
Fターム[2F065QQ36]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | ウィンドウ発生 (311)
Fターム[2F065QQ36]に分類される特許
61 - 80 / 311
三次元形状計測装置、三次元形状計測装置のキャリブレーション方法、およびロボット装置
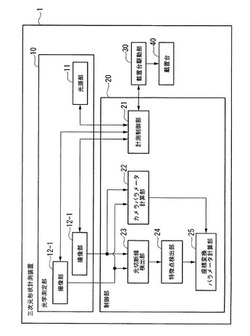
【課題】複数の方向から計測対象物体を撮像して三次元形状を計測する三次元形状計測装置のキャリブレーションを、簡便な作業で短時間に行う。
【解決手段】三次元形状計測装置1は、キャリブレーション用ブロックと、撮像部12−1,12−2がそれぞれ撮像した撮像画像領域から、キャリブレーション用ブロックの上面に照射されたスリット光による光切断線をそれぞれ検出する光切断線検出部23と、光切断線検出部23がそれぞれ検出した光切断線から特徴点をそれぞれ検出して二次元座標値を取得する特徴点検出部24と、二つの撮像画像領域それぞれにおける特徴点の二次元座標値を単一の二次元座標系の二次元座標値に変換するための座標変換パラメーターを計算する座標変換パラメーター計算部25とを備えた。
(もっと読む)
ステレオ画像処理方法およびステレオ画像処理装置

【課題】 対象物と撮像装置との距離に応じて、高精度、高速に対象物の3次元情報を取得する。
【解決手段】 対象物を撮像する撮像装置と、同一の対象物を複数の方向から撮像した複数の高解像度画像を取得する画像取得部と、低解像度画像を生成する低解像度画像生成部と、基準画像上の点に対応する比較画像上の対応点を探索する対応点探索部と、対応点の探索結果に基づいて3次元情報を演算する3次元情報演算部と、低解像度画像に基づく3次元情報から高解像度画像における探索点の距離範囲を決定する距離範囲決定部と、距離範囲に基づいて高解像度画像における探索ウィンドウサイズを決定するウィンドウサイズ決定部と、距離範囲により定まる視差範囲に基づいて高解像度画像における前記対応点の探索範囲を限定する探索範囲限定部と、を備える。
(もっと読む)
視覚障害者用空間認識装置、方法およびプログラム
【課題】本発明は、視覚系に比較して格段に分解能が低い感覚系(触覚系、聴覚系など)を介してユーザに三次元空間を高精度に認識させることが可能な新規な視覚障害者用空間認識装置を提供することを目的とする。
【解決手段】ステレオ撮像装置の主カメラが撮像した主画像の一部の画素領域を注目領域として定義し、当該注目領域を構成する各画素について副カメラが撮像した副画像との間でステレオマッチングを実行し、全画素についての距離値を算出する。算出された複数の距離値について統計的な代表値(たとえば平均値)を導出し、当該代表値が小さくなるほど大きな出力レベルでバイブレータを駆動する。ステレオ撮像装置を動かすことに応答して、バイブレータの出力レベルが経時的に変化する。ユーザは、触覚により感受される振動レベルの経時的変化から障害物の奥行き感を認知する。
(もっと読む)
オプティカルフロー推定装置、オプティカルフロー推定方法及びオプティカルフロー推定プログラム
【課題】反射表面を有する観測対象のオプティカルフローを推定すること。
【解決手段】観測画像の各画素の輝度値を反射特性が考慮された光学モデルで定義し、定義された光学モデルをオプティカルフロー法の拘束条件に適用し、適用された拘束条件からオプティカルフローを推定する目的関数を導出して、目的関数を最小化問題として解くことにより、観測対象のオプティカルフローを推定するので、反射表面を有する観測対象のオプティカルフローを推定する。
(もっと読む)
三次元形状計測装置、キャリブレーション方法、およびロボット
【課題】三次元形状計測における高さ方向のキャリブレーションを効率的に且つ高精度に行う。
【解決手段】階段形状のキャリブレーション用ブロックと、これが載置される載置台40を移動させる載置台駆動部30と、撮像画像から光切断線を検出する光切断線検出部22と、光切断線から特徴点を検出して特徴点座標値を計算し、この特徴点座標値と載置台40の移動ピッチとキャリブレーション用ブロックの所定の属性データとを関連付けた特徴点情報を生成する反射位置計算部23と、特徴点座標値と移動ピッチとから世界座標系における特徴点の三次元座標値に変換する変換行列を計算する変換行列計算部24と、特徴点情報と変換行列とに基づいて、撮像画像の画像平面の二次元座標値とこれに対応する世界座標系の三次元座標値との組み合わせを求めて校正用データを生成する三次元座標変換部25とを備えた。
(もっと読む)
光波干渉測定装置
【課題】干渉縞の濃淡に基づき対象物の形状を測定する光学干渉測定装置において、干渉縞の観測対象領域を自動的に設定する。
【解決手段】ベースプレート36と、これの上に置いたブロックゲージ34の干渉縞画像を複数得る。取得した複数の画像において、ベースプレートとブロックゲージの境界であるエッジ抽出を行い、エッジ画像を得る。エッジ画像を加算して、さらに所定のしきい値により二値化し、ベースプレートとブロックゲージの境界を抽出する。得られた境界に基づきブロックゲージ上の干渉縞画像を得る。
(もっと読む)
3次元形状測定装置及び3次元形状測定方法
【課題】 ステージを回転軸周りに回転させながら3次元形状測定を行う場合に、3次元カメラの位置を異ならせても効率の悪化を防ぐ。
【解決手段】 コントローラ30は、第1のカメラ位置に配置した3次元カメラ20の測定により取得したステージ10の定点の座標又はベクトルの成分を記憶しておく。コントローラ30は、第1のカメラ位置と異なる第2のカメラ位置に配置した3次元カメラ20の測定により取得したステージ10の定点の座標又はベクトルの成分と、前記記憶しておいたステージ10の定点の座標又はベクトルの成分とを用いて、第2のカメラ位置で3次元カメラ20により測定した3次元形状を表す3次元データを、第1のカメラ位置で3次元カメラ20により測定した3次元形状を表す3次元データに座標変換するためのカメラ座標変換係数を取得する。
(もっと読む)
画像測定機、プログラム、及び画像測定機のティーチング方法
【課題】ティーチング操作の作業性や効率を向上させる。
【解決手段】ワークの閉領域情報を有するガーバーデータを記憶するデータ記憶部131と、ガーバーデータの閉領域情報に基づくパターン画像を表示する表示部4と、パターン画像に重ねて、検出すべきエッジ位置、検出方向及び検出長さを指定する検出ツールSを表示部4に表示させる検出指定情報表示プログラム133と、ワークの検出ツールSに対応する領域を撮像する撮像プログラム134及び撮像部3と、撮像された画像のデータに対して、検出ツールSにより指定された検出方向及び検出長さで検出すべきエッジ位置のエッジ検出を行うエッジ検出プログラム141と、エッジ検出を行う場合、検出方向に沿って画像が明部から暗部に変化するか又は暗部から明部に変化するかを示す明暗変化条件を、ガーバーデータを用いて決定する条件決定プログラム140と、を備える。
(もっと読む)
鉛蓄電池用格子体鋳造装置の異常判定方法
【課題】鉛蓄電池用格子体に存在する形状変化を、バラツキなく高精度で検出できるばかりではなく、検出した鉛蓄電池用格子体の形状変化から、鉛蓄電池用格子体鋳造装置の異常、例えば、鋳造鋳型に塗布されている離型剤の寿命及び鋳造装置の不具合を迅速かつ適確に判定可能な、鉛蓄電池用格子体鋳造装置の異常判定方法を提供するものである。
【解決手段】鋳造された鉛蓄電池用格子体の形状変化を検出して、鉛蓄電池用格子体鋳造装置の異常を判定する方法であって、(a)鉛蓄電池用格子体の形状変化検出領域を照明する工程、(b)照明された形状変化検出領域を撮像する工程、(c)撮像された画像に2値化処理及び任意的に収縮処理を施す工程、(d)上記処理後の画像から鉛蓄電池用格子体の形状変化を検出する工程、並びに(e)検出した形状変化から、鉛蓄電池用格子体鋳造装置の異常を判定する工程を含む、鉛蓄電池用格子体鋳造装置の異常判定方法。
(もっと読む)
ターゲット投影装置及びターゲット投影方法
【課題】測定対象に投影されたターゲットが検出し難い場合に、投影用ターゲット画像を補正して、再度投影できるターゲット投影装置を提供する。
【解決手段】ターゲットTが表示された投影用ターゲット画像F1を測定対象2に投影する投影部3、投影部3から投影用ターゲット画像F1を投影して測定対象2に映されたターゲット映像F2を撮影して撮影画像F3を得る撮影部4、撮影部4で撮影された撮影画像F3からターゲットTの特徴を検出するターゲット特徴検出部62、撮影画像F3におけるターゲットTの特徴に関する所定の許容条件を記憶する許容条件記憶部54、撮影画像F3が所定の許容条件を満たすか否かを判定する許容条件判定部7、許容条件判定部7が所定の許容条件を満たさないと判定した場合には、所定の許容条件を満たすようにターゲットTの特徴を変更して投影用ターゲット画像F1を補正する画像処理部8とを備える。
(もっと読む)
半田印刷検査装置及び半田印刷システム
【課題】半田印刷を行うにあたり、生産性の低下抑制等を図ることのできる半田印刷検査装置及び半田印刷システムを提供する。
【解決手段】半田印刷検査装置は、CCDカメラによって撮像された画像データに基づき、2つのランド2a,2bと接する半田ブリッジ3bを検出し、当該半田ブリッジ3bと接する2つのランド2a,2bの間の距離L1をブリッジ距離として算出する。そして、当該距離L1が許容範囲内であるか否かを判定し、当該距離L1が許容範囲内でないと判定した場合に、所定の重欠陥処理を実行する。
(もっと読む)
パンタグラフ監視装置
【課題】列車の屋根上を撮影した画像を解析して、パンタグラフのホーンの折れの有無を検出することを可能としたパンタグラフ監視装置を提供する。
【解決手段】列車の屋根上を撮影する監視カメラと、監視カメラによって撮影された入力画像を画像処理することによりパンタグラフの状態を監視する画像処理装置とを備えたパンタグラフ監視装置において、画像処理装置が、入力画像上のホーンに対して設定される複数の検査点に基づいてパンタグラフのホーンを検査直線として抽出する検査直線設定部5hと、検査直線と予め設定する基準直線との間の検査角度を算出する検査角度計算部5iと、検査角度に基づいてホーンの折れの有無を判断するホーン折れ判断部5jとを備える構成とした。
(もっと読む)
端子圧着不良検出装置
【課題】 端子取付部の画像を撮影して端子圧着不良の検出を行うに当たって、画像の位置調整の処理を簡単化する。
【解決手段】 端子付き電線4を移動させたまま端子部の画像データをカメラ2で撮影し、取得した画像データについて、所定の枠内において、電線を横切る方向に、複数回平行に走査して各ライン毎に輝度の重心点を求め、各重心点に基づいて第1の座標軸を決定する。また、前記画像データ全体について、電線を横切る方向に、複数回平行に走査してライン毎に、隣接する画素間の輝度の差を積算して、積算値の変化パターンを生成し、該変化パターンを前記第1の座標軸方向に移動させながら、基準パターンと比較し、最も一致する位置に基づいて、前記第1の座標軸と直交する第2の座標軸を決定する。そして、両座標軸を基準として前記画像データの位置を調整し、端子圧着状態の良否判定を行う。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】複数の画像を対象とした対応点の探索処理における精度の維持と速度の向上とを両立させることが可能な対応点探索技術を提供する。
【解決手段】次の処理が行われる。第1画像の第1領域が第1周波数成分情報に変換されるとともに、第2画像の第2領域が第2周波数成分情報に変換される。第1および第2周波数成分情報に基づき、第1領域と第2領域との相関を示す第1相関値が算出される。第1相関値に基づき、相関演算部での演算における周波数成分情報の使用が制限される周波数の使用制限範囲が設定される。第1画像に対応する第3画像の第3領域が第3周波数成分情報に変換されるとともに、第2画像に対応する第4画像の第4領域が第4周波数成分情報に変換される。第3および第4周波数成分情報のうちの使用制限範囲外の周波数に係る周波数成分情報に基づき、第3領域と第4領域との相関を示す第2相関値が算出される。
(もっと読む)
コンクリート画像抽出方法
【課題】背景や障害物を含むコンクリート構造物の画像から、誤差となるコンクリート面以外の背景や障害物を除去すること。
【解決手段】コンクリート構造物の色と同じ色であって、コンクリート構造物のテクスチャと同じテクスチャの画素をコンクリート候補領域として構造物抽出部131で抽出し、Cannyエッジ抽出法を用いてコンクリート候補領域から当該コンクリート候補領域内に前景として存在する障害物のエッジを抽出し、コンクリート候補領域内の各画素の輝度値を用いて中央画素に対する16個の近傍画素のテクスチャ量Skをそれぞれ計算し、最大のテクスチャ量を有する近傍画素が位置k=9にあって、16個のテクスチャ量の分散値が0.0001以上である場合に、当該中央画素をコンクリート領域として抽出し、モルフォロジーのDilation領域拡大法を用いてコンクリート領域を障害物のエッジに到達するまで拡大する。
(もっと読む)
3次元形状検査方法
【課題】極性マークの位置を正確に把握して極性検査をより容易で正確に実行することのできる3次元形状検査方法を提供する。
【解決手段】3次元形状検査のために、測定対象物としてプリント回路基板のベース基板上に形成された所定の検査対象部品を選定し(S110)、検査対象部品に対する検査領域を設定した後(S120)、検査対象部品の高さ情報に基づいた3次元形状を取得し(S130)、検査対象部品の基準点を検出し(S140)、検査対象部品に形成された極性マークの基準点に対する相対的な位置情報を確認した後(S150)、基準点に対する相対的な位置情報と測定された検査対象部品の高さ情報を用いて極性マークの位置を検出し(S160)、極性マークの基準点に対する相対的な位置情報と検出された極性マークの位置とを比較して検査対象部品の良否を判断する(S170)。
(もっと読む)
外観検査装置及び外観検査方法
【課題】検査ウインドウを自動的に精度よく設定する。
【解決手段】外観検査装置10は、基板と該基板に実装されている部品とを備える被検査体12を撮像して得られる被検査体画像を使用して被検査体12を検査する。外観検査装置10は、被検査体12にパターンを投射する投射ユニット26と、パターンが投射された被検査体12のパターン画像に基づいて被検査体12の表面の高さ情報を生成する高さ測定部32と、高さ情報を用いて特定される被検査体画像上での部品の配置に基づいて被検査体画像に検査ウインドウを設定する検査データ処理部34と、を備える。
(もっと読む)
照明灯検出方法
【課題】駅構内等の天井部等に設置された多数の照明灯の撮影画像に基づき各々の存在を正確に検出し、照明灯の自動清掃システムを実現できる照明灯検出方法を提供する。
【解決手段】この照明灯検出方法は、照明灯を可視光カメラ22によって撮影し画像データを得るステップS11と、二次元画像領域で任意な線33を設定し線上の複数画素に係る画像データを取り出し、画像データの中から輝度極大値に係る画素を検出し、この画素を初期検索位置に設定するステップS12と、初期検索位置を基準とし、検索範囲を設定し、画像データから照明灯候補の画素を検出するステップS13と、擬似形状画素を算出し、この擬似形状画素による擬似形状と照明灯候補画素とを比較して照明灯であるか否かを判断するステップS14を有する。
(もっと読む)
タイヤ形状検査方法、及びタイヤ形状検査装置
【課題】凹凸マーク上に重なるように凹凸欠陥が存在する場合にも、本来の凹凸マークの高さ分だけを差し引いて凹凸欠陥のみの高さを算出・取得する。
【解決手段】サンプルタイヤのサイドウォール面の二次元画像であるサンプル原画像において、凹凸マークの輪郭である境界線を検出し、境界線の位置を示すマスク画像を生成するマスク画像生成工程と、サンプル原画像において、マスク画像に示された境界線の位置に対応する領域を除き、残りの領域の高さを離散的な複数の高さ閾値を用いて分類することで得られる高さオフセット画像を生成する高さオフセット画像生成工程と、検査タイヤのサイドウォール面の二次元画像である検査画像から、高さオフセット画像を差し引くと共に、マスク画像が表す境界領域を除去する差分処理工程とを経て、差分処理工程の結果として得られた凹凸除去画像に基づいて、検査タイヤのサイドウォール面の形状欠陥を検査する。
(もっと読む)
ステレオ映像内の視差探索範囲を求めるための方法及びシステム
【課題】シーンのステレオ画像のセットに基づいて該シーンの現在のステレオ画像のための視差探索範囲を求めるためのシステム及び方法を提供する。
【解決手段】ステレオ画像のセットからステレオ画像のサブセットを選択するステップであって、該サブセットは現在のステレオ画像及び少なくとも1つの隣接するステレオ画像を含み、該隣接するステレオ画像は現在のステレオ画像に時間的に隣接する、選択するステップと、ステレオ画像のサブセット内のステレオ画像毎に視差ヒストグラムを求めるステップであって、1組の視差ヒストグラムを形成する、求めるステップと、1組の視差ヒストグラム内の視差ヒストグラムの重み付けされた和として重み付け視差ヒストグラムを求めるステップと、重み付け視差ヒストグラムから視差探索範囲を求めるステップとを含む。
(もっと読む)
61 - 80 / 311
[ Back to top ]