
Fターム[2F069AA38]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 長さ (547) | 径 (93)
Fターム[2F069AA38]の下位に属するFターム
Fターム[2F069AA38]に分類される特許
1 - 16 / 16
電子機器
測定方法、測定装置及びプログラム
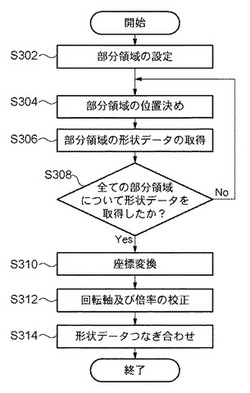
【課題】被測定面の形状測定に有利な技術を提供する。
【解決手段】円形外形の被測定面の形状を測定する測定方法であって、被測定面を保持するステージをステージ回転軸を中心として回転させ被測定面の複数の部分領域のそれぞれを測定装置の視野に位置決めし(S304)、部分領域のそれぞれを測定して形状データを取得する取得ステップ(S306)と、部分領域のそれぞれの形状データから被測定面の形状を算出する算出ステップとを有し、輪郭部分領域のそれぞれについて被測定面の中心の位置を求める第1ステップと、被測定面の複数の中心の位置から回転する被測定面の回転の中心である回転軸の位置を求める第2ステップと、第2ステップで求めた回転軸の位置及び複数の部分領域のそれぞれを位置決めする際のステージの回転角度を用いて、複数の部分領域のそれぞれの形状データをつなぎ合わせて被測定面の形状を求める第3ステップ(S314)とを有する。
(もっと読む)
計測点からの円筒情報の抽出方法

【課題】
本発明の課題は、円筒表面の計測点から円筒データを確実に作成できると共に、高精度な近似が可能な計測点からの円筒情報の抽出方法を提供することにある。
【解決手段】
上記課題を解決するために、本発明では、最初に計測点から球の中心を定め、次に、球の中心を円筒の仮中心点とし2つの角度を変化させて投影方向を定めて計測点を投影し、円周と投影した計測点の距離の二乗の総和が最小になる角度を選択し、次に、当該角度を収束計算で精度向上させ、最後に、精度向上させた角度、仮中心点を当該角度で投影した値を円筒中心の初期値とし、円周と投影した距離の二乗の総和が最小になる角度および円の中心点を定めることによって、短時間で精度の良い円筒の半径、中心、中心軸を得ることを特徴とする。
(もっと読む)
R形状計測装置、R形状計測方法及びR形状計測プログラム
【課題】R1,000以上、特にR10,000以上の大径を有する被測定物のR形状を高精度に計測することができ、かつ、持ち運びができるようなR形状計測装置並びにR形状計測方法及びR形状計測プログラムを提供する。
【解決手段】被測定物上の少なくとも3点における座標値を測定する手段と、測定された前記座標値に基づいて、R形状の中心値(a,b)及び半径Rを、A=−2a、B=−2b、C=a2+b2−R2と置換した場合に、該A、B及びCのそれぞれを変数として、円の一般式の残差平方和を示す式を偏微分してなる連立方程式から取得するR形状算出手段と、を含む。
(もっと読む)
ねじ検査装置
【課題】ねじの異なる規格への適用性が良く、検査効率が高く測定精度の良いねじ検査装置を提供する。
【解決手段】定位手段は、台枠の搭載面311にねじを着脱可能に装着するためのチャックユニット41が取り付けられ、該チャックユニット41にはねじが装着されるための、該搭載面と平行なX方向の両端に開口すると共に該X方向と垂直なZ方向に開口するスリット412が形成されている。検出手段5は、スリット412に対してZ方向沿いに往復移動可能に台枠に設けられた滑り台と、滑り台をZ方向沿いに往復移動させるように駆動する第1の動力源54と、スリット412のX方向の両端開口の外側に互いに対向して滑り台に設けられている発光器52と受光器53とを有する。
(もっと読む)
タイヤ半径測定装置、タイヤ半径の変位測定方法及び車輪
【課題】タイヤ半径を高精度に測定する。
【解決手段】シート状の第1の磁石11、第2の磁石21をトレッド部2の内周面側に貼り付け、第1の磁気検出素子12、第2の磁気検出素子22を、磁石11、21と対向させてリムウェル部4に設ける。磁気検出素子12、22毎にその測定値について、変位が生じる前の、出荷時等といった基準状態における基準測定値Mr1、Mr2に対する測定値の変位を演算する。変位が最大となる測定値は、接地面からの影響を受けている可能性があると判断し、この測定値を除く他の測定値のみを、トレッド部2とリムウェル部4の間の距離を表すタイヤ半径相当値RRとし、このタイヤ半径相当値RRに、タイヤ中心からリムウェル部4までの距離などを表す予め検出した定数を加算してタイヤ半径Rを演算する。
(もっと読む)
光学式やタッチプローブ型の測定機構部及び軸体支持機構部を有する軸体測定装置及び該装置による軸体の諸元及び精度の測定方法
【課題】 一体構造の装置で任意の形状の軸体の各部の諸元,精度等を効率的に、かつ高精度に測定できる軸体測定装置及びそれによる軸体の諸元及び精度の測定方法を提供する。
【解決手段】 軸体測定装置100は軸体200の外径,真円度,振れ,偏芯,キズ等を測定する光学式測定機構部1と、軸体200の幅寸法や振れ等を測定するタッチプローブ型測定機構部2と、軸体200を支持する軸体支持機構部3と、これ等の制御部4等を一体構造に配置したものからなる。また、タッチプローブ型測定機構部2の接触子2a等の位置調整等を行う接触子補正具7が設けられている。また、測定方法の1つとして外径寸法は軸体200に光学式測定機構部1の投光部1aから光線を当てて通過光線を受光部1bで測定することにより容易に求められる。
(もっと読む)
形状測定装置
【課題】被測定物の3次元形状を規定した測定点群から精度よく簡便に形状測定する形状測定装置を提供する。
【解決手段】被測定物の形状を規定した3次元の測定点群データ2が3次元測定装置8から出力されると、形状測定装置1の断面抽出部3が、測定点群データ2から所定の切断面に含まれる測定点を抽出した断面点群データ4を生成する。測長領域設定部5は断面点群データ4に測長領域を設定する。入出力装置7を介して、ユーザから測長領域の断面点群が指定されると、測長部6がその断面点群を用いて被測定物の外側寸法、内側寸法、2点間寸法、角度等を測定する。
(もっと読む)
機器制御装置および機器制御方法
【課題】第1報の緊急地震速報が誤報である場合の経済的損失を最小にとどめることができる機器制御装置を提供すること。
【解決手段】制御対象の設置位置付近の地震の予想震度を含む地震速報を受信する地震速報受信部41と、制御対象の設置位置付近での地震によるP波を検知するP波検知部42と、地震速報の確実性が必要な制御対象に対しては、地震速報を受信しかつP波を検知したときに、また、地震速報の確実性が不要な制御対象に対しては、地震速報を受信した時点またはP波を検知した時点のいずれか早い時点で、制御対象に設定された地震発生時の処理動作を開始すると判定する処理開始判定部44と、処理開始判定部44によって処理動作の開始の判定が行われた制御対象に対して、地震発生時の処理動作の実行指示を含む制御信号を生成する制御信号生成部45と、を備える。
(もっと読む)
ばね等検査部品の自動測定判別機
【課題】ばね等の検査部品に要求される複数の検査部品の検査を一連の検査の流れで行うと共に、検査の都度不良品はその段階で検査の流れから外し、最終的に良品のみを検査の流れから取り出すことにより、効率よく検査を行うことにある。
【解決手段】ばね等検査部品の複数の検査項目を自動的に測定して良品、不良品を判別するばね等検査部品の自動測定判別機であって、回転盤20と、検査部品供給経路装置14と、検査部品搬出経路装置16と、複数の測定ユニットと、不良品排出装置122とからなり、検査部品供給経路装置14から回転盤20に供給された検査部品をその公転移動中に複数の測定ユニットにより複数の検査項目の測定を行い、不良品は検査の都度、不良品排出装置122により排出し、最終的に良品の検査部品のみ検査部品搬出経路装置16から搬出することを特徴とする。
(もっと読む)
切削工具のパラメータを抽出するためのシステム及び方法
【課題】切削工具のパラメータを抽出するための方法を提供する。
【解決手段】本方法は、切削工具の表面に対応する点集団を有する測定データセットを取得する段階と、所定のセクションにおいて点集団を仮想的にスライスして該所定のセクション上の点セットを取得する段階とを含む。本方法はまた、点セットを通る複数の曲線を生成しかつ複数の曲線を最適化して最適化適合曲線を生成する段階と、最適化適合曲線から切削工具のパラメータを抽出する段階とを含む。さらに、提示した回転角投影法に基づいて、切削工具について複数のパラメータを抽出することができる。
(もっと読む)
情報処理方法、情報処理装置およびプログラム
【課題】 金型部品のような物品を検査する際、物品の実測により得られた点群データと、物品に関する規定の設計データとの関連付けに誤りが生じることを防止する。
【解決手段】 部品に関し規定された設計データの面の形状を表す特徴値と、部品の実測により得られた点群データについて算出した特徴値とを対比することにより、点群データと設計データの面とを関連付ける。
(もっと読む)
鉄道車両の車輪形状測定装置
【課題】車両の重量でレールが沈下しても、車輪の形状を正確に測定することができるようにしたい。
【解決手段】レール11の外側に設置され車両10の車輪100における外側のフランジ面までの距離を非接触で計測する外側距離センサ1aと、レールの内側に設置され車両の車輪における内側のバック面までの距離を非接触で計測する内側距離センサ1bと、車両の走行速度を計測する速度検出器17と、レールまでの垂直方向での距離を計測する垂直方向距離センサ16と垂直方向距離センサの計測結果から車両の走行時におけるレールの沈下量を演算する沈下量計測手段を設け、処理部7で両距離センサ1a,1bと速度検出器17の各計測結果と両距離センサ1a,1bの設置に係る距離のデータおよび沈下量計測手段で得るレールの沈下量から車輪の形状を演算する。
(もっと読む)
非接触計測データの解析システム
【課題】 物体の三次元形状に関する非接触計測データと設計データとを比較して、その誤差値を数値化するようにした非接触計測データの解析システムを提供する。
【解決手段】 管理部位としてボルト13a又はナット13bの計測の際に、計測部が、寸法管理された円柱部16a,17aを有する計測治具16,17をボルト又はナットに取り付けて、計測治具の輪郭を含めた点群データを作成し、比較部が、点群データから抽出した計測治具の外接円16c,17cに基づいて外接円の中心と面角度を算出し、算出した外接円の中心と面角度と既知の円柱部部の寸法に基づいてボルト又はナットの中心座標を算出し、さらに中心座標と対応する基準点データとを比較して誤差を計算する。
(もっと読む)
ワークピース搬送メカニズムのためのゲージ・グリッパ組立体
ワークピースの特性を直接的に測定するゲージ・グリッパ組立体である。組立体は、ロボットアームのような搬送メカニズムに取り付けられるために適応されており、グリッパおよびゲージを有するヘッドを含む。グリッパは把手部またはその他の手段を使用してワークピースを持ち上げ、保持するために適応されており、ゲージは、ワークピースがグリッパによって保持されている間に、ワークピースの特性を直接的に測定するために適応されている。  (もっと読む)
(もっと読む)
寸法測定システム、寸法測定装置及びマスタ
【課題】 マスタを間違えた誤った校正処理を防止できる寸法測定システムの実現。
【解決手段】 寸法測定装置10と、所定の寸法値の部分を有する複数のマスタ50A,50Bとを備え、所定の寸法値の部分を測定して寸法測定装置を校正する寸法測定システムであって、各マスタは、寸法測定装置がマスタの所定の寸法値の部分を測定する状態にあることを検出する測定状態検出手段55と、寸法測定装置が所定の寸法値の部分を測定する状態にあることを検出したことを示す測定状態信号を送信する無線通信手段とを備え、寸法測定装置は、測定状態信号を受信する無線通信手段37を備え、無線通信手段が測定状態信号を受信している時に校正処理を行う。
(もっと読む)
1 - 16 / 16
[ Back to top ]