
Fターム[2F065QQ45]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372) | 一軸への投影 (49)
Fターム[2F065QQ45]に分類される特許
1 - 20 / 49
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
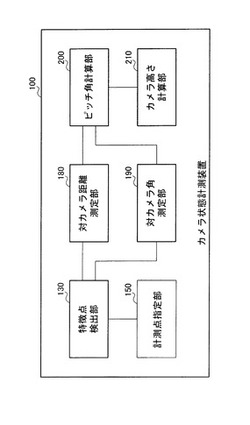
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
列車停止位置の検出方法及び検出装置

【課題】どのような路線に対しても低コストで導入でき、また装置の保守や点検に手間をかけることなく、列車停止位置を正確に検出する。
【解決手段】本発明の列車停止位置Pの検出方法は、停止動作中の列車Tの前面に対してスポット状の測定光2を左右方向に沿ってライン状に走査しつつ照射する距離センサ3を用いて、距離センサ3から列車Tの前面までの距離を測定し、測定された距離に基づいて、列車Tの停止状態及び停止位置を検出する。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
被計測体の表面異常識別装置
【課題】高温の被計測体に発生する酸化スケール等の表面異常を精度良く識別することができる被計測体の表面異常識別装置を提供する。
【解決手段】高温の被計測体5から得られる輻射光を輻射光撮像部18により、被計測体5が一定角度回転される毎に撮像して得た複数の輻射光画像を合成して、合成輻射光画像を作成する画像合成部10と、前記合成輻射光画像から所定領域を抽出して、撮像中の被計測体5の温度低下に基づく前記所定領域の画像の輝度変化を補正する第1輝度補正部12と、前記補正した所定領域の画像から所定暗部を検出し、該所定領域の画像の暗部を前記被計測体の表面異常と判定する異常判定部14と、を備える被計測体の表面異常識別装置1を用いる。
(もっと読む)
段差エッジ推定装置
【課題】撮像手段により取得されるステレオ画像を利用して、階段等の段差部の平坦面部の先端部のエッジの位置及び方向を精度良く推定することを可能とする装置を提供する。
【解決手段】撮像手段3R,3Lにより撮像した2つの撮像画像(ステレオ画像)を用いて段差部(階段)50の段差エッジ52の位置及び方向を推定する。第1の撮像画像に設定した領域における画像の素値分布と、第2の撮像画像の対応領域における画像を平面パラメータに応じて射影変換してなる画像の画素値分布との間の誤差を表す誤差関数を線形結合して構成される評価関数を算出し、この評価関数の値を最小化するように、段差エッジの位置及び方向を表す段差エッジパラメータを探索的に特定する。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、およびプログラム
【課題】影が落ちる領域に相当する画像領域から抽出される擬似的な画像特徴の影響を軽減し、フィッティング/マッチングの安定性・精度を向上する。
【解決手段】対象物体の2次元画像を取得する画像取得部と、対象物体の距離画像を取得する距離画像取得部と、距離画像の計測不能領域を対象物体に照射される照明が遮蔽される被遮蔽領域として抽出する抽出部と、対象物体の位置姿勢の概略値に基づいて3次元モデルを2次元画像上に投影する投影部と、投影された線分を構成する点とエッジを構成する点とを組として対応付ける対応付け部と、エッジを構成する点が被遮蔽領域内に存在するか否かを判定する判定部と、存在する場合の組が位置姿勢計測に用いられる重み係数を、存在しない場合の重み係数よりも小さく設定する設定部と、対応付けられた線分を構成する点とエッジを構成する点との距離に重み係数を乗じた値の総和が最小となる位置姿勢を計測する計測部と、を備える。
(もっと読む)
出力制御装置
【構成】空調装置D_1〜D_6は、部屋RM1の天井HV1に設けられ、部屋RM1に向けて出力を発生する。部屋RM1にはまた、空調装置D_1〜D_6にそれぞれ対応する複数の分割エリアが割り当てられる。CPUは、部屋RM1に存在する1または2以上の人物にそれぞれ対応する1または2以上の代表点を検出し、検出された1または2以上の代表点の各々から分割エリアの境界までの距離を測定し、そして測定結果に基づいて空調装置D_1〜D_6の出力動作を制御する。
【効果】部屋RM1に向けた適応的な出力制御の精度が向上する。
(もっと読む)
電子カメラ
【構成】イメージセンサ16は被写界を捉える撮像面を有し被写界像を出力し、LCDドライバ26およびLCDモニタ28はイメージセンサ16から出力された被写界像をモニタ画面に表示する。基準物体検出回路36は既定方向において第1既定サイズを有する基準物体を表す物体像をイメージセンサ16から出力された被写界像から探索し、CPU40は、発見された物体像のサイズを基準サイズとして測定する。グラフィックジェネレータ34は既定方向において第2既定サイズを定義する基準画像を基準物体検出回路36の探索処理に関連してモニタ画面に表示し、CPU40は表示された基準画像を基準物体の位置で光軸に直交する平面に仮想的に投影した仮想投影画像のサイズを基準サイズと第1既定サイズと第2既定サイズとに基づいて算出する。
【効果】所望の物体のサイズを簡便に測定することができる。
(もっと読む)
半導体ウェハの表面検査システム及び表面検査方法
【課題】半導体ウェハ表面に存在するソーマークなどの線状の凹凸について、短時間かつ容易に検査が可能であり、検査に対する振動の影響を低減できる技術を提供する。
【解決手段】半導体ウェハWの表面の全域に光源装置2によって斜め方向から光を照射し、CCDカメラ4で半導体ウェハW全体を撮影する。これにより、半導体ウェハWの各ポイントからの前記照射光の反射光または散乱光の強度を検出する。取得された光の2次元的な強度分布に基づいて、半導体ウェハWの表面に生成されたソーマークなどの凹凸を検出し、またはその大きさを測定する。
(もっと読む)
画像処理方法、画像処理装置、プログラムおよび記録媒体
【課題】 タイヤの種類、タイヤ表面の状態および照明の位置関係に依存することなく、検査の安定化および高精度化を図ることができる画像処理方法、画像処理装置、プログラムおよび記録媒体を提供する。
【解決手段】 制御部12は、タイヤ回転方向に直交する方向のラインごとに、取込画像の各画素の濃度を、各画素が含まれるライン上の平均濃度に変換して、濃度射影変換する。次に、濃度射影変換が行われた画像に対して、タイヤの回転方向のラインのうちの1つのライン上の画素について、フーリエ展開する。フーリエ展開された周波数成分からコード露出帯域の周波数成分を除いた残余の周波数成分を逆フーリエ展開し、逆フーリエ展開手段によって求めた逆フーリエ変換濃度と濃度射影変換によって求めた射影変換濃度との差分濃度を求め、差分濃度について、周期性があればコード露出と判定し、周期性がなければ刻印文字と判定して、コード露出欠陥検出処理を行う。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】3次元オブジェクトを上方から撮影した画像に含まれている円筒状または円柱状の3次元オブジェクトを検出するための計算コストを減らすことができる。
【解決手段】3次元オブジェクト抽出部13は、画像に含まれる3次元オブジェクトを抽出する。円形図形検出部100は、上面領域の画像の低解像度画像を用いて円形図形のエッジと前記円形図形の中心点とを検出する。また、円形図形検出部100は、円形図形のエッジと円形図形の中心点とに基づいて、画像の領域のうち円形図形が含まれる領域を設定する。また、円形図形検出部100は、円形図形が含まれる領域の画像を用いて円形図形のエッジと中心点と半径とを算出する。3次元位置姿勢計算部21は、3次元オブジェクト抽出部が抽出した3次元オブジェクトのうち、円形図形の中心点と半径とに基づいて、上面が円形状である円筒または円柱状の3次元オブジェクトの形状を検出する。
(もっと読む)
情報端末装置
【課題】地磁気センサを搭載する必要がなく、利用者の向きを推定したり、その推定結果に従って表示部の表示情報を制御したりすることができる、信頼性の高い情報端末装置を提供すること。
【解決手段】被写体11は、光源を含む全周からの光を受ける。撮像部12は、被写体11の画像を取得する。推定部13は、撮像部12により取得された画像を解析し、光源の方向に依存する特徴量を抽出し、該特徴量から撮像部により取得された画像における光源の方向を推定して基準方位を設定すると共に該基準方位を元に他の方位を推定する。制御部15は、メモリ14から表示情報を読み出すともに、推定部13により推定された方位に応じて、表示情報を制御し、表示部16に表示させる。
(もっと読む)
パンタグラフ高さ測定装置
【課題】パンタグラフの高さ測定におけるキャリブレーションを簡易に行うことを可能としたパンタグラフ高さ測定装置を提供する。
【解決手段】車両の屋根上に設置されて車両のパンタグラフを撮影するラインセンサカメラ2と、ラインセンサカメラから入力される画像信号を時系列的に並べて入力画像を作成する入力画像作成部3a、テンプレートを予め登録するテンプレート設定部3b、パンタグラフの実際の位置を入力するパンタグラフ高さ入力部3c、入力画像に対して二値化処理を行う二値化処理部3d、及び入力画像上のマーカの位置を抽出するピクセル位置抽出部3eとを備えるキャリブレーション手段と、前述の対応関係を用いてラインセンサカメラ2によって撮影したパンタグラフの入力画像上の位置から実際のパンタグラフの高さを算出するパンタグラフ変位測定手段とからなる処理用コンピュータ3とを備える構成とした。
(もっと読む)
対象物検出装置及び対象物検出方法
【課題】周辺の状況や観測機器による影響を抑え、対象物を正確に検出することのできる対象物検出装置を得る。
【解決手段】射影装置2は、記憶装置1に記憶されている3次元の座標値をもつ点群データを平面に射影した射影パターンを生成する。平滑化装置3は、対象物に対し平滑化した射影パターン上でピークを生成するよう射影パターンを平滑化する。照合装置4は、平滑化した射影パターンとテンプレートパターンとを照合し、対象物が存在した地点の平滑化した射影パターンと一致あるいは近似するテンプレートパターンとの相関が高い平滑化した射影パターン上の位置を対象物の存在位置として検出する。
(もっと読む)
レーザ計測装置を用いて被計測物を複数方向から同時計測するシステム
【課題】大量の遺物を複数方向から同時計測し、欠損の少ない遺物単位の三次元表面モデルを取得する、レーザ計測装置を用いて被計測物を複数方向から同時計測するシステムを提供する。
【解決手段】ガラステーブル11上に載置した複数の被計測物R1〜R4及び計測用マーカ16に対し、上下方向からレーザを照射し上記複数の被計測物及び計測用マーカの三次元座標の計測データを取得する複数のレーザ計測装置12〜14と、モデリング生成部15とからなる。モデリング生成部15は、計測用マーカ16に関する特徴線について位置合わせを行い、幾何変換行列を獲得した後で、各レーザ計測装置12〜14から得られた単位点群を幾何変換して統合データを取得し、ラベリング技術を用いて被計測物毎の統合データに分離してメモリに記憶する。
(もっと読む)
電磁干渉パターンの使用
可視光干渉パターンの様々な使用が提供される。適した干渉パターンは、絞りのパターンからの回折により形成されるパターンである。本明細書中で開示される典型的な使用は、並進及び/又は角度位置決定システムなどの空間計測学に関連する。更なる使用は、光自体の特性の解析(例えば、電磁放射線の波長の決定)を含む。更なる他の使用は、光が通過する物質の1つ以上の特性(例えば屈折率)の解析を含む。干渉パターンの一部がCCDチップなどの画素化された検出器で捕らえられ、捕らえられたパターンが計算されたパターンと比較される。最大値間の間隔の非常に正確な測定が可能であり、したがって、干渉パターン中における検出器の位置の非常に正確な測定を行なうことができる。 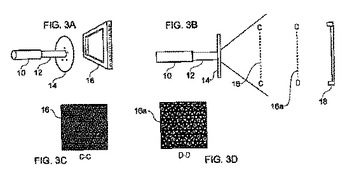 (もっと読む)
(もっと読む)
線幅測定装置および線幅測定装置の照明レベル設定方法
【課題】線幅測定装置の測定照明レベルの設定を、ある基準を持って設定するようにし、操作者による設定のばらつきを無くし、安定した測定を行うことが可能な線幅測定装置および照明レベル設定方法を提供すること。
【解決手段】初期値としての任意の照明レベルで線幅測定対象であるパターンの画像情報を取り込み、取り込んだ画像情報に基づいてパターンの線幅を算出し、線幅を算出できなくなる上限(および下限)の照明レベルまで初期値から徐々に照明レベルを上げながら(下げながら)パターンの画像情報を取り込み、取り込んだ画像情報に基づいてパターンの線幅を算出し、上限の照明レベルと下限の照明レベルとの中間の照明レベルを算出し、算出した中間の照明レベルを線幅測定装置の適正照明レベルとして設定する。
(もっと読む)
タイヤ表面を検査するために使用できるようにするようタイヤ表面の3次元画像を処理する方法
タイヤの表面の一部分を検査する方法であって、表面が隆起マークを有し、この方法では、検査されるべき表面の3次元プロフィールを求め、検査されるべき表面上の特徴的な箇所の存在場所を突き止め、これら箇所を基準面の3次元データから得られた対応の特徴的な箇所と照合して1組の対をなす照合状態の特徴的箇所を生じさせ、繰り返し、第1の変換関数により変換された基準面の特徴的箇所の各々とこれらと照合された検査されるべき表面の特徴的箇所の各々との間の相互間の距離の合計を表す値が最小であるように基準面の特徴的箇所に適用されるべき第1の変換関数を探し、第1の変換関数を基準面の特徴的箇所の全てに適用して変換済み基準面を得る検査方法。 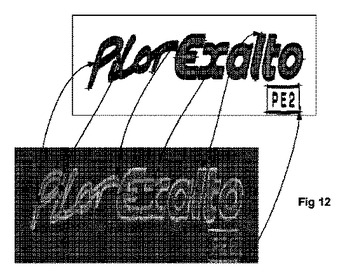 (もっと読む)
(もっと読む)
3次元位置情報復元装置およびその方法
【課題】透視投影カメラモデルに基づいた擬似的でない正確な3次元位置を復元する。
【解決手段】各二次元画像から複数の特徴点を検出し各二次元画像について当該特徴点を追跡する手段と、連続する所定数の二次元画像を各特徴点毎に分配する手段と、各特徴点毎の連続する所定数の二次元画像について各特徴点毎の3次元位置Xα′とカメラの位置Πκ′を射影復元する射影復元部と、前記射影復元部により射影復元した3次元位置Xα′とカメラの位置Πκ′とを射影変換行列Hおよびカメラパラメータ行列により正しい3次元位置Xαとカメラの位置Πκとを求める自己校正部とを有する。
(もっと読む)
1 - 20 / 49
[ Back to top ]