
Fターム[2F065QQ36]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | ウィンドウ発生 (311)
Fターム[2F065QQ36]に分類される特許
121 - 140 / 311
ワークの位置を求める画像処理装置
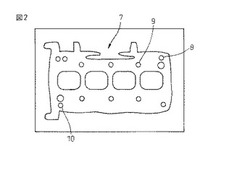
【課題】輪郭が不安定なワークを検出する際に、ワーク上に略同形の形状が複数存在している場合でもワークの誤認識を防ぐとともに、ワークの正確な位置姿勢を認識する画像処理装置を提供する。
【解決手段】鋳物部品等の輪郭が不安定なワーク7をパターンマッチングで認識する場合、まずワーク7の輪郭を認識して、その結果を使ってワーク上の所定部位8及び10を探索する範囲やパラメータを調整する。調整された探索範囲やパラメータを使ってワーク上の所定部位を認識することで、同形の形状が複数存在した場合でもワークの誤認識を防ぐとともに、ワークの正確な位置姿勢を認識することができる。
(もっと読む)
電子部品実装装置および電子部品実装装置における画像読取り方法

【課題】画像読取りのための所要時間の短縮を可能とし、部品搭載動作のタクトタイムを改善することができる電子部品実装装置および電子部品実装装置における画像読取り方法を提供することを目的とする。
【解決手段】基板搬送機構2を挟んだ両側に部品搭載機構が配置された構成の電子部品実装装置において、搭載ヘッド14A,14Bに保持された電子部品の画像を下方から読み取る第1の画像読取り部6A、第2の画像読取り部6Bの構成を、当該画像読取り部に対応する搭載ヘッドを基板搬送方向であるX方向、X方向に直交するY方向へそれぞれ移動させて画像の読み取りを行う第1方向走査動作、第2方向走査動作のいずれによっても画像の読み取りが可能な構成とする。これにより、部品搭載動作において第1方向走査動作、第2方向走査動作のいずれかタクトタイムロスのない方を選択することができる。
(もっと読む)
3次元位置計測装置
【課題】対応点の探索に要する計算量を大幅に減らし、短時間でかつ高精度に、かつトラブルの発生も含めて、対応点の3次元位置を計測することを可能とする。
【解決手段】対象物を異なる視点から見た複数の画像を取り込む。その画像の1つを基準画像、それ以外を参照画像とする。基準画像および参照画像から、カメラパラメータおよび基準点から計算されるエピポーラ線に沿って、所定幅Wの1次元の画素データ列を切り出す。この切り出した1次元の画素データ列から位相限定相関関数を計算することによって相関ピークの位置Ph(x,y)を求め、この相関ピークの位置Ph(x,y)から位置ずれ量dを求め、この位置ずれ量dから基準点pに対応する対応点qを探索する。この対応点の探索過程において、相関ピークの値Phが予め定められている下限値Phthに満たない場合、異常である旨を通知すると同時に、以降の3次元位置の計測を中止する。
(もっと読む)
3次元計測装置およびその方法
【課題】カメラの位置や特性の違いによる影響を受けずに、かつ、精度良く鏡面物体の3次元形状を測定する。
【解決手段】鏡面物体である計測対象物の3次元形状を計測する3次元計測装置であって、複数のカメラと、撮影された画像のそれぞれから計測対象物の表面の物理特徴である法線の向きを取得する特徴取得手段と、この物理特徴を用いて画像間で対応する画素を探索する対応画素探索手段と、対応する画素間の視差に基づいて3次元測量を行う測量手段と、を備える。なお、各画像における法線の向きを共通の座標系に変換する座標変換手段を有することが好適である。この座標変換のパラメータはカメラキャリブレーションの際に得られるパラメータから算出することができる。
(もっと読む)
熱交換器のフィン抽出検査方法
【課題】熱交換器のコアのフィン検査方法を提供する。
【解決手段】撮像手段が、フィンとチューブを具備する熱交換器のコアを撮像して、画像処理装置に、撮像データを入力して記憶させるステップと、前記撮像データにおいて、前記コア全体が撮像されている第1の領域を設定するとともに、全ての前記チューブの少なくとも一部が撮像されている第2の領域を設定して前記チューブの位置情報を特定するステップと、前記特定された前記チューブの位置情報に基づいて隣り合うチューブ間にフィン検出用の第3領域を設定するステップと、前記第3領域内において動的2値化処理及びノイズ除去処理をしてフィンの画像を求め、該フィンの画像からチューブ長手方向に亘るフィンのエッジ位置情報を特定するステップと、前記フィンのエッジ位置情報に基づいてピッチ間隔の統計処理を行い、フィン不良を判別するステップからなるフィン検査方法。
(もっと読む)
基板外観検査装置、およびはんだフィレットの高さ計測方法
【課題】はんだフィレットの高さの計測精度を向上し、信頼度の高い検査を実現する。
【解決手段】同軸落射照明用の赤外光および赤、緑、青の各色彩光を基板に照射しながら、赤外光および可視光を分離して受光する機能を有するカメラにより基板上のフィレット102を撮像する。つぎに、生成された画像において、各照明光の正反射光像領域が連なっている方向に沿う計測ラインLを設定し、このラインL上で、各正反射光像領域および暗領域の境界点A1〜A6を検出する。つぎに、各正反射光領域の境界点A1〜A5に、それぞれ対応する照射角度範囲の境界を表す角度から求めた傾斜角度を適用し、各点A1〜A5の座標D1〜D5に各傾斜角度を対応づけて、ラインL上の傾斜角度の変化を表す近似曲線を設定する。そして、点A1から点A6までに相当する範囲を対象に近似曲線を積分し、この演算により得た計測値をはんだの濡れ上がり高さとして特定する。
(もっと読む)
作業機械のステレオ画像処理装置
【課題】明るさが大きく変動する環境下における3次元形状計測に際しての各カメラによる撮影画像を、撮影部位の明るさが互いに同等となる撮影画像として取得できる。
【解決手段】アーム3に設けられ、明るさ調整用のマーカ6と、第1カメラ51、第2カメラ52のそれぞれの撮影画像よりマーカ6付近の撮影部位を検出するマウス9を含む撮影部位検出部と、この撮影部位検出部で検出された第1カメラ51、第2カメラ52による撮影部位の平均明るさA1,A2をそれぞれ求めるとともに、撮影部位それぞれの平均明るさA1,A2の差を演算する明るさ比較処理部72と、この明るさ比較処理部72によって求められた第1カメラ51、第2カメラ52による撮影部位それぞれの平均明るさA1,A2の差が少なくなるように、第1カメラ51、第2カメラ52のシャッター速度を調整する調整部とを備えた。
(もっと読む)
画像処理におけるパターンモデルの位置決め方法、画像処理装置、画像処理プログラム及びコンピュータで読み取り可能な記録媒体
【課題】最小二乗法を用いた精密位置決めの精度、特に回転角度の精度を向上させる。
【解決手段】登録画像から輪郭を抽出し、登録画像のパターンモデルを構築する工程と、サーチ対象画像を取得すると共に、該サーチ対象画像中に含まれる登録画像に対応する初期位置を取得し、該初期位置に従って、前記パターンモデルをサーチ対象画像上に重ねるように配置する工程と、前記パターンモデルを構成する各円弧セグメントに対応するサーチ対象画像上の個々の対応エッジ点を求める工程と、各円弧セグメントとその対応エッジ点との関係を評価値とし、該評価値の累積値が最小又は最大となるように、前記与えられた初期位置の精度よりも高い精度で精密位置決めを行う工程とを含む。
(もっと読む)
物体の移動検出方法およびプリンタ
【課題】 プリントメディア等の物体の移動を高い精度で検出することが可能な方法の提供。
【解決手段】 イメージセンサを用いて、物体の同一領域を複数の異なる方向から撮像して画像を取得する。同一領域に対応する、イメージセンサ上での分離された複数の領域の位相差を求めて、これに基づいて取得した画像の倍率を補正して補正画像を生成する。物体の移動に伴って上記の処理を繰り返し、得られた複数の補正画像をパターンマッチングにより比較して、物体の移動量を検出する。
(もっと読む)
熱交換器のチューブ抽出検査方法及び装置
【課題】フィン(13)とチューブ(12)を具備する熱交換器のコア(11)の外観検査方法及び装置を提供する。
【解決手段】フィン(13)とチューブ(12)を具備する熱交換器(10)のコア(11)の外観検査装置であって、該外観検査装置が、撮像手段(3〜5、7)と画像処理装置(2)を具備しており、撮像データを平均化処理と動的2値化処理をしてチューブの画像のみを取り出す画像処理手段と、取り出された前記チューブの画像に対して、チューブの幅方向の中心座標からなるチューブ長手方向に亘る中心軸を求める演算手段と、求められた前記中心軸を、基準値と比較することでチューブ長手方向に亘る最大変位(ΔT)を求め、前記最大変位(ΔT)が、所定の閾値(c1)以上の場合に、チューブ不良と判別する判別手段とからなる熱交換器のコアの外観検査装置。
(もっと読む)
外観検査方法および外観検査装置
【課題】梱包状態にある電子部品の外観を検査するに当たって、梱包材の生じる影によって端子の曲がりの検出精度が低下することを防止する。
【解決手段】撮像過程では、透光性を有するカバーテープP2を通して端子Tを含む電子部品Dの濃淡画像を撮像する。その後、補正値算出過程では、各端子Tごとに端子T周辺の背景領域に周辺ウィンドウWを設定して周辺ウィンドウW内の平均濃淡値を検出し、各端子Tごとに、周辺ウィンドウWの平均濃淡値と基準値との差分値を補正値として算出する。補正過程においては、濃淡画像における各端子Tの濃淡値をそれぞれ前記補正値の分だけ高くなるように補正する。しかして、第1検出過程では、補正後の端子Tの平均濃淡値に基づいて端子Tの厚み方向の曲がりを検出することにより、影Nの影響を受けることなく端子Tの曲がりを検出することができる。
(もっと読む)
高速画像再構築方法
【課題】精度が高く、演算速度が速く、補間精度と補間間隔が変化可能な補間方法を提供する。
【解決手段】予めフーリエドメイン光干渉断層計システムの特性により、波長情報を抽出し、波長空間に均一に分布している一組の波長ベクトルを得ることにより、当該波長ベクトルのCCDにおける仮想位置係数を得て、離散フーリエゼロパディング補間方法の伝達関数により重み係数マトリックスを生成し、システムの作動時に、重み係数マトリックス及び収集されたデータに基づいて補間を行うか又はデータマトリックスに対して窓掛け、切捨てを行った後補間して、所望の補間データを得る。
(もっと読む)
物体検出装置及び物体検出方法
【課題】高い精度で、物体を検出する物体検出装置及び物体検出方法を提供する。
【解決手段】自車両に搭載されるカメラ10と、撮像された画像の情報に基づいて、画像中の物体に対応する画素の移動方向及び/又は移動速度を含む移動情報を算出する移動情報算出部20と、移動情報に基づいて物体を検出する検出手段30を備え、検出手段30は、算出された移動情報のうち、所定の基準点から所定角度の方向に沿って存在する物体に対応する画素の移動情報を抽出する移動情報抽出部31と、自車両の車速に応じた、画像の所定の基準点から所定角度の方向に沿って存在する路面上の画素の移動情報と画素の自車両に対する位置との関係に基づいて、物体の同一性を判断する基準となる速度分解能を算出する速度分解能算出部32と、抽出された画素の移動速度を比較し、移動速度の差が速度分解能以上である場合は異なる物体であると判断する同一物体判断部33とを有する。
(もっと読む)
運動推定装置及びプログラム
【課題】簡易な構成で、撮像手段の位置及び姿勢の変化を高精度に推定することができるようにする。
【解決手段】画像撮像装置12によって第1の画像及び第2の画像を撮像し、特徴点抽出部30によって、第1の画像から、複数の特徴点を抽出し、対応点検索部32によって、抽出された特徴点の各々に対応する点を、第2の画像から検索する。また、特徴点重み決定部34によって、特徴点の各々について、第1の画像の特徴点を中心としたウィンドウ内に存在する特徴点の数が少ないほど大きい重み係数を決定する。そして、運動推定部36によって、対応する第1の画像の特徴点と第2の画像の点との複数の組に基づいて推定される画像撮像装置12の位置及び姿勢の変化であって、第1の画像と第2の画像との間で対応する特徴点と点との組の重み係数の総和が最大となる位置及び姿勢の変化を、画像撮像装置12の位置及び姿勢の変化として推定する。
(もっと読む)
三次元監視システムおよびコンピュータプログラム
【目的】 風力発電装置において、広域を効率的に探査してバードストライクを効率的に減らす飛来物衝突回避システムを提供する。
【構成】 複数のブレードを備えた風力発電装置と、その風力発電装置の周囲の飛来物を検知可能な障害物探査装置と、 回転停止ポジションを含めたブレードの角度変更を制御するブレード角度制御手段とを備える。 前記障害物探査装置は、風力発電装置の周囲の映像を異なる角度から複数種類を連続的に撮影可能であるように配置された撮像装置と、 その撮像装置による撮像データを解析する撮像データ解析装置とを備える。 解析結果が前記風力発電装置のブレードに向かって飛来する飛来物が存在するという場合には、当該飛来物を追跡撮影させる撮影制御信号を前記撮像装置へ出力する。 前記飛来物が風力発電装置に近づいてくると判断した場合には、前記ブレード角度制御手段がブレードを回転停止ポジションに変更する制御信号を出力する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】検査対象の欠陥の検出精度を向上させること。
【解決手段】画像処理装置は、入力画像の一部である変換対象領域を、入力画像から順次選択する変換対象領域選択部と、複数の変換対象領域のそれぞれについて、変換対象領域を含む種類が異なる複数の周辺領域を抽出する周辺領域抽出部と、複数の変換対象領域毎に、複数の周辺領域のそれぞれについて、周辺領域の画像を用いて変換対象領域の画像を変換することにより、複数の変換画像を生成する画像変換部と、複数の周辺領域の種類毎に、複数の変換対象領域に対応する複数の変換画像を組み合わせることにより、複数の出力画像を生成する出力画像生成部とを備える。
(もっと読む)
熱交換器のチューブ幅検査方法及び装置
【課題】フィン(13)とチューブ(12)を具備する熱交換器のコア(11)の外観検査方法を提供する。
【解決手段】フィン(13)とチューブ(12)を具備する熱交換器のコア(11)の外観検査方法において、単一チューブが撮像されている領域(W)を特定し、前記領域(W)における撮像データを平均化処理と動的2値化処理をしてチューブの画像のみを取り出し、前記領域を複数のブロックに分割し、分割した各ブロックにおいて、チューブを囲む最小四角形を求めることでチューブの幅寸法(a1〜a5)を求め、求められた各ブロックでのチューブ幅寸法(a1〜a5)を、所定の閾値(A)と比較し、各ブロックでのチューブ幅寸法(a1〜a5)が全て前記所定の閾値(A)以下の場合に、良品と判別することを特徴とする。
(もっと読む)
溶接ビード検査方法、及び、溶接ビード検査装置
【課題】ビード部両側の母材面が曲率の大きな曲面形状であってもビード部の形状を精度良く検出することができ、適切な検査が可能となる溶接ビード検査装置および溶接ビード検査方法を提供する。
【解決手段】ビード検査装置1に備えられる演算手段は、断面プロファイルの第一母材又は/及び第二母材上に、任意の一定幅Dの母材推定区間と、該母材推定区間に対して前記ビード側に隣接し、前記母材推定区間のビード側端点における曲率kに応じて区間幅δが定められるビードエッジ探索区間と、からなる母材区間を設定する、設定手段と、前記母材推定区間中の断面プロファイルのデータから、前記母材の近似曲線となる母材推定曲線を推定し、該母材推定曲線を用いて、ビードエッジ探索区間におけるビードエッジを検出する、ビードエッジ検出手段と、を備える。
(もっと読む)
軌道変位測定装置
【課題】 軌道異常を安価な構成で確実に検出することのできる軌道変位測定装置を提供する。
【解決手段】 鉄道軌道(32)あるいは軌道近傍に配置した複数の撮影用ターゲット(A1〜A4、B1〜B4)と、これら複数のターゲットがすべて含まれる画像を撮影するデジタルカメラ11と、このデジタルカメラの撮影時刻を制御し、撮影画像の保存および該撮影画像を用いた各ターゲットの座標演算ならびに演算結果を保存する制御ユニット10とからなる。制御ユニットは、撮影画像からターゲットの座標を演算し、撮影ごとの座標の演算結果をもとに運用開始からの座標の経時変化から軌道の変位を測定する。
(もっと読む)
車両の車幅を推定するための装置
【課題】車両の車幅を推定する。
【解決手段】車両を撮像し、撮像された画像から、車両のホイールおよび名バープレートを認識する。路面に平行な仮想平面上に、該認識されたナンバープレート上の第1の点を投影すると共に、該認識されたホイール上の、前記車両の車両長方向に沿った第2および第3の点を投影し、該第2および第3の点を結ぶよう第1の線を設定すると共に、該第1の線に直交するよう該第1の点から伸長する第2の線を設定して、該第1の線および該第2の線の交点を算出する。該交点と、該認識されたナンバープレートの車幅方向における中心との間の距離に基づいて、車両の車幅を推定する。ホイール上の第1の点とナンバープレート上の車幅方向に沿った第2および第3の点を投影して、交点を算出してもよい。
(もっと読む)
121 - 140 / 311
[ Back to top ]