
Fターム[2F065QQ41]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372)
Fターム[2F065QQ41]の下位に属するFターム
Fターム[2F065QQ41]に分類される特許
521 - 527 / 527
光波散乱測定データに基づいてプロセスパラメータ値を決定する方法
一実施形態による方法には、あるキャリブレーション基板上に設けられた複数のマーカ構造体の組から、光学的検出装置によりキャリブレーション測定データを得るステップが含まれる。各マーカ構造体の組は、プロセスパラメータの異なる既知の値を用いて生成された、少なくとも1つのキャリブレーションマーカ構造体を含む。この方法には、基板上に設けられ、プロセスパラメータの未知の値を用いて露光される少なくとも1つのマーカ構造体から光学的検出装置を用いて測定データを得るステップと、プロセスパラメータの既知の値およびキャリブレーション測定データに基づくモデルにおいて回帰係数を用いることにより得られた測定データからプロセスパラメータの未知の値を決定するステップとを含む。  (もっと読む)
(もっと読む)
偏向器システムにおいてマークの位置を測定するための方法
本発明は、偏向器システムにおいて任意の形状のパターンの座標を決定するための方法に関する。この方法は、基本的に、前記パターンを第1の方向Xへと移動させる工程と、前記パターンのエッジの位置の計算を、垂直な方向Yに実行されるマイクロ・スイープの数を前記エッジが検出されるまでカウントすることによって行う工程と、前記座標の決定を、カウントされたマイクロ・スイープの数を前記パターンの前記移動の速さに関係付けることによって行う工程とを含む。また、本発明は、この方法を実装するソフトウェアに関する。  (もっと読む)
(もっと読む)
プリントされたはんだペーストの欠陥を検出するためのシステムおよび方法
基板上に堆積された物質の画像を分析する方法であって、画像は複数の画素を含み、この方法は、画像内で興味の対象となる領域を規定するステップと、第1および第2の垂直な軸に、興味の対象となる領域を関連付けるステップとを含み、画像内の1組の画素は、第1の軸に沿って位置し、この方法はさらに、興味の対象となる領域内の画素を、第1の軸にアライメントされかつ第2の軸に沿って突出する一次元アレイに変換するステップと、一次元アレイに少なくとも1つのしきい値を適用するステップとを含み、しきい値は、予め定められた限度に少なくとも部分的に基づく。 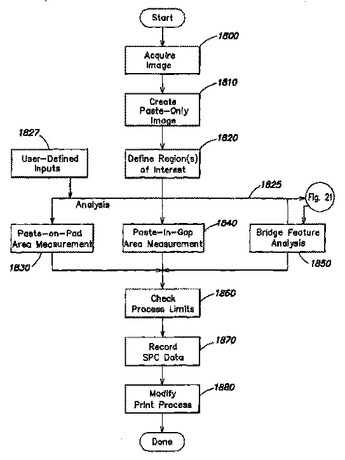 (もっと読む)
(もっと読む)
位置検出方法、露光方法、位置検出装置、露光装置及びデバイス製造方法
パラメータの自由度が小さいモデルM’のAIC(M’)と、パラメータの自由度が大きいモデルMのAIC(M)との小さい方をEGAのモデルとして選択する(ステップ502)。モデルMが選択され、その残差が所定値以上である場合には、モデルMよりもパラメータ自由度が大きいすべての係数がパラメータであるモデルが選択される。有効サンプル数が、このモデルでのパラメータ自由度よりも小さい場合には、有効サンプル数を増やし、さらにサンプルショットを追加計測する。今回選択されたモデルの係数を、次回のウエハアライメントの際の事前知識に反映する(ステップ524)とともに、今回のモデルのパラメータの自由度に応じて、有効サンプル数を増減させる(ステップ508又はステップ518)。 (もっと読む)
三次元物体を走査するための装置
物体の三次元モデルを構築するための走査システム及び方法であって、走査システムは走査装置(2)と走査テンプレート部材(4)とを含む。走査装置(2)は光を投影するためのエミッター(20)と像を撮像するためのセンサー(22)とを有し、エミッターとセンサーが使用時に相対的に固定された位置に配置される。走査テンプレート部材(4)は既知の二次元テンプレート(42)を有する。処理手段は、データを生成して走査装置(2)と走査テンプレート(42)との間に配置された物体(8)の三次元モデルを構築することができ、使用時に走査テンプレート(42)に対する物体(8)の情報を生成し、この情報はエミッターによって投影光が投影される同一の像から生成される。測定は同一の基準面に対して行われる。 (もっと読む)
立体カメラセットを有する走査システム
走査システムは、対象物(40)の定性的及び定量的不規則性を検出する1以上の立体カメラ(10)を有する。各立体カメラセット(10)は、2つのカメラ(12,14)と投影器(16)とを有する、各カメラ(12,14)は、CCDマトリックス配列(18)の配列不良による歪みと光学システムの欠損とを補正するために較正される。投影器(16)は、測定されるべき対象物(40)に絶対符号パターン(32,34,36)を投影し、赤外、可視、紫外スペクトルの電磁気エネルギーを放射可能である。複数のカメラセット(10)は、3次元空間(26)の対象物(40)の不規則性を検出可能な走査システムマトリックス(42,44)と結合され得る。3次元空間(26)は、立体カメラセット(10)の数に応じて、任意の所望の寸法であり得る。カメラ(12,14)からのデータは、測定の表示用にデジタル信号プロセッサ(66)を介してコンピュータインターフェース(64)に送信される前に、ゲートアレイ(62)により予備処理される。結果的に、送信されるデータ量は、簡素化され、従って動作時間を減少させ、走査システムが非常に短い時間で対象物(40)の不規則性を非常に正確に測定することを可能にする。 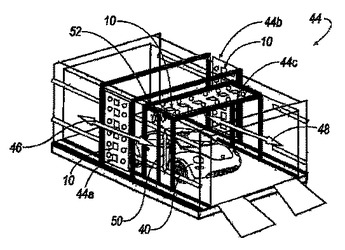 (もっと読む)
(もっと読む)
透明膜の段差の測定方法及び位相シフトマスクの作成方法
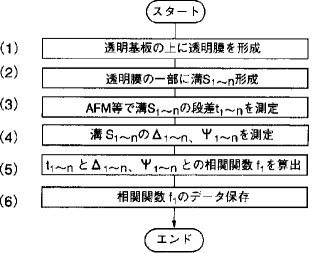
【課題】透明膜の段差の測定方法に関し、非接触、非破壊で且つ簡単な操作で高速、高精度に位相シフターの段差を測定すること。
【解決手段】第1の透明膜1の一部に形成された複数の第1の溝Sa1 ,…,San の段差量t1 ,….tn と該第1の溝Sa1 ,…,San からの反射光の偏光状態を示すパラメータの値との相関関係f1 を求めてデータベース化した後に、第2の透明膜42の一部に形成された第2の溝45の反射光の偏光状態を示すパラメータの第1の値を計測して、該第1の値と前記データベースの前記相関関係に基づいて該第2の溝45の第1の段差量を求める工程を含む。
(もっと読む)
521 - 527 / 527
[ Back to top ]