
Fターム[2F065QQ44]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372) | 周波数分析 (101)
Fターム[2F065QQ44]に分類される特許
1 - 20 / 101
表面処理状況モニタリング装置
検査装置
【課題】暗視野方式の検査装置などにおいて、信号を実測しながら検査条件を決める方法では時間がかかることと、設定した感度条件が適切か否かの判断が作業者の裁量に左右されることが課題である。
【解決手段】検査装置において、試料を保持するステージと、前記ステージ上に保持された試料の表面に照明光を照射する照明光学系と、前記試料に照射された照射光によって発生した散乱光を検出する暗視野光学系と、前記暗視野光学系にて検出された散乱光を電気信号に変換する光電変換部と、前記光電変換部によって変換された電気信号をデジタル信号に変化するAD変換部と、前記試料表面上の異物からの散乱光の大きさから異物の大きさを判定する判定部と、前記試料面からの散乱光情報を用いて、検査条件を決定する信号処理部とを有する。
(もっと読む)
高さ測定装置及び高さ測定方法

【課題】鏡面性を持つ試料の各位置の高さを正確に求めることができる技術を提供する。
【解決手段】撮像部2は、例えば所定のフレームレートで、試料Sの画像である試料画像を撮像する。輝線抽出部は、撮像部2により順次に撮像された試料画像から輝線を抽出し、所定の基準高さ及び基準傾きを示す基準輝線に対する各輝線のずれw(x)を求める。高さ算出部は、w(x)=2L・(d/dx)・d(x)+2sinθ・d(x)に、輝線抽出部により抽出された輝線のずれw(x)を代入することで、基準高さからの試料Sの高さd(x)を順次に算出する。
(もっと読む)
半導体ウェハの表面検査システム
【課題】より小型または簡単な構成で、より精度よく、半導体ウェハの表面に存在するソーマークの検出又は大きさの測定を行うことが可能な技術を提供する。
【解決手段】半導体ウェハWの表面に対して斜め方向から、入射面において平行光である光を照射し、ラインセンサカメラ3、4で半導体ウェハWの表面におけるライン状の領域3aを撮影する。このことで、半導体ウェハWの表面からの照射光の反射光または散乱光を検出し、この強度に基づいて、半導体ウェハWの表面における線状の凹凸を検出し、またはその大きさを測定する。光源装置1、2によって、ラインセンサカメラ3、4によって撮影されるライン状の領域3aのラインに平行な方向から光を照射し、線状の凹凸の方向がラインの方向に直交するように配置された状態で、半導体ウェハWの線状の凹凸を検出し、またはその大きさを測定する。
(もっと読む)
路面分析
【課題】車両が走行しようとする路面を分析し、車両の安全性および制御を向上させる。
【解決手段】システム10は、シリコン網膜11のようなAERカメラを用いる。このシリコン網膜11を用いて、走行しようとする路面をモニタリングする。そして、処理ユニット12が、そのシリコン網膜によって提供された信号に基づいて、路面を分析する。路面分析方法は、上記のシステム10によって実行され、従来の分析方法を凌駕するものである。
(もっと読む)
温度計測システム、基板処理装置及び温度計測方法
【課題】光干渉を利用して温度を適切に測定することができる温度計測システム、基板処理装置及び温度計測方法を提供する。
【解決手段】温度計測システム1は、光源10、分光器14、光伝達機構11,12、光路長算出部16及び温度算出部20を備える。光源10は、測定光を発生させる。光伝達機構11,12は、測定対象物13の表面13a及び裏面13bからの反射光を分光器14へ出射する。分光器14は、反射光の強度分布である干渉強度分布を測定する。光路長算出部16は、フーリエ変換し光路長を算出する。温度算出部20は、光路長と温度との関係に基づいて測定対象物13の温度を算出する。光源10は、分光器14の波長スパンΔwに基づいた条件を満たす半値半幅Δλの光源スペクトルを有する。分光器14は、波長スパンΔwと計測最大厚さdとに基づいた条件を満たすサンプリング数Ncで強度分布を測定する。
(もっと読む)
測定装置、形状測定装置、形状測定方法、及び構造物の製造方法
【課題】凹部の内側の情報に関する測定精度を向上させる。
【解決手段】形状測定装置は、撮像素子5と、複数の光学素子を含み、撮像素子5と共役な共役面10を、複数の光学素子の配列方向に対して鋭角または鈍角の関係となるように形成する結像光学系6と、測定対象面に対して結像光学系6の少なくとも一部を移動可能な走査部と、走査部の位置情報及び撮像素子5の画像情報に基づいて、測定対象面の位置情報を取得する位置情報取得部と、を備える。
(もっと読む)
光学測定装置、光学測定方法および同測定方法を用いた光学フィルムの製造方法
【課題】同じ測定箇所で位相差値と厚みデータとを測定することで、複屈折や厚み方向位相差値Rthをより精度よく得ることができる光学測定装置を提供する。
【解決手段】光学測定装置Mは、光学フィルムSに光L1を入射する投光器30と、投光器30から光学フィルムSに入射された入射光L1を受光する受光器34と、受光器34によって受光された透過光L1から光学フィルムSの面内位相差値R0を算出する位相差R0算出部11と、位相差R0算出部11で面内位相差値R0を算出するのに用いた入射光L1と同じ入射光L1を用いて光学フィルムSの厚みデータdを算出する厚み算出部12とを備えている。受光器34は、2つのファイバ部8a,8bに分岐される光ファイバ8を含んでおり、一方のファイバ部8aが位相差R0算出部11に接続され、他方のファイバ部8bが厚み算出部12に接続されている。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
接触面積測定装置および接触面積測定方法
【課題】新規な接触面積測定装置を提供することを目的とする。
【解決手段】接触面積測定装置は、試料7に接する光透過性基板6と、前記試料7とは反対側から、前記光透過性基板6に光を照射する照射手段と、前記試料7からの反射光と前記光透過性基板6からの反射光とから生じる干渉画像を取得する干渉画像取得手段12と、前記干渉画像の輝度値情報を補正処理し、得られた補正輝度値情報から輝度値ヒストグラムを作成する輝度値ヒストグラム作成手段14と、前記輝度値ヒストグラムから接触面積を算出する接触面積演算手段15を有し、前記補正処理は、割り算演算を有する式により、補正画像輝度を算出する。ここで、補正画像輝度は、式(補正画像輝度=(対象画像輝度/参照画像輝度)×定数)により算出することが好ましい。また、参照画像輝度は、荷重ゼロ時の元画像に対し、ガウスぼかしフイルター処理して求めることが好ましい。
(もっと読む)
画像処理装置、画像処理装置の制御方法、距離計測装置、およびプログラム
【課題】パターン投影と簡便な画像処理で多重反射光領域の検出を行うことにより、多重反射によるノイズの影響を低減することを目的とする。
【解決手段】投影部によりエピポーララインと略平行な方向のラインパターンが投影された撮像対象物を撮像する撮像部と、撮像された画像からラインの方向を算出するライン方向算出部と、ラインの方向と、投影部と撮像部との相対的な位置関係を示す幾何配置に基づいて決定されるエピポーラライン方向との角度差に基づいて多重反射光領域を検出する検出部と、を備える。
(もっと読む)
形状計測装置および形状計測方法
【課題】1つのカメラの視野に入らない計測対象物の裏側の形状まで精度良く計測する装置および方法を提供する。
【解決手段】計測対象物に格子模様を投影する格子模様投影部と、計測対象物の周囲に配置された少なくとも1つの鏡と、計測対象物および鏡に映る計測対象物の鏡像の画像を撮影する少なくとも1つの撮影部と、計測対象物の画像と鏡像の画像の各々に対して位相解析処理を施して計測対象物の形状を算出するとともに撮影された前記計測対象物の画像と前記鏡像の画像とを合成する解析処理部とを備え、撮影部の各々は、計測対象物の少なくとも一部の領域と該少なくとも一部の領域の鏡像とを同時に撮影可能に配置されていることを特徴とする。
(もっと読む)
表面形状の評価方法および評価装置
【課題】第1表面に対向する第2表面による反射像の影響を受けずに被評価物体の表面形状を精度よく評価することができるようにする。
【解決手段】評価装置は、評価対象である板ガラスなどの被評価物体3の表面3aに映し出されたストライプパターン1を、CCDカメラ2によって撮像するように構成されている。ストライプパターン1は、光源の発光面に設けられている。また、光源が発射する光の波長は、200〜380nmである。CCDカメラ2によって撮像された画像は、演算装置としてのコンピュータ4に取り込まれ、コンピュータ4によって画像解析が行われる。
(もっと読む)
クロストーク補正係数算出方法およびクロストーク補正係数算出装置およびこれを用いた三次元表面形状測定装置
【課題】 複数波長による表面形状の測定方法およびこれを用いた装置によって測定する場合に発生するクロストーク現象のクロストーク補正係数を算出する。
【解決手段】 測定対象面の平面領域内から輝度の異なる6点以上の干渉輝度信号を取得し、前記輝度信号に干渉縞モデルとクロストークモデルとの組み合わせを適合(フィッティング)することにより、クロストーク補正係数を一括して算出するクロストーク補正係数算出方法、また、該方法を実行できる装置を提供する。
(もっと読む)
画像処理装置、方法およびそのプログラム
【課題】2次元画像からより正確な奥行きを生成する。
【解決手段】実施の形態によれば、検出部は、画像に含まれる物体を検出する。選択部は、検出された物体の性質に応じて物体の奥行きの情報のベースとするデプスモデルを選択する。セグメント部は、検出された物体の領域を画像から区分する。デプスマップ生成部は、画像の奥行きを表現するデプスマップを生成する。この際、デプスマップ生成部は、画像中の検出された物体の位置に対応するデプスマップ上の位置に、デプスモデルを配し、配されたデプスモデルの領域と物体の領域とを比較し、互いに重なり合わない位置に対して、補正後の奥行値を与える。
(もっと読む)
表面評価装置
【課題】ワーク表面等の微小凹凸の密集度合を定量的に評価することができる表面評価装置を提供する。
【解決手段】シリンダボア2表面の凹凸データに基づいてシリンダボア2表面を評価する表面評価装置20において、前記シリンダボア2表面の凹凸データをフーリエ変換して周波数スペクトルを求める手段と、前記周波数スペクトルから所定のしきい値に基づいて周波数成分を抽出する手段と、前記抽出された周波数成分を逆フーリエ変換して凹凸データに復元する手段と、前記復元された凹凸データから所定のしきい値に基づいて凹凸座標データを抽出する手段と、前記凹凸座標データより座標の数と座標値の分散を求める手段と、前記座標値の分散よりシリンダボア2表面品質を評価する手段と、を有する。
(もっと読む)
表面評価装置
【課題】ワーク表面の凹凸状態をパワースペクトルの全座標点データを用いて定量的に評価することができる表面評価装置を提供する。
【解決手段】ワーク表面の凹凸データに基づいてワーク表面を評価する表面評価装置10において、前記ワーク表面の凹凸データをフーリエ変換してパワースペクトルを求める手段と、当該パワースペクトルを相互相関関数を用いて数値化する手段と、当該数値化された値の最大値を用いて前記ワーク表面の評価を行う手段と、を有する。
(もっと読む)
白色干渉法による振動測定装置及び振動測定方法
【課題】白色干渉法を用いて、μメートルオーダの高精度で測定対象物の位置を決定し、さらに測定対象物の振動周波数をkHzオーダの高速で検出でき、かつナノメートルオーダの振動変位量を測定できる振動測定装置及び振動測定方法を提供する。
【解決手段】白色光を参照光と測定光に分割する光カプラと、参照光の進行方向を変える光学素子、参照光の進行方向を反転する反射素子、光学素子を往復移動させる直動ステージ及び光学素子の位置を取得するスケールヘッドからなる参照光路長スキャナ部と、測定光を発散又は収束させる集光レンズと集光レンズを移動させるレンズ移動機構からなるセンサ部と、反射して返った参照光と測定光を合成して干渉信号を出力する光検出器と、所定時間取得した干渉信号の強度を高速フーリエ変換処理で解析して、測定対象物の振動周波数及び振動変位量を求める処理装置とからなる振動測定装置の構成とした。
(もっと読む)
空間光パターンに基づく深さデータの生成
空間光パターンに基づいて深さデータを生成するための技術について一般に説明される。いくつかの例では、深さデータを生成する方法が、空間光パターンが投射される1つまたは複数の物体の画像を取得することであって、画像内の空間光パターンのぼやけが深さ方向に単調に増加または減少する、取得することと、対象画素周りの局所画像領域にある画像の空間周波数成分値を算出することと、深さと空間周波数成分値との事前に設定した関係を用いて、算出した空間周波数成分値に対応する深さデータを求めることとを含む。 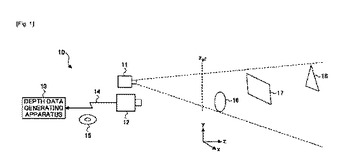 (もっと読む)
(もっと読む)
光ファイバ構造物変位計測装置及びその計測方法
【課題】光ファイバの設置毎に、事前に試験を行う必要がなく、不均一なひずみを有する変位であっても、正確に変位を計測することができる光ファイバ構造物変位計測装置及びその計測方法を提供する。
【解決手段】構造物20は、非直線形状であり、かつ変位が発生した場合に不均一なひずみが発生する構造物である。構造物20に固定された光ファイバ1に発生するブリルアン散乱光を検出して、ブリルアン散乱光から観測パワースペクトルデータを計測する。一方、構造物の変位の大きさに対応して発生するブリルアン散乱光のモデルパワースペクトル形状を理論的に算出し、このモデルパワースペクトル形状を観測パワースペクトルデータにあてはめる。あてはめられた最も適合する曲線形状のモデルパワースペクトル形状に基づき、構造物の変位を算出する。
(もっと読む)
1 - 20 / 101
[ Back to top ]