
Fターム[2F065QQ36]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | ウィンドウ発生 (311)
Fターム[2F065QQ36]に分類される特許
41 - 60 / 311
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
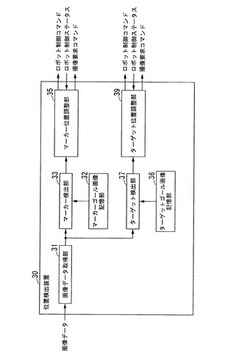
【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
画像処理方法、プログラム、および画像処理装置

【課題】計測時の手間を低減する。
【解決手段】CPU34cは、ブレードを撮像した動画像を構成する第1のブレード画像からテンプレート画像を抽出する。CPU34cは、第1のブレード画像とテンプレート画像とを比較し、第1のブレード画像の中から、テンプレート画像におけるブレードの姿勢と一致する姿勢のブレードを含む第2のブレード画像を抽出する。CPU34cは、予め算出された3次元形状を有する物体の画像をテンプレート画像に重畳した第1の画像を表示部に表示し、テンプレート画像におけるブレードの姿勢に一致するように、第1の画像における物体の姿勢を制御する。CPU34cは、この物体の画像を第2のブレード画像に重畳した第2の画像を表示部に表示する。CPU34cは、第2の画像における物体上の計測点の3次元座標を算出し、算出した3次元座標に基づいて、物体のサイズを算出する。
(もっと読む)
画像処理装置および画像処理方法
【課題】高密度の視差情報の導出を安価な低処理能力の計算機で実現する。
【解決手段】画像処理装置120は、現在より過去における1または複数回分の視差を示す視差情報を保持するデータ保持部152と、光軸を異にして撮像された2つの画像データを取得する画像取得部150と、2つの画像データのうち予め定められたいずれか一方の画像データの任意の画像位置における基準部分画像に対応する、他方の画像データの対応部分画像の探索範囲を、任意の画像位置に関連付けて保持された過去における視差情報に示された視差に基づいて決定する探索範囲決定部160と、決定された他方の画像データの探索範囲から対応部分画像を探索する部分画像探索部162と、任意の画像位置と探索された対応部分画像の画像位置とから視差を導出し、視差を示す視差情報を、任意の画像位置に関連付けてデータ保持部に保持させる視差導出部164とを備える。
(もっと読む)
対象物検出装置及び方法
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
立体形状認識装置
【課題】認識精度を高く維持しつつ処理を軽くする。
【解決手段】複数方向から照明光を照射する照明手段2と、対象物を撮像する撮像手段1と、これらの制御部120とを備え、照度差ステレオ法を用いて、複数の撮像画像データとそれぞれの照射方向とから撮像画像を構成する画素ごとに法線ベクトルを算出する立体形状認識装置10において、撮像画像を構成するそれぞれの画素について、複数の撮像画像データの同じ位置の画素における複数の輝度値を、予め定めた絞り込み条件に従って絞り込む選出部21と、撮像画像を構成するそれぞれの画素について、選出部により絞り込まれた同じ位置の画素における複数の輝度値に基づいて法線ベクトルを算出する算出部22とを備ている。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
3次元位置計測システム、3次元位置計測装置および3次元位置計測方法
【課題】対象物の模様の方向に寄らずに安定した距離計測を行う。
【解決手段】カメラと3次元位置計測装置を備える。カメラは、移動体の移動に伴い回転する物体に取り付けられる。3次元位置計測装置は、記憶部と3次元位置計測部を備える。記憶部は、カメラで撮影された画像と、該複数の画像を各々撮影した時刻と同時刻のカメラ回転位置とを対応づけて記憶する。3次元位置計測部は、対象物の模様に対して、複数の画像から、模様の方向とは異なる方向に基線方向を与えるカメラ回転位置の少なくとも2つの画像を選択して、対象物の3次元位置を計測する。
(もっと読む)
3次元情報取得方法、3次元情報取得装置、および3次元情報取得プログラム
【課題】被写体を2次元で表現する画像に基づき被写体の3次元空間内における奥行きを示す3次元情報の検出精度を高めること。
【解決手段】3次元の対象物を2次元で表わす画像の画像データを入力する画像入力ステップと、前記画像データに基づき前記画像の特徴量を示す特徴量情報を、前記画像を複数個に分割した分割エリア毎に取得する特徴量取得ステップと、3次元の対象物を2次元で表わす画像内における任意のサンプリングポイント毎に、当該サンプリングポイントの画像の特徴量を示すサンプリングポイント特徴量情報と、仮想3次元空間において前記対象物を表現した場合の前記サンプリングポイント同士の水平方向の間隔を示す3次元情報とをそれぞれ対応付ける3次元情報テーブルを参照して、前記特徴量情報が示す前記分割エリアの画像の特徴量と対応する前記3次元情報を取得する3次元情報取得ステップと、を含むことを特徴とする。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
基板検査方法
【課題】複数の投影部を通して測定対象物が形成された基板を検査する基板検査方法を提供する。
【解決手段】複数の投影部を通して測定対象物が形成された基板にパターン照明を順に照射して基板に対する投影部別位相データを取得する(S110)。以後、投影部別位相データを用いて基板に対する投影部別高さデータを抽出する(S120)。その後、各投影部別で投影部別高さデータを用いて抽出された高さデータの傾きを補正する(S130)。その後、傾き補正が完了した投影部別高さデータを整列させ(S140)、整列された高さデータを用いて統合高さデータを抽出する(S150)。このように、複数の投影部から抽出された高さデータを整列させる前に各投影部別に測定された高さデータに対する傾きを補正することによって、統合高さデータの信頼性を向上させることができる。
(もっと読む)
検査方法
【課題】本発明は検査方法に関わり、より詳細には形状測定装置の測定対象物に対する検査方法を提供する。
【解決手段】基板を検査する検査装備において検査領域を設定するために、基板上に複数の測定領域を設定し、測定領域のうち測定対象物を検査するためのターゲット測定領域と隣接する少なくとも一つ以上の隣接測定領域の基準データ及び測定データを獲得した後、隣接測定領域内で少なくとも一つ以上の特徴客体を抽出する。特徴客体に対応する基準データと測定データとを比較して、歪曲量を獲得し、歪曲量を補償してターゲット測定領域内の検査領域を設定する。これにより、基準データと測定データとの間の変換関係をより正確に獲得することができ、歪曲を補償した正確な検査領域を設定することができる。
(もっと読む)
屋外地物検知システム、屋外地物検知システム用プログラム、および屋外地物検知システム用プログラムの記録媒体
【課題】レーザ測量結果である点群と、指定された1枚のカメラ画像とに基づいて、対象となる地物に含まれる点群を特定し、特定した点群から地物の位置と大きさを検知する。
【解決手段】対象となる地物周辺の画像を格納するカメラ画像データ格納部(31)と、対象となる地物周辺のレーザ測量結果を点群として格納する点群データ格納部(32)と、対象となる地物周辺の画像をモニタ上に表示させる画面描画部(21)と、対象となる地物周辺の画像の中から地物の領域内に含まれる少なくとも1点を指定する点指定部(12)と、少なくとも1点に基づいて画像上の地物の領域を決定し、決定した領域に含まれる点群を点群データ格納部から抽出し、点群間の距離が一定距離以下のもの同士をグルーピングすることで地物に対応する点群を分離し、地物領域の位置と大きさを検知する地物検知処理部(22〜25)とを備える。
(もっと読む)
管端開先加工部の検査方法及び装置
【課題】 管端部の開先加工部の表面健全性を速やかに検査する。
【解決手段】 暗空間形成容器内側の暗空間に、検査対象管1の管端部に設けた開先加工部2を配置し、照明装置で照明された周方向の一部におけるルート面3と開先面4のR部分4a及び斜面部分4bを、撮影装置で一緒に撮影する。得られた画像9上の開先加工部2のルート面3と開先面4のR部分4aと斜面部分4bに対応する個所に、それぞれの明るさの差を基に、ルート面用計測領域10aと開先面R部分用計測領域10bと、開先面斜面部分用計測領域10cを設定する。各計測領域10a,10b,10cについて個別のコントラスト変換を行い、個々の濃淡変化、色の濃さが、予め正常な表面健全性を備えた開先加工部を有する管について同処理を実施したときの濃淡の変化、色の濃さの基準値に比して或るしきい値を越えると、開先加工部2における表面健全性に不良があると判定させる。
(もっと読む)
非接触三次元計測装置及び非接触三次元計測方法
【課題】表面に何ら特徴のない物体についても高速に非接触で三次元形状計測を可能にする非接触三次元計測装置及び非接触三次元計測方法を提供する。
【解決手段】非接触三次元計測装置は、互いに距離をおいて配置され、被計測物を撮影する第1及び第2のカメラと、被計測物にラインレーザを照射するラインレーザとを備え、第1及び第2の画像20、30で、ラインレーザが撮影された部分を含む矩形領域を第1対象領域26及び第2対象領域36として選択し、ラインレーザが撮影された部分を第1線分データ22及び第2線分データ32として抽出し、第1線分データ22の中の一つの点を特徴点24として選択し、選択した特徴点24に対応するエピポーラ線を第2対象領域36内に計算して、第2線分データ32とエピポーラ線との交点を、特徴点24と対応する対応点34として決定し、被計測物上の該当点の三次元座標を算出する。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び電子装置
【課題】情報処理装置とユーザとの距離に拘らず、違和感なく情報処理装置を操作できるようにする。
【解決手段】肌領域検出部61は、画像上からユーザの肌を表す肌領域を検出し、特徴点抽出部62は、肌領域の特徴点を抽出し、距離算出部63は、肌領域に基づいて、ユーザまでの距離を算出し、座標変換部46は、距離に応じて、特徴点を所定の座標空間上の座標点に変換するための変換係数を決定し、決定した変換係数に基づいて、特徴点を所定の座標空間上の座標点に変換する。本発明は、例えば、撮像された画像から、ユーザの肌領域を検出する検出装置に適用できる。
(もっと読む)
点群位置データ処理装置、点群位置データ処理システム、点群位置データ処理方法、および点群位置データ処理プログラム
【課題】オクルージョンが解消される新たな視点の位置を決めるための情報を作業者に提供する技術を提供する。
【解決手段】測定対象物の点群位置データを取得する点群位置データ取得部111、測定対象物の画像データを取得する画像データ取得部112、第1の視点において取得された点群位置データと第1の視点とは異なる第2の視点において取得された画像データとの対応関係を求める対応関係特定部113、点群位置データから三次元モデルを形成する三次元モデル形成部114、この三次元モデルを画像表示装置に表示するための制御を行う三次元モデル表示制御部115を備えている。ここで、三次元モデル形成部114は、対応関係特定部113で特定された対応関係に基づき、第2の視点から見た向きの三次元モデルを形成する。この第2の視点から見た三次元モデルが作業者に画像として提示される。
(もっと読む)
情報処理装置及びその制御方法、プログラム
【課題】 自己オクルージョンが存在する環境においても、複数の撮影画像を用いて3次元空間内の対象物体の位置姿勢を高精度かつ安定的に推定するための技術を提供する。
【解決手段】 3次元空間内の対象物体の位置姿勢を推定する情報処理装置であって、複数の撮影位置から対象物体を撮影して得られた複数の撮影画像を入力する入力手段と、入力された複数の撮影画像の各々から、3次元空間内の所定の部分空間が占める領域に対応する部分画像を切り出す切出手段と、複数の撮影画像からそれぞれ切り出された複数の部分画像の特徴を示す特徴情報を、当該複数の部分画像から抽出する抽出手段と、物体の位置姿勢と、当該位置姿勢に対応する当該物体の特徴情報とを関連づけて示す辞書情報を記憶する記憶手段と、抽出手段が抽出した対象物体の特徴情報と、辞書情報に示される特徴情報とを比較して、該対象物体の位置姿勢を推定する推定手段とを備える。
(もっと読む)
画像処理装置及び外観検査方法
【課題】 安定的に検査領域を特定することが可能な画像処理装置及び外観検査方法を提供する。
【解決手段】 濃淡画像を取得する濃淡画像取得手段110と、距離画像を生成する距離画像生成手段130と、濃淡画像と距離画像の一方の画像において、他方の画像上で検査範囲に相当する検査領域を特定するための特定パターンを検出する特定パターン検出手段150と、濃淡画像と距離画像の他方の画像において、特定パターン検出手段により検出された特定パターンの位置及び傾斜角度の少なくとも一方に基づいて、検査領域を特定する検査領域特定手段170と、特定された検査領域から特徴量を算出する特徴量算出手段180と、算出された特徴量に基づいて、ワークの良否を判定する判定手段190と、を備える。
(もっと読む)
マーク読み取り装置、および方法
【課題】特に、布片に付されたマークを十分な精度で認識できるマーク読み取り装置、および方法を提供する。
【解決手段】布片Tを撮影するカメラ11と、撮影した布片画像を処理する画像処理装置とを備える。布片画像の明度勾配方向θを演算し、あらかじめ記憶された複数種類のテンプレート画像のうち、布片画像の明度勾配方向θに一番近似する明度勾配方向を有するテンプレート画像に対応する種類を、布片Tの種類と判断する。織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。布マークを十分な精度で認識し、布片の種類や表裏を識別することで、その結果を基に布片のハンドリング方法を決定することができる。
(もっと読む)
電線の異常検出方法、異常検出装置、および異常検出プログラム
【課題】例えば自走式電線点検装置を使用したビデオ映像に適した処理を行う。
【解決手段】撚られた複数の素線が表面に露出している電線に沿って撮像手段を移動させながら撮影した電線の複数の連続画像に基づいて電線の異常を検出する異常検出方法において、複数の連続画像4のうち、1枚の基準画像中の基準となる素線境界の位置情報及び素線の幅情報の入力を受け付け記憶する初期値設定処理(ステップS43)と、連続画像の各々について素線の境界を検出して素線表面画像を切り出す画像切り出し処理(ステップS44,S45)と、素線表面画像中の素線の表面の明るさの変化に基づいて素線の異常を検出する異常検出処理(ステップS46〜S48)を備えている。
(もっと読む)
41 - 60 / 311
[ Back to top ]