手段は、直交する3軸上の空間の並進方向の加速度情報を検出し、画像処理姿勢検出手段は、装置周辺の画像を時系列に入力された画像の中から複数の特徴点を抽出して記憶すると共に、以前に記憶されている特徴点の座標等の特徴点情報を探索検出し、特徴点の2次元画像の中での変位から画像の動きベクトルを検出し、姿勢角度情報と、並進方向の加速度情報とに基づいて画像データ上での特徴点の2次元の動きを推定することにより探索検出の範囲を狭める。
(もっと読む)
情報処理システム
【課題】画像間の座標点を高精度に対応付ける。
【解決手段】基準画像3B上で指定される指定点3Pに対応する参照画像3R上の対応点を特定する際に、指定点3Pに対応する位置を通る第1基準方向に沿った線上で探索して第1対応点候補3N1を特定し、第1対応点候補3N1を通り、かつ第1基準方向に略垂直な第2基準方向に沿った線上で探索して第2対応点候補3N2を特定し、さらに第2対応点3N2を通り、かつ第1基準方向に沿った線上で探索して第3対応点3N3を特定する。
(もっと読む)
シート状物の検査方法及び検査装置
【課題】打ち抜きにより形成された外周縁のへこみ部分を効率良く検査することのできるシート状物の検査方法及び検査装置を提供することである。
【解決手段】打ち抜きにより形成されたシート状物の外周縁形状の適否を検査するシート状物の検査方法であって、前記シート状物を含む所定視野範囲を撮影して、該シート状物を表す物体画像を含む画像を取得する画像取得ステップ(S1)と、前記取得された画像において、前記シート状物の外周縁に形成されたへこみ部分に相当する前記物体画像のへこみ部分の深さを計測するへこみ深さ計測ステップ(S4〜S7)と、計測された前記物体画像のへこみ部分の深さが所定許容範囲内であるか否かを前記シート状物の外周縁形状の適否として判定する第1判定ステップ(S8)とを有する構成となる。
(もっと読む)
測距装置およびその測距方法
【課題】被測定物までの距離を高精度に測距できる測距装置およびその測距方法を提供することを目的とする。
【解決手段】本発明に係る測距装置は、撮像レンズを介して被測定物を撮像する少なくとも3つのカメラと、少なくとも3つのカメラから2つのカメラを選択する出力選択部30と、2つのカメラにより被測定物を撮像させ、撮像された2つの画像における被測定物の所定領域を示す2つの所定領域画像と2つの撮像レンズとの位置関係から、被測定物の所定領域までの距離を測定する演算部40とを備えて構成されている。そして、出力選択部により選択された2つのカメラは、その光軸が互いに平行でかつ同一方向に向いており、また、少なくとも3つのカメラにおいて、そのうちの3つのカメラが同一直線上に並ぶことなく同一面上に配置されている。
(もっと読む)
着色トレーサ異常検出装置および異常検出方法
【課題】光ケーブル用スペーサに付与した着色トレーサの異常を全長にわたって確実に検出する。
【解決手段】着色トレーサ異常検出装置は、撮影カメラ11、照明12、背景用反射板13、演算装置14、およびモニター15を備える。演算装置14は、撮影カメラ11で撮影した画像から、着色トレーサのヤケカスやブツの異物を検出する。この演算装置14では、撮影カメラ11で撮影した画像を取り込み、その画像データに対して光ケーブル用スペーサ1の進行方向に微分処理を行い、さらに所定のしきい値を用いて二値化処理を行って、得られた二値化データに従って着色トレーサの異常を検出する。
(もっと読む)
161 - 180 / 311
[ Back to top ]