
Fターム[2F069AA31]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 長さ (547)
Fターム[2F069AA31]の下位に属するFターム
Fターム[2F069AA31]に分類される特許
41 - 60 / 123
レールの検査装置
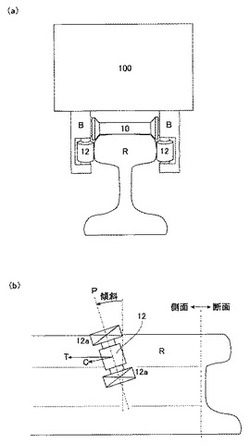
【課題】レールRの長手方向の曲がり(上下変位と左右変位)などを安定して測定、検査できる、レールの検査装置100を提供する。
【解決手段】レールRの側面と接触しながら転動する車輪12の中心軸Pを、レールの検査装置100の走行方向に傾斜させ、その傾斜の向きを、車輪12が、レールRの側面と接触しながら転動する際に、車輪12に下向きの力が作用する向きとする。
(もっと読む)
管の機械加工方法
本発明は、コンピュータ制御された管の機械加工、特に、レーザによる管の切断のための方法に関する。上記方法は、以下のステップを備えている。
−或る長さの管を供給するステップと、
−コンピュータ制御された機械加工ステーションに上記供給された管を配置するステップと、
−上記供給された管を機械加工するために、上記機械加工ステーションを制御するためのプログラムを実行するステップと、
−上記コンピュータ制御された機械加工ステーションに上記管を配置する前に、上記供給された長さの管の寸法を計測するステップ。 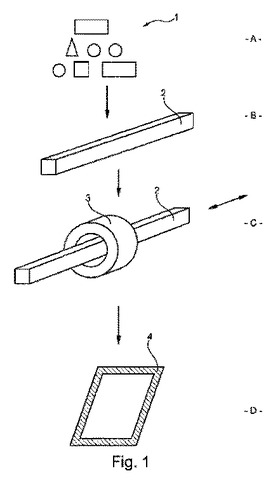 (もっと読む)
(もっと読む)
直線案内機構および測定装置

【課題】長ストロークに対応しつつ、良好な直線性を確保できる直線案内機構および測定装置を提供する。
【解決手段】直線案内機構は、固定部材1と、移動部材2と、固定部材1と移動部材2との間に配置され移動部材2を移動可能に支持する第1の2重平行板ばね機構11Aおよび第2の2重平行板ばね機構12Aとを備える。第1の2重平行板ばね機構11Aおよび第2の2重平行板ばね機構12Aは、移動部材2の移動軸線を中心として180度以外の角度(例えば90度)で配置されている。
(もっと読む)
キャップ検査装置及びキャップ検査方法
【課題】検査対象の容器の大きさが異なる場合でも容易に対応可能なキャップ検査装置を提供する。
【解決手段】口金部101にキャップCPを装着した樽100がコンベア2の搬送経路に沿って搬送され、樽100の上方からキャップCPの天面Uの傾斜を検知するキャップ検査装置1であって、搬送経路の上方に設けられ、天面Uの同一直線上にない3点の測定範囲A1〜A3までの距離を計測する計測ユニット3と、計測ユニット3の計測結果に基づいて、天面Uが傾斜しているか否かを判別する制御装置10と、を備えた。
(もっと読む)
測定装置
【課題】測定対象物の測定位置を測定センサに対して正確かつ簡単に位置決めすることができる測定装置を提供する。
【解決手段】測定装置1は、焼結部品2の寸法を測定する測定センサ3,3と、測定センサ3,3が取り付けられた固定部10と、焼結部品2を保持する治具20とを有する。固定部10には、治具20を測定ポイントへ案内するためのガイド溝13を二次元平面上に形成すると共に、焼結部品2の測定位置A〜P,A〜Pを測定ポイントに一致させるように治具20を固定部10に対して位置合わせする位置決め溝14を、ガイド溝13の溝幅及び溝深さより大きくガイド溝13上に形成する。そして、ガイド溝13の溝幅より大きく、位置決め溝14より小さいボール26を、固定部10側へ付勢する圧縮ばね25を、治具20に設ける。
(もっと読む)
温度測定方法、温度測定装置、温度制御方法、温度制御装置、補正方法、及び補正装置
【課題】被測定物の温度分布が異なる場合であっても、被測定物の温度を正確に測定することができる温度測定方法を提供する。
【解決手段】被測定物aの物理量を測定する際に、被測定物aの温度を測定する温度測定方法である。外部気流流入防止手段10にて、被測定物aの物理量測定部位を外部からの気流を遮断する気流流入防止雰囲気に形成し、その雰囲気中で被測定物aの温度又は被測定物aの近傍の温度を測定する。
(もっと読む)
タイヤの接地長算出方法および装置
【課題】タイヤが転動する際のタイヤの接地長を算出する際、ハイドロプレーニングの発生や制動力、駆動力により接地面の形状が変化しても、適切に接地長を算出する。
【解決手段】転動するタイヤの加速度データから踏み込み側のピーク値(第1のピーク値)と蹴り出し側のピーク値(第2のピーク値)を抽出する。第1のピーク値が第2のピーク値に対して高いとき、踏み込み側閾値の設定に用いる第1の比率の値に対して、蹴り出し側閾値の設定に用いる第2の比率の値が小さくなるように設定し、第2のピーク値が第1のピーク値に対して高いとき、第2の比率の値に対して第1の比率の値が小さくなるように設定する。設定された第1の比率および第2の比率の値は、それぞれ第1のピーク値及び第2のピーク値に乗算して踏み込み側閾値および蹴り出し側閾値を求める。この踏み込み側閾値と蹴り出し側閾値とを用いて接地長を算出する。
(もっと読む)
形状測定装置
【課題】被測定物の3次元形状を規定した測定点群から精度よく簡便に形状測定する形状測定装置を提供する。
【解決手段】被測定物の形状を規定した3次元の測定点群データ2が3次元測定装置8から出力されると、形状測定装置1の断面抽出部3が、測定点群データ2から所定の切断面に含まれる測定点を抽出した断面点群データ4を生成する。測長領域設定部5は断面点群データ4に測長領域を設定する。入出力装置7を介して、ユーザから測長領域の断面点群が指定されると、測長部6がその断面点群を用いて被測定物の外側寸法、内側寸法、2点間寸法、角度等を測定する。
(もっと読む)
灰溶融炉のレベル測定方法及びレベル測定装置
【課題】 イニシャルコストやランニングコストを削減できると共に、現場での作業を減らす。
【解決手段】 炉本体3の天井壁に昇降自在に設けた主電極4先端から炉本体3内に不活性ガスGを供給しつつ、炉本体3内の被溶融物を溶融して炉本体3内に溶融メタル層M及び溶融スラグ層Sを形成する灰溶融炉2に於いて、主電極4を降下させながら炉本体3内に供給している不活性ガスGの背圧を測定し、背圧の増加率の変化から主電極4の先端が溶融スラグ面及び溶融メタル面にあるときの主電極4の位置を検出すると共に、溶融スラグ面及び溶融メタル面の検出時に於ける主電極4の位置から溶融スラグ層Sの厚みL1を算出し、又、炉本体3に設けた非接触式の距離計14により当該距離計14から溶融スラグ面までの距離L3を測定し、前記溶融スラグ層Sの厚みL1と測定距離L3とから溶融メタル層Mの厚みL2つまり溶融メタルレベルMLを算出する。
(もっと読む)
水中移動体の位置検知装置
【課題】水中移動体の位置の検知精度を向上させることができる水中検査装置の位置検知装置を提供する。
【解決手段】水中検査装置9は、上下位置を検出するための圧力センサ18と、姿勢角を検出するための慣性センサ部19とを備えている。また、水中検査装置9は、ほぼ同一平面上の多数の方向における周囲の構造物Aとの相対距離を検出するレンジセンサユニット23を備えている。制御装置11は、圧力センサ18及び慣性センサ部19で検出された水中検査装置9の上下位置及び姿勢角等に基づいてレンジセンサユニット23の検出方向面の位置を演算し、その検出方向面位置における構造物の断面形状及びその位置を演算する。そして、制御装置11は、構造物の断面形状に対する水中検査装置9の相対位置をレンジセンサユニット23の検出結果に基づいて演算し、さらに構造物の断面形状の位置情報に基づいて水中検査装置9の水平位置を演算する。
(もっと読む)
機械装置
【課題】本発明の目的は、振動の影響を大幅に低減することのできる機械装置を提供することにある。
【解決手段】アクティブ制振機構18として、被制振部14に設けられ、該被制振部14の振動方向に振動を発生するアクチェイタ26と、該被制振部14に設けられ、該被制振部14の振動成分を含む加速度信号を出力する加速度センサ28と、予め得ておいた該被制振部14の固有振動情報に基づき、該加速度センサ28よりの加速度信号に含まれる成分のうち、該被制振部14の振動成分を検出し、該検出された振動成分の逆位相の信号を発生する信号処理手段38と、該信号処理手段38よりの逆位相信号に基づき、該被制振部14の振動に対して逆位相の振動を該アクチェイタ26に発生させる制御手段40と、を備えたことを特徴とする機械装置10。
(もっと読む)
金属帯の形状測定装置
【要 約】
【課 題】 極薄金属帯の形状を精度良く測定する形状測定装置を提供する
【解決手段】 金属帯を垂直方向に搬送する搬送手段と、金属帯に付加される張力を制御する張力制御手段と、非接触式距離計を金属帯の長手方向に走査させる距離計走査手段と、非接触式距離計によって得られた測定データから金属帯の形状指標を演算する演算手段と、を有する金属帯の形状測定装置。
(もっと読む)
スロットロッドのスロット形状検出方法
【課題】 SZonSZスロットの反転角及び捻回ピッチを高精度に連続測定することができるスロットロッドのスロット形状検出方法を提供すること。
【解決手段】 スロットロッドの軸中心に対するスロットの回転角を一定周期でスキャンして検出した値を保持し、現在の回転角の値Aと現在より所定の時間T前にスキャンした回転角の値Bとを比較し、比較値が、値Aが値Bより継続して大きいときから値Aが値Bより継続して小さくなるまでの過程で値Bが値Aの値を超えたとき、または等しくなったときから1/2T前時間における回転角を、回転角の極大の反転部PUA1,PUA2……として検出し、比較値が逆の大小傾向を示すときには値Aが値Bの値を超えたとき、または等しくなったときから1/2T前における回転角を、回転角の極小PLA1,PLA2の反転部として検出することで、反転角及び捻回ピッチが高精度に連続測定できる。
(もっと読む)
物体の寸法取得を向上させる方法およびコンピュータプログラム
本発明は、物体の上に誘導される寸法測定デバイスによる物体の寸法取得の効率を向上させる方法であって、a)測定デバイスを物体の上に誘導して、その寸法を取得するステップと、b)取得した領域の分解能の指示をもたらすステップと、c)測定デバイスを、取得した領域の、所定の基準に基づいて不十分な分解能を指示する少なくとも一部分の上に再度誘導するステップと、d)取得した領域の分解能の指示を更新するステップと、e)所定の基準に基づいて十分な分解能が指示されるまで、ステップc)およびd)を繰り返すステップとを含み、それにより、物体の寸法を十分な分解能で効率的に取得する方法に関する。本発明は、そのためのコンピュータプログラムにも関する。  (もっと読む)
(もっと読む)
測定プログラム作成方法
【課題】被測定物を効率的に測定する。
【解決手段】本発明に係る方法は、外部から入力された被測定物およびこれを測定する第1の装置の形状を示す形状データから、被測定物および第1の装置を三次元で表現する三次元データを作成し、三次元データおよび第1の装置の動作条件を示す動作条件データを用いて、第1の装置を第2の装置上で仮想的に動作させることによって、検出機を用いて被測定物上の点の座標を示す座標データを取得し、座標データに基づいて測定プログラムを作成する。
(もっと読む)
管体計測装置
【課題】押出機に使用されるバレルの内壁の状態に影響されず、バレルの内壁の凹凸(磨耗量等)を正確に計測できるようにする。
【解決手段】管体計測装置10は、バレル12の中空部14を、バレル12の軸線に沿い、且つ、バレル12の内壁に対して非接触で張設されたレール16(第1レール16a、第2レール16b)と、該レール16に摺動自在に取り付けられ、バレル12の内壁までの径方向の距離を測定する距離センサ部18と、該距離センサ部18をレール16に沿って移動させる移動機構20と、モニタ22等が接続された制御装置24(パーソナルコンピュータ等)とを有する。
(もっと読む)
測定装置
【課題】装置の大型化を招くことなく、プローブ間で共用して測定できる測定範囲を維持できる測定装置を提供する。
【解決手段】被測定物を載置したXYステージと、複数種のプローブ9A,9B,9Cを有するプローブホルダ20と、XYステージとプローブホルダ20とを相対移動させる相対移動機構とを備える。プローブホルダ20には、傾斜状に配置された2本のガイドレール31,32を有し、少なくとも2つ以上のプローブ9A,9Bを、選択的にプローブ切替位置CPに対して位置決め可能かつ退避可能に進退させるプローブ切替機構30が設けられている。
(もっと読む)
検査票作成システム
【課題】検査票を作成する際の自由度を高め、作成を容易にする。
【解決手段】本システム1を、一の通い箱7から選択して取り出した一のボディ3について、検査項目「筒外径」に対応して筒外径を測定し外径測定値データとして出力する筒外径測定器21と、同「筒全長」に対応して筒全長を測定し全長測定値データとして出力する全長測定器41と、同「重量」に対応して重量を測定し重量測定値データとして出力する重量測定器51と、筒外径測定器21、全長測定器41および重量測定器51から出力された外径測定値データ、全長測定値データおよび重量測定値データを、表計算ソフトを使用することによって作成した検査票上の予め規定した所定位置のセルにそれぞれ貼付制御するPC10と、を備えて構成されている。PC10は、測定開始釦の押下順を記憶し、記憶した押下順に基づき、選択セルに測定値を貼付制御する。
(もっと読む)
導通測定機及びこれを用いた導通測定方法
【課題】管路の内部撮影と内径測定を可能にすることによって、管路の導通測定時に正確性及び迅速性を向上させ、工事期間及び費用を減少できるようにした導通測定機及びこれを用いた導通測定方法を提供する。
【解決手段】管路内部に投入されるボディーと、前記ボディーの一端に連結され、前記管路内部を撮影してその情報を伝達するカメラと、前記ボディーに複数の支持バーを介して連結され、展開及び縮小可能に設けられる蓋部と、前記蓋部の展開及び縮小によって管路内部の直径を測定してその情報を伝達するために、前記ボディーの側面に設けられるセンサー部と、前記カメラとセンサー部からの情報を保存する保存部と、を備えた導通測定機を提供する。
(もっと読む)
床面検出システム、移動ロボット及び床面検出方法
【課題】正確に床検出を行うことが可能な床面検出システム、移動ロボットや床面検出方法を提供すること。
【解決手段】本発明にかかる床面検出システムは、移動ロボット1に設けられている。まず、姿勢角センサ13の検出した姿勢角データに基づいて複数のセンサ角度候補を設定する。次に、複数のセンサ角度候補のそれぞれについて距離画像センサ12の検出した距離画像データに基づいて床検出を行う。そして、複数のセンサ角度候補のうち、最も多く床検出された候補を、当該床面に対する距離画像センサの角度として選択する。
(もっと読む)
41 - 60 / 123
[ Back to top ]