
Fターム[2F069AA31]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 長さ (547)
Fターム[2F069AA31]の下位に属するFターム
Fターム[2F069AA31]に分類される特許
121 - 123 / 123
携帯型の距離測定装置

【課題】本発明は、対象物の表面領域への距離を測定する携帯型の距離測定装置に関する。
【解決手段】距離測定装置は、ハウジングおよび距離の光学的測定のレンズ系を備えている。レンズ系を通して表面領域にビームが送られ、そこで反射する反射ビームを再び集める。距離測定装置は、ハウジングに接続した第1の構成要素を備える。第1の構成要素は、短い距離の測定で、送るビームの方向にハウジングから延ばせて、光学的測定では、スペーサとして作用する。第1の構成要素が延びた状態が、検知装置で自動的に測定される。
(もっと読む)
工作機械用測定方法
工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。前提の機械位置の値と実際の値との間の誤差を補償するためにいくつかの方法が記載されている。
 (もっと読む)
(もっと読む)
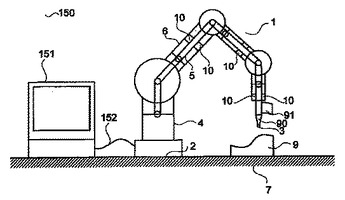
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
121 - 123 / 123
[ Back to top ]