
Fターム[2F069AA31]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 長さ (547)
Fターム[2F069AA31]の下位に属するFターム
Fターム[2F069AA31]に分類される特許
81 - 100 / 123
強化された手動制御によるCMMアーム

本発明は、外郭が設けられた強固CMMアーム用装置に関し、内部CMMアームと、内部CMMアームを、1つ以上の内部ボリュームが、固体対象物および流体の進入に対してシールされるように、複数の伝達手段を介して駆動する外郭を備える。本発明はまた、RCAの触覚制御にも関する。 (もっと読む)
鋼板のエッジ検出方法

【課題】鋼板の表面欠陥や内部欠陥を検出する検査装置に適用し、安価にかつ正確に鋼鈑のエッジ検出ができる鋼板のエッジ検出方法を提供することを目的とする。
【解決手段】検出スキャン毎に得られる各チャンネルの信号の中から、エッジを検出したチャンネルの候補を抽出し、該候補から板幅推定値を算出し、該算出した値と板幅実測値を比較し、さらに前回のスキャンでのエッジチャンネル位置と今回のチャンネル位置を比較する。
(もっと読む)
測定器
【課題】 操作性が高く、かつ、検出精度、検出分解能が高い測定器を提供する。
【解決手段】 スピンドル300の回転に応じてスピンドル300の異なる回転角に対して異なる値の位相信号を発信する位相信号発信手段400と、位相信号を演算処理してスピンドルの絶対位置を求める演算処理部500と、を備える。位相信号発信手段は、位相信号を所定のピッチで発信する。スピンドル300の異なる回転角に対して位相信号は異なる値であるので、位相信号からスピンドル300の回転角が一義的に決定される。インクリメンタル式と違って、位相信号の読み飛ばし等が問題とはならないので、スピンドル300の高速回転を許容して測定器の操作性を向上させることができる。さらに、位相信号の読み飛ばしが問題とはならないので、スピンドル300の回転に対する位相信号の変化を細密化できる。
(もっと読む)
超小型電子機構の所望寸法を測定するのに用いられる計測ツールにおける障害を識別する方法、該寸法を測定するのに用いられる計測ツールシステムにおける障害を識別する方法、及び、該システムにおける障害を識別するコンピュータプログラム(計測ツールエラーログ解析方法及びシステム)
【課題】超小型電子機構の所望寸法を測定するのに用いられる計測ツールシステムの障害を識別する方法を提供する。
【解決手段】システムの各計測ツールは超小型電子機構の所望寸法を測定するため、複数のレシピを実行し、各レシピは、超小型電子機構の少なくとも1つの寸法を測定するために一連の命令を含む。システムは、超小型電子機構寸法の測定の際に障害を記憶するエラーログを含む。方法は、計測ツールにより用いられたレシピに対して、正規化された数のエラーを、エラーログに記憶されている障害から決定する工程と、エラーログ内の最大の正規化された数のエラーを有する1つ以上のレシピを識別する工程と、最大の正規化された数のエラーを有する1つ以上の識別されたレシピを、測定ツールにより実行すべきジョブのリストにて識別する工程と、最大の正規化された数のエラーを有する1つ以上の識別されたレシピから1つ以上のレシピのエラーの原因を決定する工程とを含む。
(もっと読む)
ワイヤ位置検出方法及びその装置
【課題】 シート状部材を切断しながらシート状部材の幅方向両端のワイヤの位置をそれぞれ検出することにより、切断面における両端のワイヤ間の長さを正確に求めることができるワイヤ位置検出方法及びその装置を提供する。
【解決手段】 磁性体のカッター130とそのカッター130からワイヤ301の長手方向に所定距離だけ離れた位置との間の磁気抵抗をカッター130とともに移動する磁気抵抗検出器140によって検出し、ワイヤ301と接触していないカッター130がワイヤ301と接触することにより磁気抵抗が変化したときのカッター130の位置と、ワイヤ301と接触しているカッター130がワイヤ301と接触しなくなることにより磁気抵抗が変化したときのカッター130の位置に基づいてシート状部材300の幅方向両端のワイヤ301の位置をそれぞれ検出する。
(もっと読む)
スケール用の保持具
スケール(2)用の保持具は、担持体(4)と、スケール(2)に沿ってスケール(2)の両側に配置された複数の固定要素(10)とから成る。担持体(4)と固定要素(10)の間に、それぞれ撓み継手(20)が配置されており、この撓み継手が、固定要素(10)を、したがってスケール(2)を、測定方向Xに変位可能に担持体(4)に連結する。 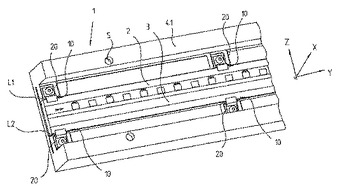 (もっと読む)
(もっと読む)
ワークピース搬送メカニズムのためのゲージ・グリッパ組立体
ワークピースの特性を直接的に測定するゲージ・グリッパ組立体である。組立体は、ロボットアームのような搬送メカニズムに取り付けられるために適応されており、グリッパおよびゲージを有するヘッドを含む。グリッパは把手部またはその他の手段を使用してワークピースを持ち上げ、保持するために適応されており、ゲージは、ワークピースがグリッパによって保持されている間に、ワークピースの特性を直接的に測定するために適応されている。  (もっと読む)
(もっと読む)
耳ゴム付着量測定方法及びその装置
【課題】測定時におけるセンサ移動に伴う振動を低減して測定精度の向上を図った耳ゴム付着量測定方法及びその装置を提供する。
【解決手段】スチールコーティング材料300による遮光量が非遮光時における全光量の約1/2となった位置で計測ユニット120A,120B及びレーザ光射出ユニット131A,131Bを停止し、受光器132A,132Bの受光量によってスチールコーティング材料300の側端位置を検出した後、磁気センサ164A,164Bを移動させてスチールコーティング材料300の最外側のスチールワイヤー部材301の位置を検知し、スチールコーティング材料300の側端位置とスチールコーティング材料の最外側のスチールワイヤー部材301の位置との間の距離を耳ゴム付着量として算出して表示する。
(もっと読む)
加工対象物の表面を走査するための方法
測定システムは関節式プローブヘッドに取り付けられた表面検出器を有し、プローブヘッドはさらに座標位置決め装置に取り付けられる。表面検出器は、表面を走査するため、座標位置決め装置およびプローブヘッドの少なくとも一方を少なくとも1つの軸線に関して駆動することにより、表面に対して動かされる。この表面検出器は表面からのその距離を測定し、プローブヘッドは、表面検出器の相対位置を実時間にて表面から予め設定された範囲内まで制御するため、表面検出器が少なくとも1つの軸線を中心として回転するように駆動される。  (もっと読む)
(もっと読む)
画像処理方法および画像処理装置
【課題】 複数のMR体験者が、同一の複合現実感を体験する場合、体験者同士が接触する可能性があり、本願発明は、MR体験者に接触する可能性のあることを報知することができる画像処理装置を提供することを目的とする。
【解決手段】 ユーザの視点位置および方向から撮像された現実世界画像を描画し(S401)、このときのユーザの視点位置および視線方向がセンサ部により検出され、その視点位置が、接触の可能性のある注意距離内であるか否かが判定し(S403〜S404)、注意距離内であれば、その旨の注意表示がなされる(S405〜S406)。
(もっと読む)
距離推定装置、異常検出装置、温度調節器および熱処理装置
【課題】 被処理物を、熱板に接近させて行う熱処理において、被処理物と熱板との距離を推定できるようにする。
【解決手段】 被処理物としてのワークが載置されて熱処理される熱板1の温度情報、例えば、熱板1の温度の傾きの絶対値に基いて、距離推定手段7でワークと熱板1との距離を推定し、推定した距離と閾値とを判定手段8で比較することによって、異常の有無を判定するように構成している。
(もっと読む)
間口の寸法測定装置
【課題】 探触子の接地の際、手ぶれにより測定誤差が発生せず、また敷居/鴨居/柱に養生材が貼り付けられたままで、間口の実寸法を測定する装置を提供すること。
【解決手段】 雲台を有する三脚と、雲台に取り付けられる寸法測定装置本体と、寸法測定装置本体にワイヤーで結合される探触子とを具備し、上記寸法測定装置本体は、雲台に取り付けられる基台と、基台の水平方向に植設された固定軸に回動自在に設けられた回転台と、基台に対する回転台の回動角度を検出するロータリ・エンコーダと、基台から測定点まで長さを検出するリニア・エンコーダと、検出した角度および長さのデータを格納する記憶手段とを具備し、また、探触子は、自在に回動するリンクに結合された先端部と、先端部に対して左右に回動するクランクと、ワイヤーとともに回動する受光手段とを具備するものである。
(もっと読む)
ホイールアライメント方法及び測定用ホイール
【課題】ホイールアライメントの一環として車体幅方向の中心とホイールとの位置関係を測定することで車体本体とホイールの位置関係を適切に計測できるようにすることを課題とする。
【解決手段】ホイールアライメント方法として、車体中心設定工程によって測定するホイールが取り付けられた車体の幅方向の中心線を設定し、また、測定工程によって、前記中心線を通る車体を2分する中心平面と、前記ホイールの所定位置との距離を直接的もしくは間接的に測定する。
(もっと読む)
ドリル穴測定装置および削岩装置
本発明は、ドリル穴測定装置と、この測定装置を装備した削岩装置とに関するものである。測定装置(1)は保護要素(3)を有し、その内側においてセンサ(6)を移送装置(4)によって移送可能である。  (もっと読む)
(もっと読む)
ゴムホースのワイヤの巻付けピッチの検査方法および検査装置
【課題】ゴムホースの成形において構成部材としてスパイラル状に巻付けられるワイヤの巻付けピッチを容易に精度よく検査でき、検査作業の軽減および品質の向上を図ることが可能なゴムホースのワイヤの巻付けピッチの検査方法および検査装置を提供する。
【解決手段】ワイヤ10がスパイラル状に巻付けられる位置C1と、このワイヤ10の外側に層間ゴム13が巻付けられる位置C2との間に配置したセンサ2で、移動するスパイラル状に巻付けられたワイヤ10を検知して検知信号を発信し、検知信号とマンドレル14の移動速度とに基づいてデータ処理装置7がワイヤ10の巻付けピッチを算出するとともに、算出したピッチと、予めデータ処理装置7に登録されている所定ピッチとの比較結果がモニター8に表示される。
(もっと読む)
身体組成測定装置
【課題】被験者による入力の煩雑さを軽減することのできる身体組成測定装置を提供すること。
【解決手段】被験者の身体の複数の所定の部位に対応付けて接触させるための複数の電極11〜18と、被験者の手で保持可能な保持部2と、保持部2に一端が接続されるケーブル3と、被験者の足を載置可能な載置部1とを備え、引出量検出部により検出された引出量および角度検出部で検出された角度に基づいて、被験者の所定の身体部位の部位長を計算するための部位長計算部101と、複数の電極11〜18を用いて、所定の身体部位のインピーダンスを計測するためのインピーダンス計測部102と、部位長計算部101で計算された所定の身体部位の部位長と、インピーダンス計測部102で計測されたインピーダンスとに基づいて、所定の身体部位の身体組成を算出するための体組成算出部とを備える。
(もっと読む)
電子機器及び状況通信装置
【課題】 少なくとも一部が外側に凸な曲面を有し、当該曲面を重力方向に向けて他の物体上に載置可能な筐体の電子機器及び状況通信装置を提供する。
【解決手段】 接触センサ3が物体に接触し、かつ、姿勢センサ31により接触センサ3が重力方向を向いている姿勢がとられていることを検出すると、モータ7を右回転させると、モータ回転軸10も足支え板6の貫通孔61内を右回転してせり上がってゆく、すると相対的に足支え板6がストッパー12に接触するまで下へ下がることになり、足21〜23が筐体2から突出される。また、状況通信装置100が持ち上げられた場合には、接触センサ3が物体への接触を検知しなくなるので、モータ7が左回転させられる。すると、足支え板6は回転と共に移動し、ストッパー11に接触するまで上がってゆき、足21〜23が格納される。
(もっと読む)
寸法測定装置
【課題】 動作確認が必要な衝撃が加えられたことが容易に分かる寸法測定装置の実現。
【解決手段】 寸法測定値を生成する寸法測定部31を備える寸法測定装置であって、当該寸法測定装置に設けられ、所定以上の衝撃が加えられたことを検出する加速度センサ47と、加速度センサ47が、所定以上の衝撃が加えられたことを検出した時にオペレータに警告を出力する警告手段32,34とを備える
(もっと読む)
不確かさ推定方法及びプログラム
【課題】 理論解析が困難な測定システムの不確かさをモンテカルロ法により推定すると共に、ユーザの負担を小さく抑え、かつ信頼性の高い不確かさ推定を行うことを可能にする。
【解決手段】 推定対象の測定機により得られた測定値を入力し、測定値の誤差を推定する(S1)。推定された測定値の誤差に基づいて測定値間の共分散行列又は相関行列を求め(S2)、共分散行列又は相関行列を固有値分解することにより固有値と固有ベクトルを求め(S3)、各固有ベクトルに対して、期待値が0で、且つ分散がその固有ベクトルに対応する固有値となるような正規乱数を結合係数として生成し、全固有ベクトルの線形結合をとることにより前記測定機の擬似測定値を生成する(S4)。得られた擬似測定値を統計処理することにより測定機の不確かさを推定する(S5)。
(もっと読む)
スロットロッドのスロット形状検出方法
【課題】 SZonSZスロットの反転角度および捻回ピッチを測定することができるスロットロッドのスロット形状検出方法を得る。
【解決手段】 連続する短周期SZ撚りの反転角度の平均を算出して短周期SZ撚りの反転角度を検出する。また、短周期SZ撚りの最大反転角度と最小反転角度を検出し、前記最大反転角度から前記最小反転角度を差し引き、さらに前記短周期SZ撚りの平均反転角度を差し引くことで、長周期SZ撚りの反転角度を検出する。
(もっと読む)
81 - 100 / 123
[ Back to top ]